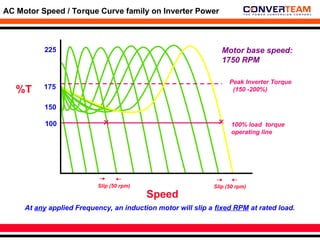
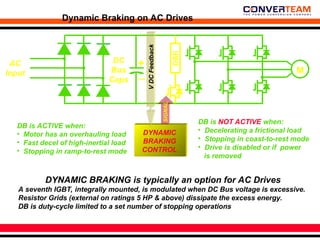
The document discusses the fundamentals of AC and DC motors, focusing on induction motor characteristics, advantages, and operational principles. It explores AC motor design aspects, including stator and rotor elements, and variations in torque and speed in relation to applied frequency. Additionally, it covers AC drive types, control techniques, regenerative capabilities, and dynamic braking in motor applications.
























































![Amit[1]](https://cdn.slidesharecdn.com/ss_thumbnails/amit1-151213064608-thumbnail.jpg?width=640&height=640&fit=bounds)























