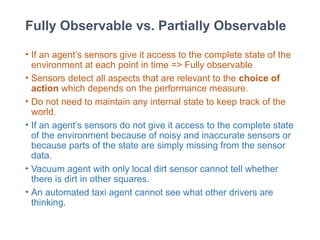
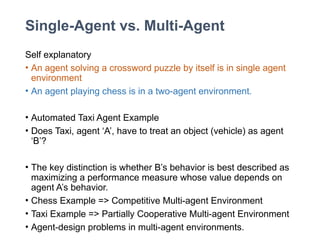
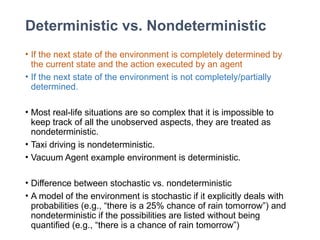
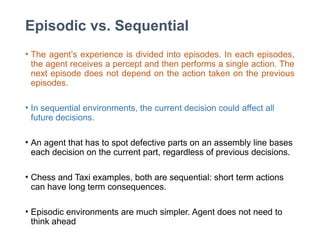
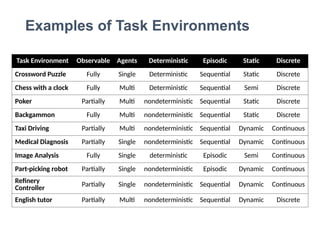
The document discusses the properties of environments in artificial intelligence, categorizing them based on characteristics such as observability, agent type, determinism, and dynamics. It highlights the differences between single-agent and multi-agent environments, and defines episodic versus sequential decision-making scenarios, along with static versus dynamic and discrete versus continuous environments. Examples are provided to illustrate each category, emphasizing the importance of understanding these properties for effective agent design.











![Artificial-Lecture-02[Intelligent Agent].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ai-lecture-02intelligentagent-250831114453-e46813b6-thumbnail.jpg?width=640&height=640&fit=bounds)
![AI-Lecture-02[Intelligent Agent]AI-Lecture-02[Intelligent Agent].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ai-lecture-02intelligentagent-251204170600-34337101-thumbnail.jpg?width=640&height=640&fit=bounds)


































