Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
YY
Uploaded by
Yasuaki Yoshimitsu
PPTX, PDF
1,325 views
JAWS DAYS 2017 Deep Dive IAM 権限をこえて 〜第三部 IAMの鼓動はログ〜
JAWS DAYS 2017 Deep Dive IAM 権限をこえて 第一部 IAMを継ぐ者 第二部 policyたち 第三部 IAMの鼓動はログ
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 18
2
/ 18
3
/ 18
4
/ 18
5
/ 18
6
/ 18
7
/ 18
8
/ 18
9
/ 18
10
/ 18
11
/ 18
12
/ 18
13
/ 18
14
/ 18
15
/ 18
16
/ 18
17
/ 18
18
/ 18
More Related Content
PDF
「これ危ない設定じゃないでしょうか」とヒアリングするための仕組み @AWS Summit Tokyo 2018
by
cyberagent
PDF
JAWS-UG CLI #27 LT ActiveDirectoryのユーザとパスワードでManagement Consoleにログインする
by
Nobuhiro Nakayama
PDF
AWS re:Inforce reCap 注目のサービス
by
Ai Hayakawa
PDF
サーバーレスの今とこれから
by
真吾 吉田
PDF
サーバーレスでシステムを開発する時に⼤切な事
by
Hiroyuki Hiki
PPTX
jawsdays 2017 新訳-とある設計士の雲設計定石目録_3
by
a kyane
PDF
AWSでアプリ開発するなら 知っておくべこと
by
Keisuke Nishitani
PDF
[JAWS DAYS 2017 ワークショップ] 不安で夜眠れないAWSアカウント管理者に送る処方箋という名のハンズオン
by
Keisuke Kadoyama
「これ危ない設定じゃないでしょうか」とヒアリングするための仕組み @AWS Summit Tokyo 2018
by
cyberagent
JAWS-UG CLI #27 LT ActiveDirectoryのユーザとパスワードでManagement Consoleにログインする
by
Nobuhiro Nakayama
AWS re:Inforce reCap 注目のサービス
by
Ai Hayakawa
サーバーレスの今とこれから
by
真吾 吉田
サーバーレスでシステムを開発する時に⼤切な事
by
Hiroyuki Hiki
jawsdays 2017 新訳-とある設計士の雲設計定石目録_3
by
a kyane
AWSでアプリ開発するなら 知っておくべこと
by
Keisuke Nishitani
[JAWS DAYS 2017 ワークショップ] 不安で夜眠れないAWSアカウント管理者に送る処方箋という名のハンズオン
by
Keisuke Kadoyama
Viewers also liked
PDF
JAWS-UG Meets Windows (JAWS Days 2017)
by
Amazon Web Services Japan
PDF
DevOpsとか言う前にAWSエンジニアに知ってほしいアプリケーションのこと
by
Terui Masashi
PDF
JAWS DAYS 2017 [AWSワークショップ] AWS初心者いらっしゃい
by
iwata jaws-ug
PDF
20170311 jawsdays 公開
by
Hideki Ojima
PDF
PIXTAにおけるCloudSearchのコスト削減
by
PIXTA Inc.
PDF
JAWS DAYS 2017 Mafia Talk
by
真吾 吉田
PDF
Workshop: Docker on Elastic Beanstalk
by
輝 子安
PPTX
Jaws days2017-ops jaws-2
by
Serverworks Co.,Ltd.
PPTX
20170311 jawsdays 新訳 とあるアーキテクトのクラウドデザインパターン目録
by
Naomi Yamasaki
PPTX
mizuderuからnekoderuへ
by
Yoshinori Yamanouchi
PDF
日本語でおk AI スピーカーを作ってみた
by
崇之 清水
PDF
JAWS DAYS 2017「サーバーレスが切り拓く Eightのリアルタイム大規模データ分析」
by
Yotaro Fujii
PDF
JAWSDAYS2017 新訳 とあるアーキテクトのクラウドデザインパターン目録 AMI Maintenance Environment
by
Jin k
PPTX
APIを叩くだけでない、Deep Learning on AWS で自分だけの学習モデルを作ろう! by JAWS-UG AI支部
by
Daisuke Nagao
PPTX
AWSで始めるサーバレスな RESTful API システム
by
Masayuki Kato
PPTX
子ども向けプログラミング道場を運営してみたお話し〜CoderDojo長岡京と、時々、EC2〜
by
Akira Nagata
PDF
AWSKRUGの現状 (Sanguk Park) - JAWS Days 2017
by
AWSKRUG - AWS한국사용자모임
PDF
Cross-regional Application Deplolyment on AWS - Channy Yun (JAWS Days 2017)
by
Amazon Web Services Korea
PPTX
Raspberry Piを利用した顔の表情分析と感情を認識するシステム構築
by
Hyunmin Kim
PDF
サーバーレスアーキテクチャのすすめ(公開版)
by
Keisuke Kadoyama
JAWS-UG Meets Windows (JAWS Days 2017)
by
Amazon Web Services Japan
DevOpsとか言う前にAWSエンジニアに知ってほしいアプリケーションのこと
by
Terui Masashi
JAWS DAYS 2017 [AWSワークショップ] AWS初心者いらっしゃい
by
iwata jaws-ug
20170311 jawsdays 公開
by
Hideki Ojima
PIXTAにおけるCloudSearchのコスト削減
by
PIXTA Inc.
