Download to read offline


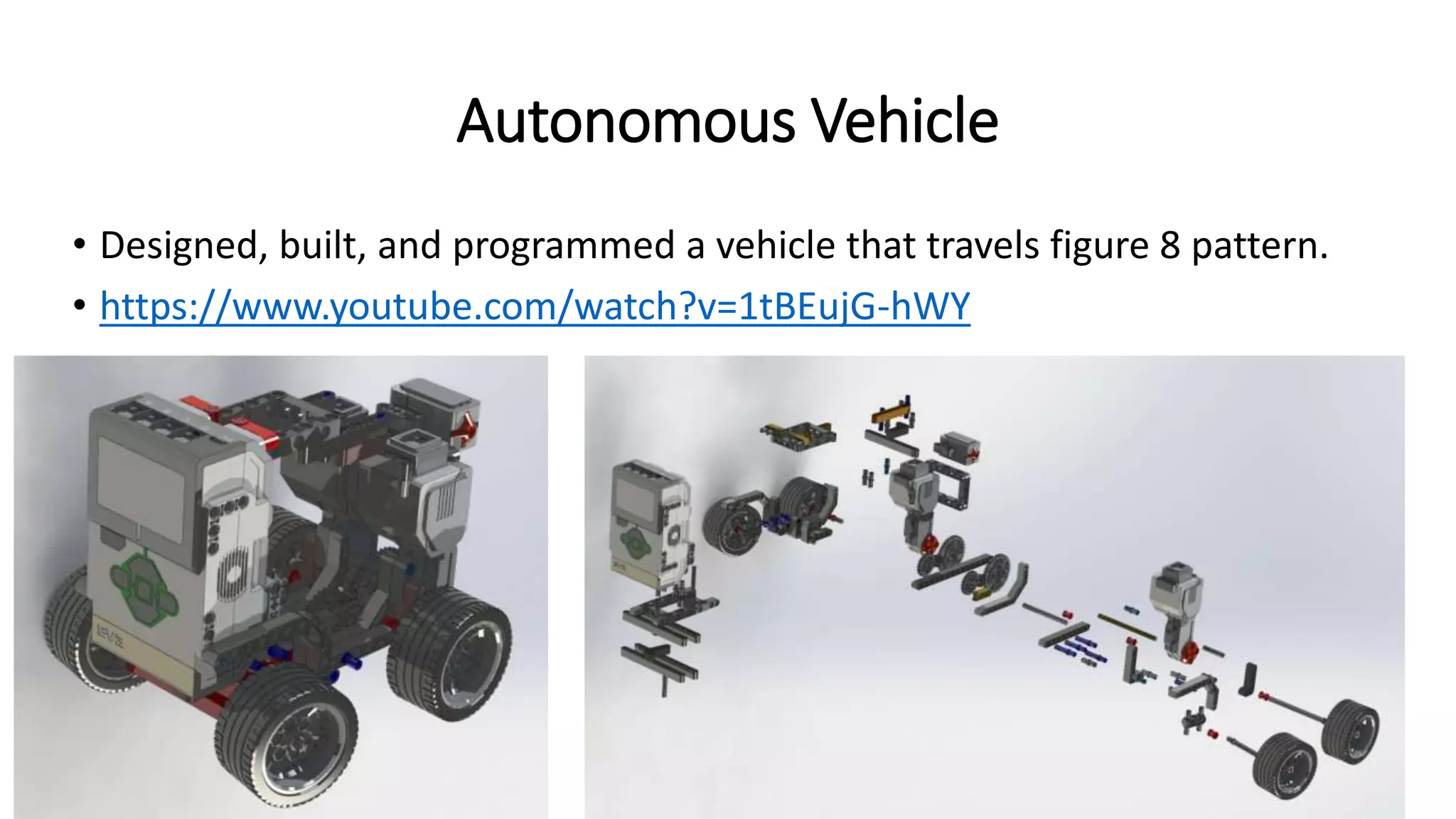



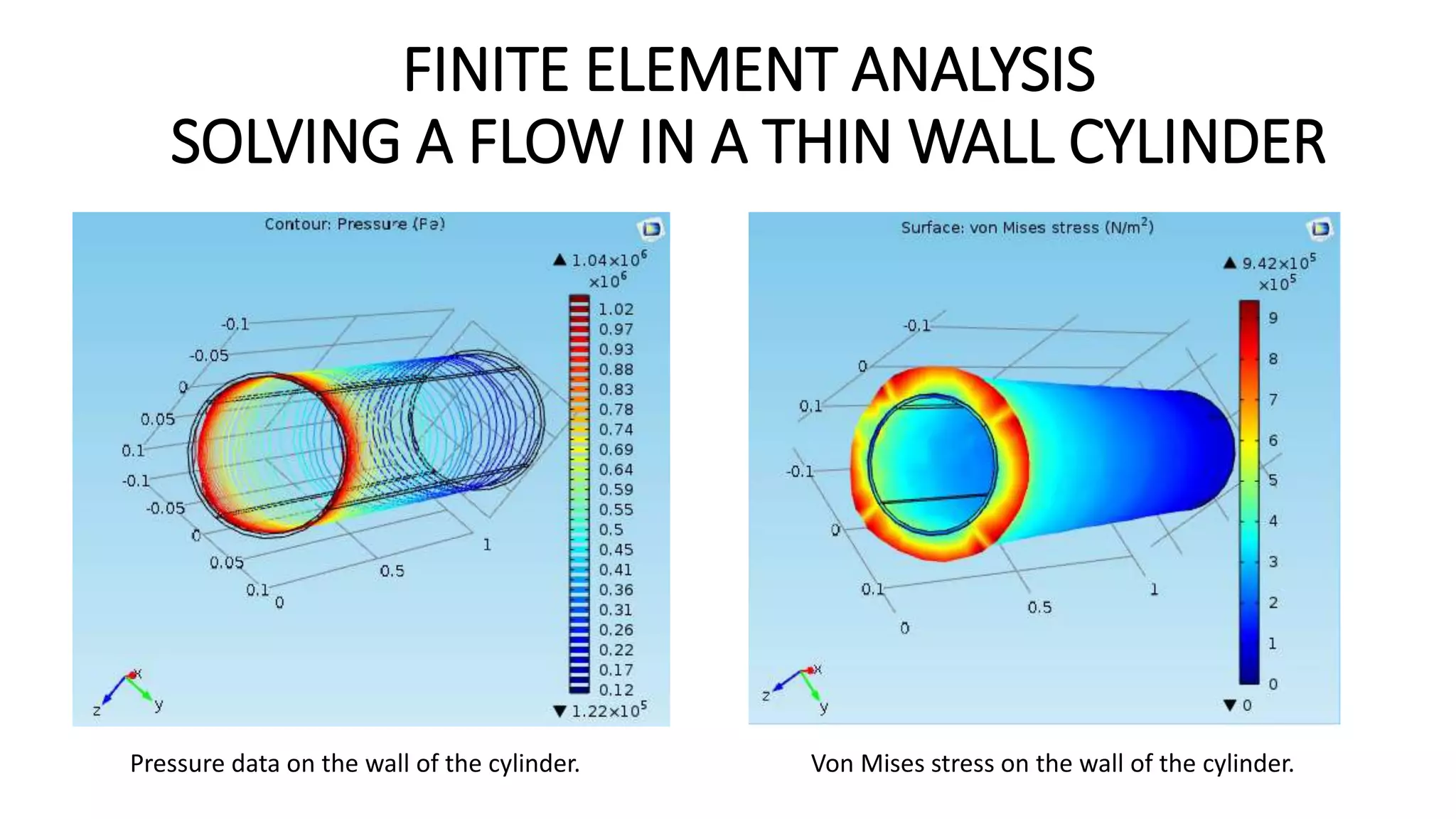
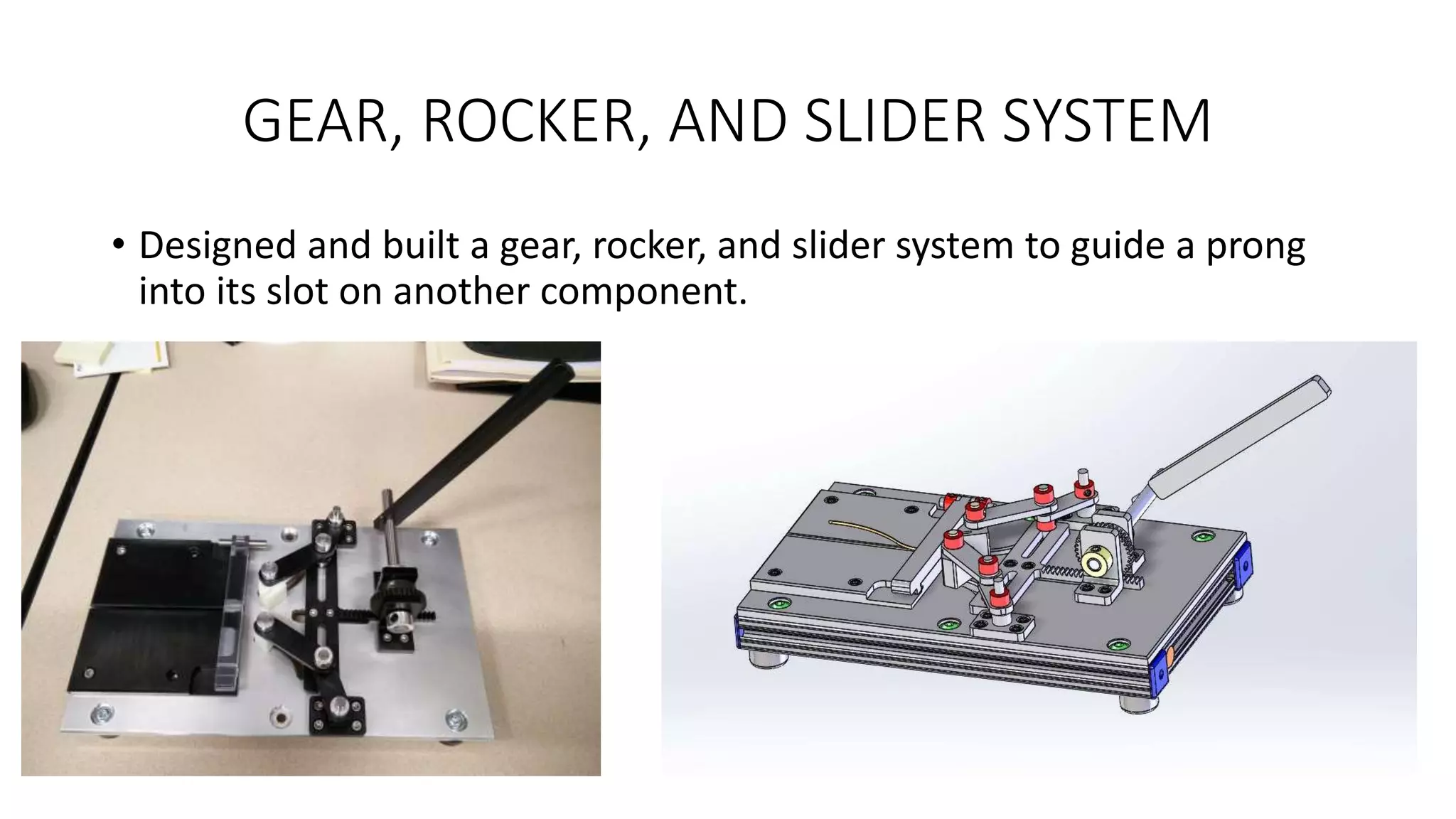



Quoc Tran graduated from UC Berkeley with a degree in mechanical engineering. His curiosity motivates him to learn new technologies and explore the world. Some of his projects include designing and building a gimbal that can track objects and stabilize camera movement, an autonomous vehicle that travels in a figure 8 pattern, studying fracture mechanics using simulation software, and implementing cruise control and adaptive cruise control into vehicles. He has also designed and built walking robots, analyzed fluid flow using finite element analysis, and designed mechanical systems like a gear and slider mechanism. Additional projects involve building a combat robot and a tele-periscope device.















































