Downloaded 18 times
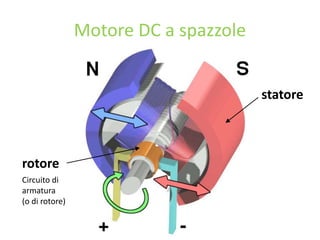

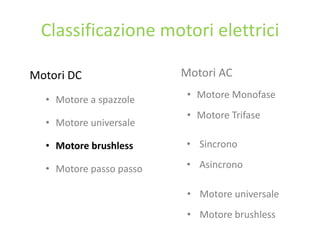
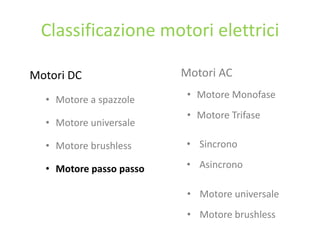

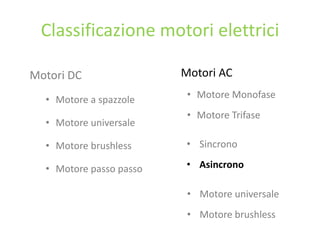






















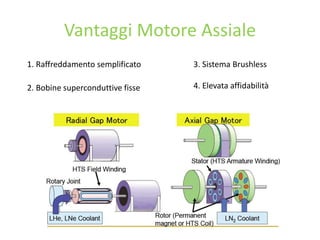


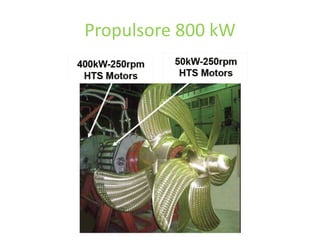






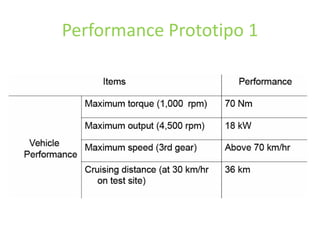
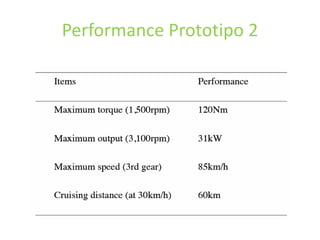


Il documento analizza le applicazioni della superconduttività nei motori, classificando vari tipi di motori elettrici come DC e AC e illustrandone il funzionamento. Inoltre, viene presentato un confronto tra motori asincroni e sincroni, insieme a dettagli su motori ad alta temperatura e superconduttori. Infine, vengono discussi progetti avanzati di motori ad alta potenza e le performance dei prototipi di automobili basate su tecnologia HTS.



























