JAWS DAYS 2017 Mafia Talk
by
真吾 吉田
Workshop: Docker on Elastic Beanstalk
by
輝 子安
Jaws days2017-ops jaws-2
by
Serverworks Co.,Ltd.
20170311 jawsdays 新訳 とあるアーキテクトのクラウドデザインパターン目録
by
Naomi Yamasaki
mizuderuからnekoderuへ
by
Yoshinori Yamanouchi
日本語でおk AI スピーカーを作ってみた
by
崇之 清水
JAWS DAYS 2017「サーバーレスが切り拓く Eightのリアルタイム大規模データ分析」
by
Yotaro Fujii
JAWSDAYS2017 新訳 とあるアーキテクトのクラウドデザインパターン目録 AMI Maintenance Environment
by
Jin k
APIを叩くだけでない、Deep Learning on AWS で自分だけの学習モデルを作ろう! by JAWS-UG AI支部
by
Daisuke Nagao
AWSで始めるサーバレスな RESTful API システム
by
Masayuki Kato
子ども向けプログラミング道場を運営してみたお話し〜CoderDojo長岡京と、時々、EC2〜
by
Akira Nagata
AWSKRUGの現状 (Sanguk Park) - JAWS Days 2017
by
AWSKRUG - AWS한국사용자모임
Cross-regional Application Deplolyment on AWS - Channy Yun (JAWS Days 2017)
by
Amazon Web Services Korea
Raspberry Piを利用した顔の表情分析と感情を認識するシステム構築
by
Hyunmin Kim
サーバーレスアーキテクチャのすすめ(公開版)
by
Keisuke Kadoyama
Similar to JAWS DAYS 2017 Deep Dive IAM 権限をこえて 〜第三部 IAMの鼓動はログ〜
PDF
AWS Black Belt Techシリーズ AWS IAM
by
Amazon Web Services Japan
PDF
IAM & Consolidated Billing -ほぼ週刊AWSマイスターシリーズ第4回
by
SORACOM, INC
PDF
20120201 aws meister-reloaded-iam-and-billing-public
by
Amazon Web Services Japan
PDF
[AWSマイスターシリーズ]Identity and Access Management (IAM)
by
Amazon Web Services Japan
PDF
Developers.IO 2018 ビジネスを阻害しない!AWS アカウントの管理
by
Nobuhiro Nakayama
PDF
Day 1 with Amazon Web Services - AWSご利用開始時に最低限おさえておきたい10のこと
by
Amazon Web Services Japan
PPTX
AWSアカウントに関する不正使用を整理してみた
by
Naoto Katsumi
PDF
AWS Black Belt Online Seminar 2017 AWS体験ハンズオン~Amazon S3 バックアップ~
by
Amazon Web Services Japan
PDF
Data Lake Security on AWS
by
Amazon Web Services Japan
PPTX
20190920 AWS IAM
by
yamamotomsc
PDF
AWS Black Belt Techシリーズ AWS IAM
by
Amazon Web Services Japan
PPTX
DeNA の AWS アカウント管理とセキュリティ監査自動化
by
DeNA
PPTX
PenTesterが知っている危ないAWS環境の共通点
by
zaki4649
PDF
AWS Black Belt Techシリーズ Amazon Simple Storage Service (Amazon S3)
by
Amazon Web Services Japan
PDF
AWS Black Belt Techシリーズ AWS Management Console
by
Amazon Web Services Japan
PDF
[!注意! 2013年2月時点の資料] Amazon Web Services (AWS)について
by
Aya Komuro
PDF
AWS Black Belt Online Seminar 2018 ReInvent recap security other
by
