Download to read offline
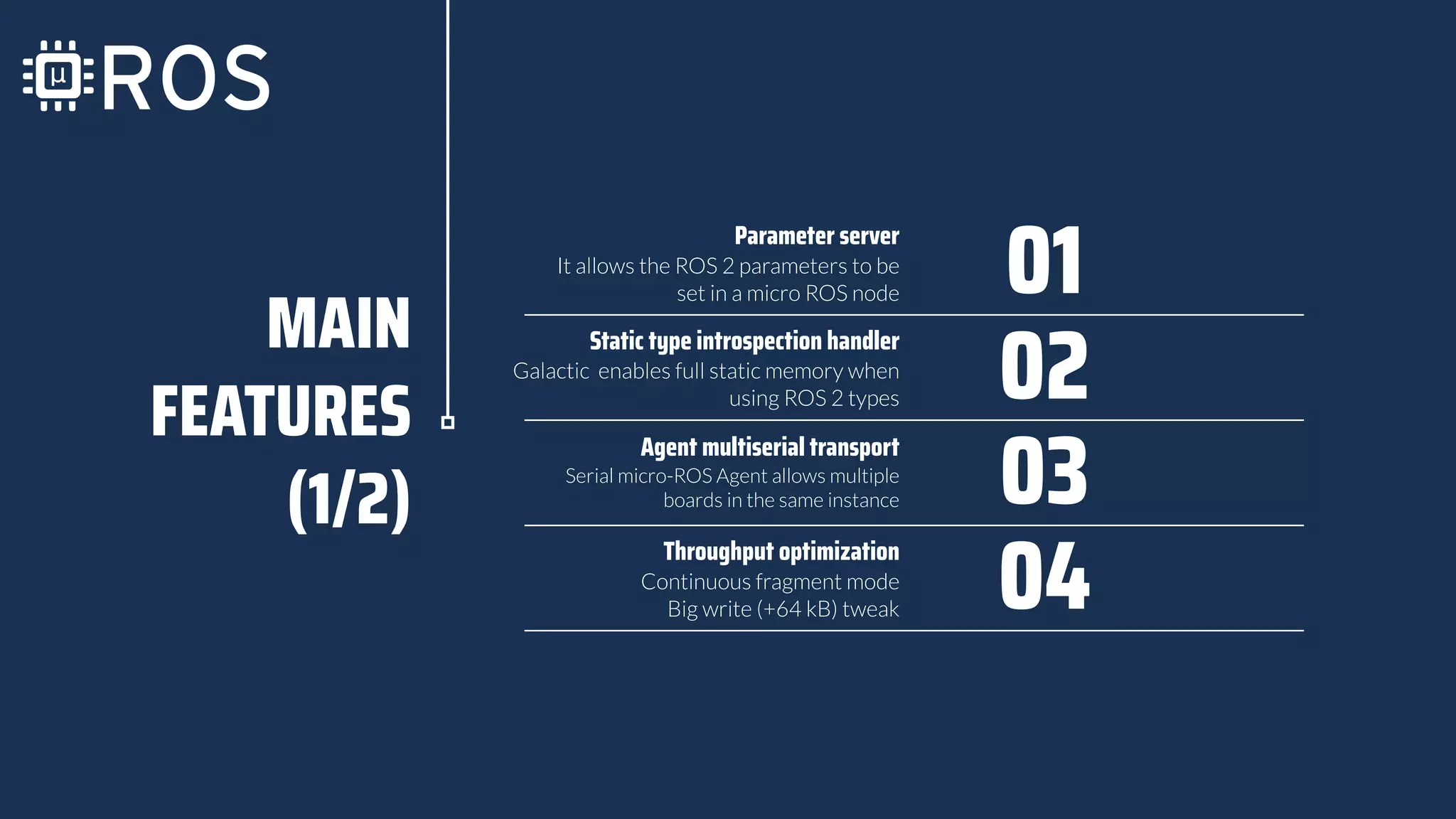

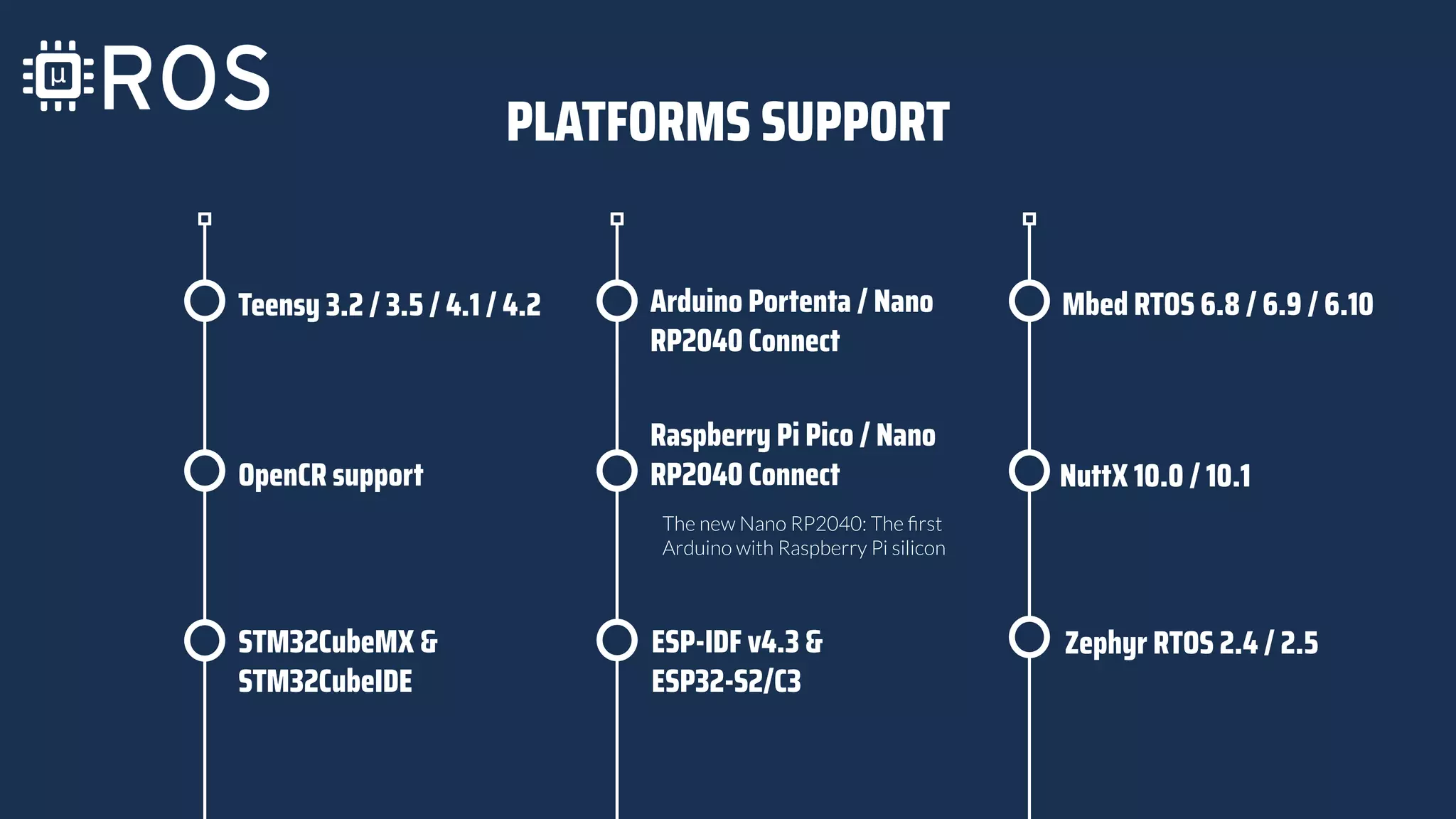
The document describes a robotic framework designed for robotic applications on microcontrollers (MCUs) integrated with ROS 2 Micro-ROS Galactic. Key features include multi-serial transport, parameter server functionality, static type introspection, and client multithreading support across various platforms like Teensy, Arduino, and Raspberry Pi. It highlights improvements in memory optimization, entity creation, and time synchronization for enhanced performance.



























































![[DevFest Strasbourg 2025] - NodeJs Can do that !!](https://cdn.slidesharecdn.com/ss_thumbnails/devfeststrasbourg2025-nodejscandothat-251127142731-da65b6fd-thumbnail.jpg?width=640&height=640&fit=bounds)




![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)









