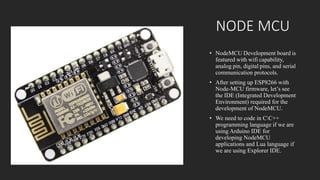
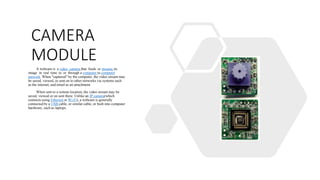
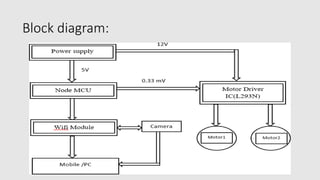
This document proposes a military robot that can be controlled remotely using IoT. It will have sensors, a camera, and be operated through a mobile device to allow control anywhere and anytime. The robot will use a NodeMCU microcontroller connected to DC motors and other hardware. It will send video and data wirelessly and be easy to control through an app. Its applications include search and rescue operations, military reconnaissance, and wireless security and surveillance.