Amazon Web Services Japan
PDF
AWS におけるモニタリングとセキュリティの基本について - "毎日のAWSのための監視、運用、セキュリティ最適化セミナー" -
by
Takanori Ohba
PPTX
クラウド移行で改善するガバナンスファーストのWebサービス障害対策について
by
TakashiTsukamoto4
PDF
JAWS-UG初心者支部#2 AWSでアカウント作ったら最初にやるべきこと
by
Nobuhiro Nakayama
AWS Black Belt Techシリーズ AWS IAM
by
Amazon Web Services Japan
IAM & Consolidated Billing -ほぼ週刊AWSマイスターシリーズ第4回
by
SORACOM, INC
20120201 aws meister-reloaded-iam-and-billing-public
by
Amazon Web Services Japan
[AWSマイスターシリーズ]Identity and Access Management (IAM)
by
Amazon Web Services Japan
Developers.IO 2018 ビジネスを阻害しない!AWS アカウントの管理
by
Nobuhiro Nakayama
Day 1 with Amazon Web Services - AWSご利用開始時に最低限おさえておきたい10のこと
by
Amazon Web Services Japan
AWSアカウントに関する不正使用を整理してみた
by
Naoto Katsumi
AWS Black Belt Online Seminar 2017 AWS体験ハンズオン~Amazon S3 バックアップ~
by
Amazon Web Services Japan
Data Lake Security on AWS
by
Amazon Web Services Japan
20190920 AWS IAM
by
yamamotomsc
AWS Black Belt Techシリーズ AWS IAM
by
Amazon Web Services Japan
DeNA の AWS アカウント管理とセキュリティ監査自動化
by
DeNA
PenTesterが知っている危ないAWS環境の共通点
by
zaki4649
AWS Black Belt Techシリーズ Amazon Simple Storage Service (Amazon S3)
by
Amazon Web Services Japan
AWS Black Belt Techシリーズ AWS Management Console
by
Amazon Web Services Japan
[!注意! 2013年2月時点の資料] Amazon Web Services (AWS)について
by
Aya Komuro
AWS Black Belt Online Seminar 2018 ReInvent recap security other
by
Amazon Web Services Japan
AWS におけるモニタリングとセキュリティの基本について - "毎日のAWSのための監視、運用、セキュリティ最適化セミナー" -
by
Takanori Ohba
クラウド移行で改善するガバナンスファーストのWebサービス障害対策について
by
TakashiTsukamoto4
JAWS-UG初心者支部#2 AWSでアカウント作ったら最初にやるべきこと
by
Nobuhiro Nakayama
Recently uploaded
PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
JAWS DAYS 2017 Deep Dive IAM 権限をこえて 〜第三部 IAMの鼓動はログ〜
1.
Deep Dive IAM権限を超えて 第三部
『IAMの鼓動はログ』 2017/03/11
2.
自己紹介 好光 泰章(よしみつ やすあき) NEC
ソリューションイノベータ株式会社 HAクラスタ屋さん Security-JAWS 3バカトリオ#3 JAWS-UG横浜支部 1 NES:AWSのリセール提供
3.
2 • AWSアカウントの不正利用 高額請求、ビジネスの停止 •
適切でないAWSアカウントの存在 おかしな初期設定のアカウント セキュリティの見直しされてないアカウント とりあえず作成したアカウント ずっと使ってないアカウント IAM界隈での出来事 IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
4.
『そうだな…IAMの宿命だものな。 IAMは事態の善悪など分からずに、 命令に従うんだものな。許してやるよ! 』 IAM権限を超えて 〜
第三部 IAMの鼓動はログ 〜
5.
