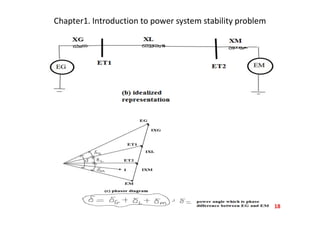
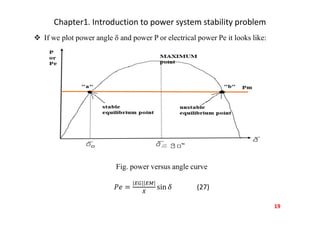
The document introduces the concept of power system dynamics, also known as power system stability, emphasizing the importance of interconnection in modern power systems. It details various classifications of power system stability, including angle and voltage stability, and discusses the swing equation governing synchronous machine rotor dynamics. The document also covers the mathematical modeling involved in analyzing power system stability and the conditions necessary for maintaining equilibrium during disturbances.