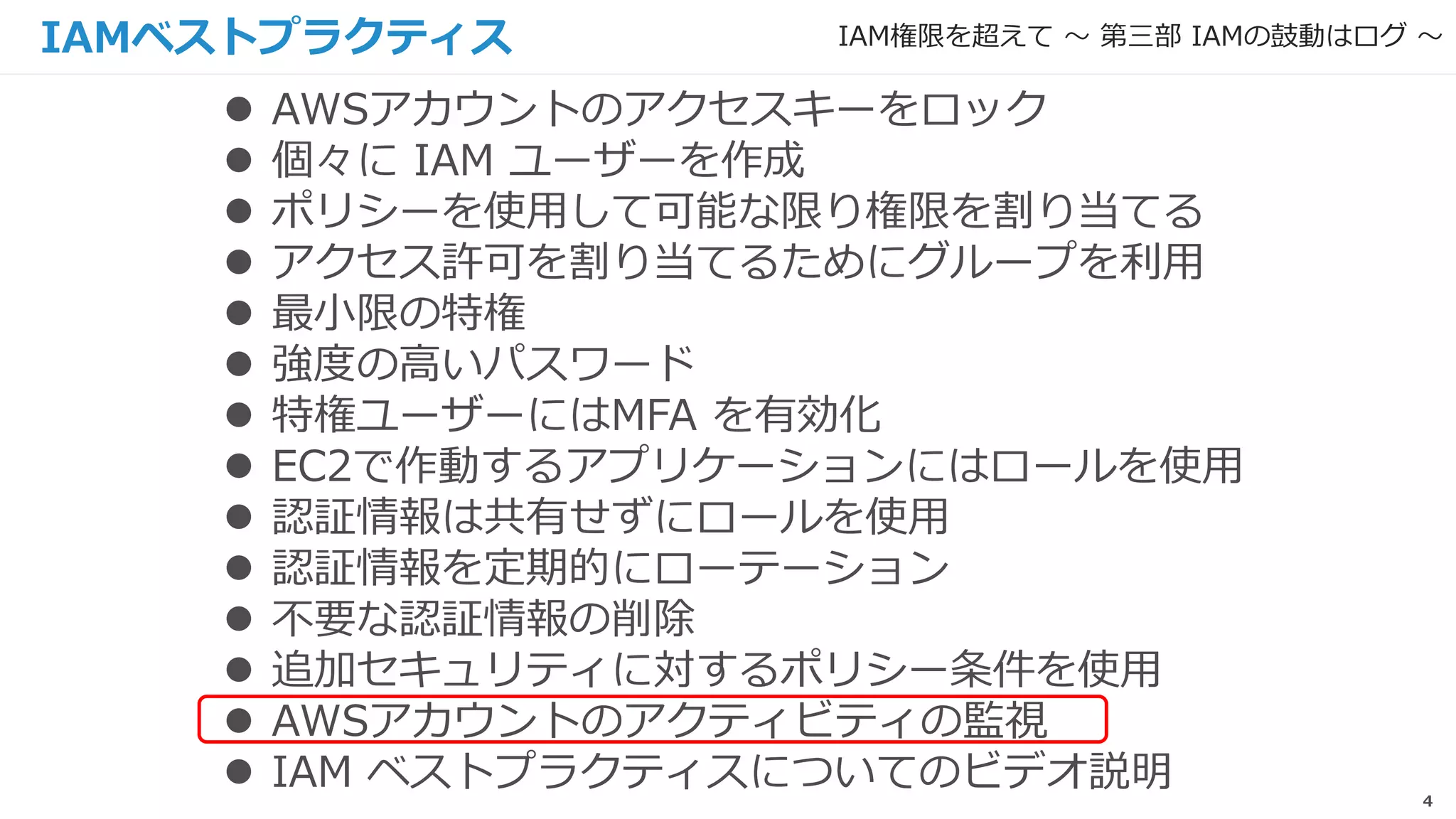
4 IAMベストプラクティス AWSアカウントのアクセスキーをロック 個々に
IAM ユーザーを作成 ポリシーを使用して可能な限り権限を割り当てる アクセス許可を割り当てるためにグループを利用 最小限の特権 強度の高いパスワード 特権ユーザーにはMFA を有効化 EC2で作動するアプリケーションにはロールを使用 認証情報は共有せずにロールを使用 認証情報を定期的にローテーション 不要な認証情報の削除 追加セキュリティに対するポリシー条件を使用 AWSアカウントのアクティビティの監視 IAM ベストプラクティスについてのビデオ説明 IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
6.
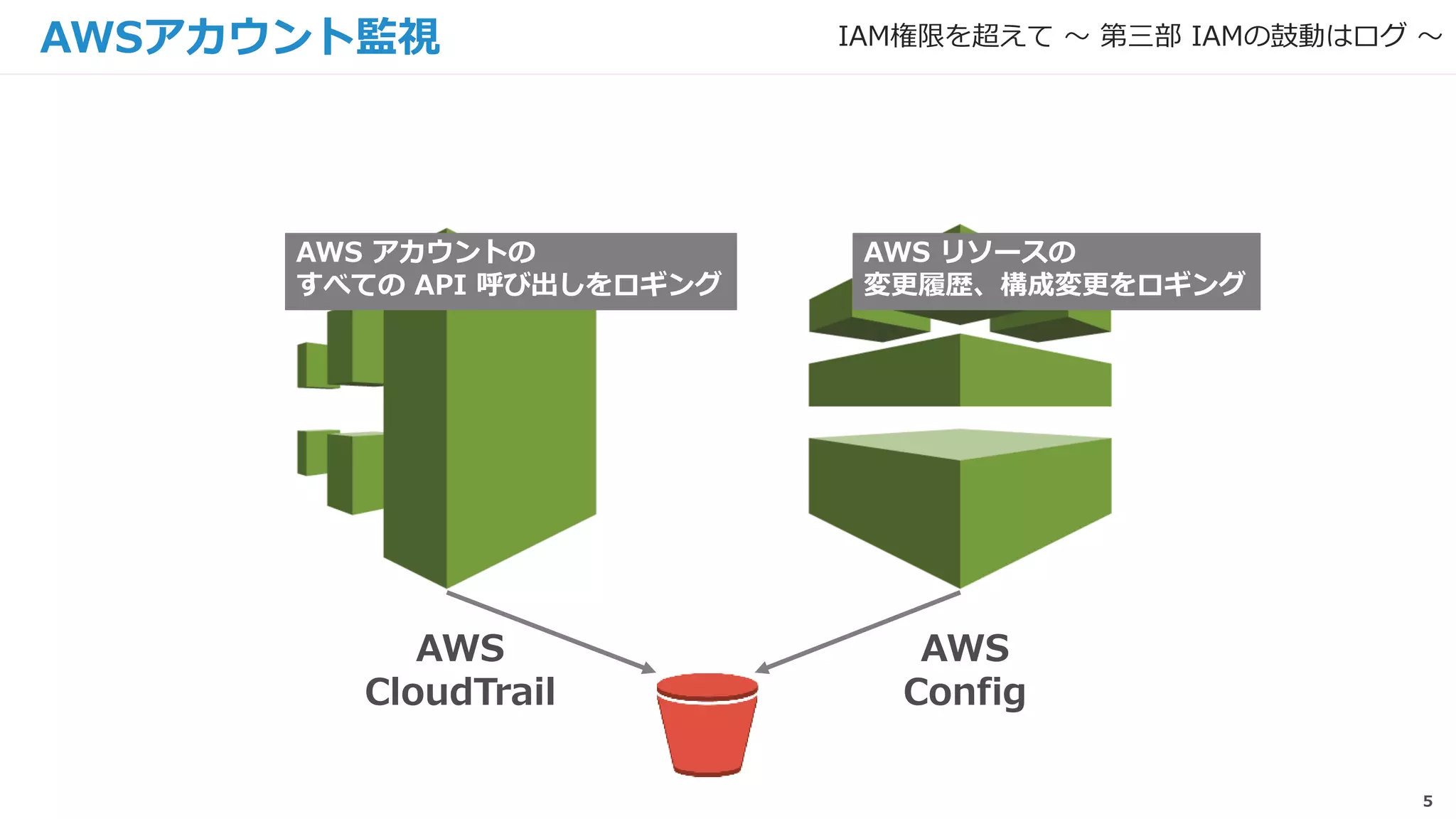
5 AWSアカウント監視 AWS CloudTrail AWS Config AWS アカウントの すべての API
呼び出しをロギング AWS リソースの 変更履歴、構成変更をロギング IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
7.
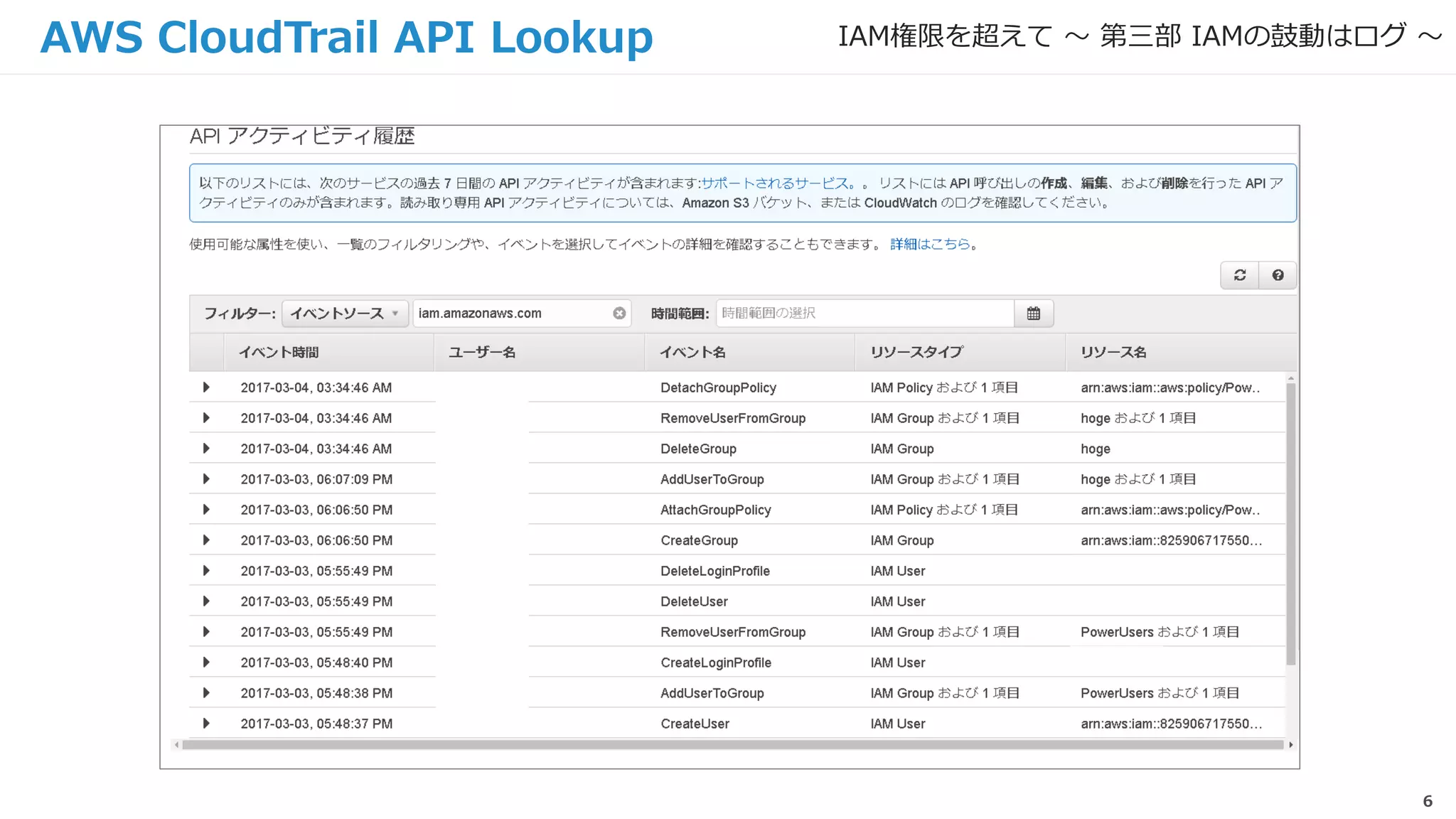
6 AWS CloudTrail API
Lookup IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
8.
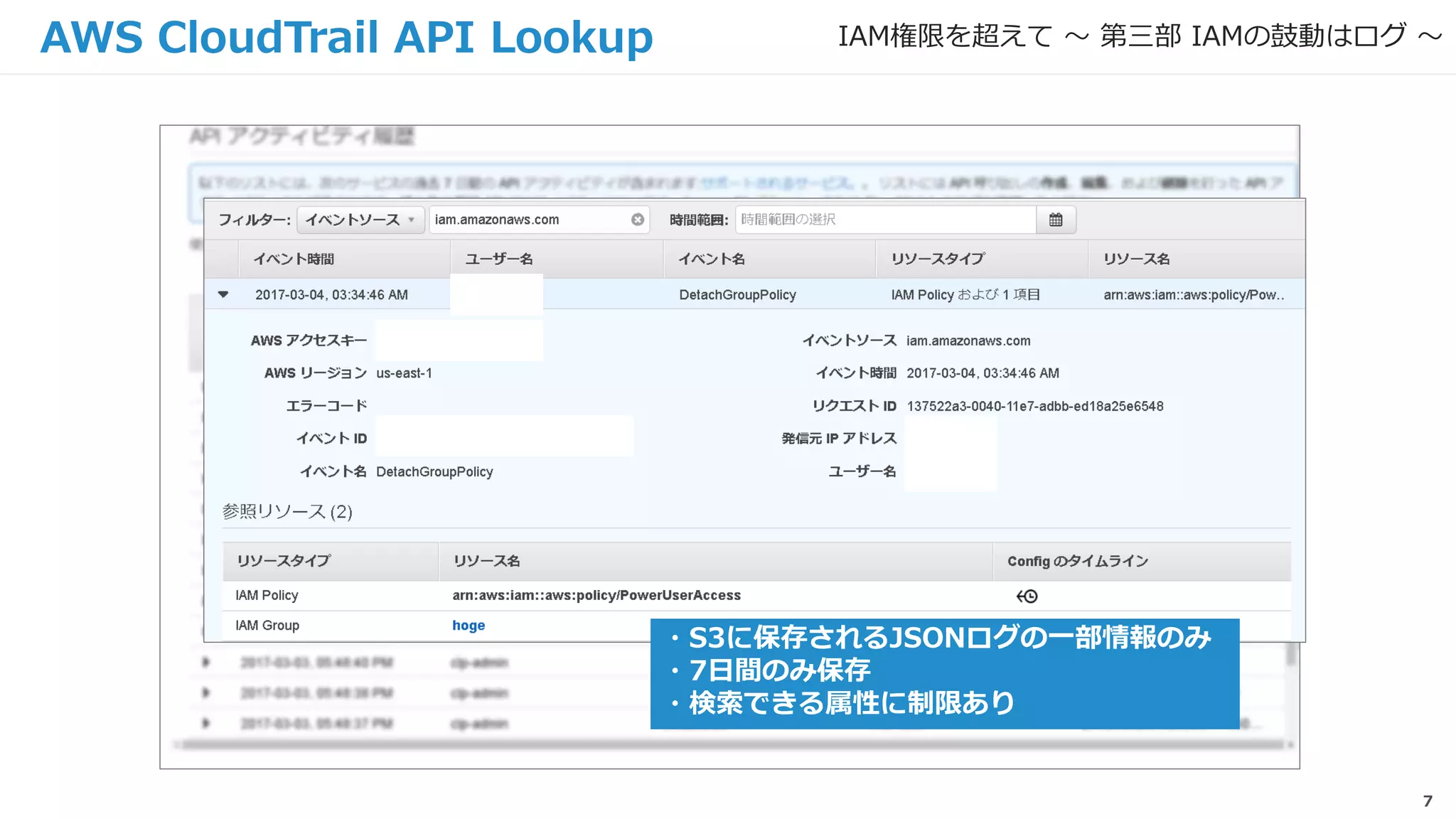
7 AWS CloudTrail API
Lookup ・S3に保存されるJSONログの一部情報のみ ・7日間のみ保存 ・検索できる属性に制限あり IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
9.
8 サインイン成功 { "eventVersion": "1.05", "userIdentity": { "type":
"IAMUser", "principalId": “xxx", "arn": "arn:aws:iam::xx:user/xxUser", "accountId": “111111111111, "userName": “xxUser" }, "eventTime": "2017-03-01T03:07:48Z", "eventSource": "signin.amazonaws.com", "eventName": "ConsoleLogin", "awsRegion": "ap-northeast-1", "sourceIPAddress": “11.22.33.44", "userAgent": "Mozilla/5.0 (Windows NT 6.1; rv:49.0) Gecko/20100101 Firefox/49.0", "requestParameters": null, "responseElements": { "ConsoleLogin": "Success" }, "additionalEventData": { "LoginTo": "https://ap-northeast-1.console.aws.amazon.com/xxx", "MobileVersion": "No", "MFAUsed": "No" }, "eventID": "1c6338ba-691a-488d-900c-c6d56d882f08", "eventType": "AwsConsoleSignIn", "recipientAccountId": “111111111111" } 誰が? どのリソース? 何するの? どやった? IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜 MFA使ってない
10.
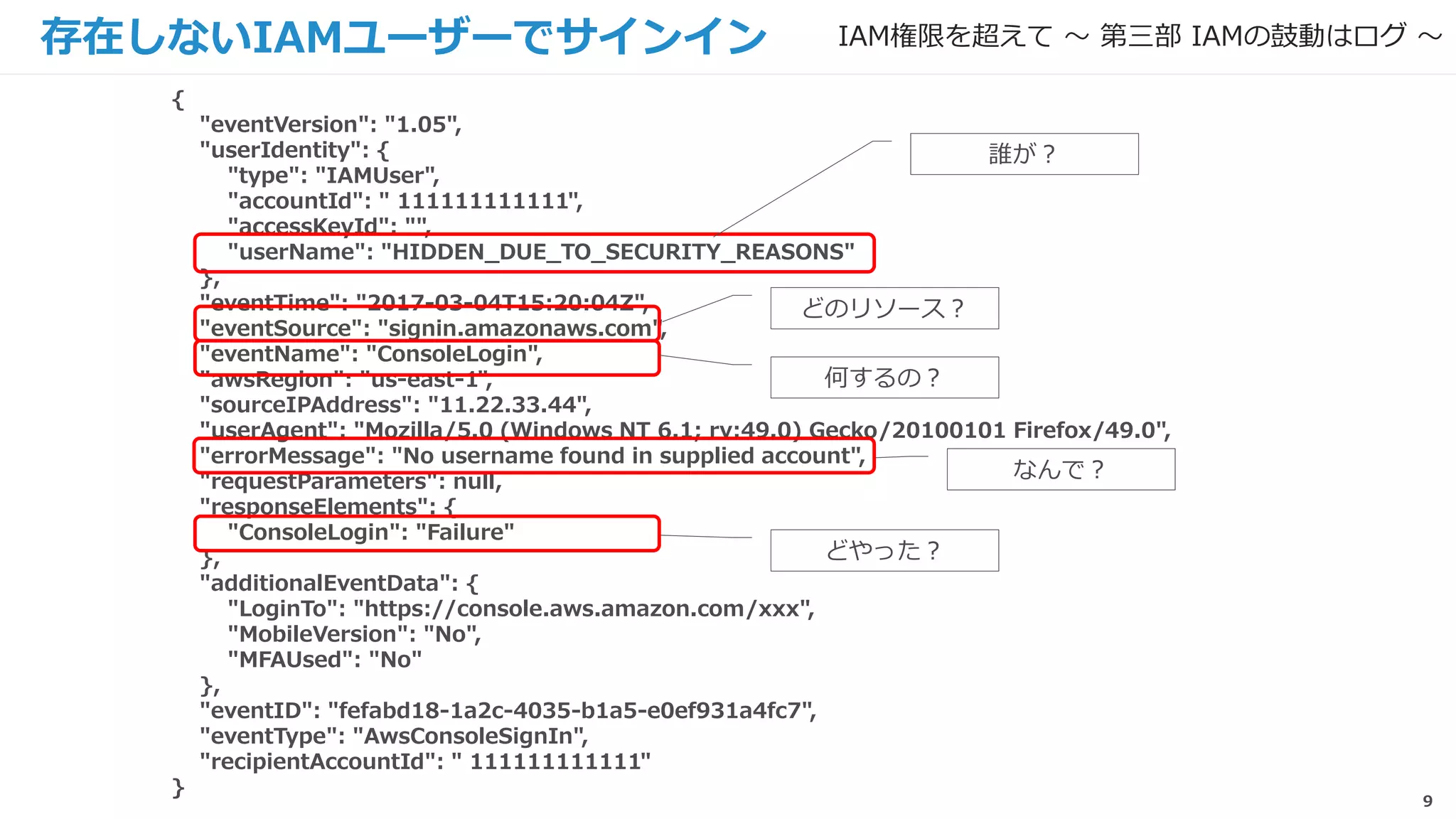
9 存在しないIAMユーザーでサインイン { "eventVersion": "1.05", "userIdentity": { "type":
"IAMUser", "accountId": " 111111111111", "accessKeyId": "", "userName": "HIDDEN_DUE_TO_SECURITY_REASONS" }, "eventTime": "2017-03-04T15:20:04Z", "eventSource": "signin.amazonaws.com", "eventName": "ConsoleLogin", "awsRegion": "us-east-1", "sourceIPAddress": "11.22.33.44", "userAgent": "Mozilla/5.0 (Windows NT 6.1; rv:49.0) Gecko/20100101 Firefox/49.0", "errorMessage": "No username found in supplied account", "requestParameters": null, "responseElements": { "ConsoleLogin": "Failure" }, "additionalEventData": { "LoginTo": "https://console.aws.amazon.com/xxx", "MobileVersion": "No", "MFAUsed": "No" }, "eventID": "fefabd18-1a2c-4035-b1a5-e0ef931a4fc7", "eventType": "AwsConsoleSignIn", "recipientAccountId": " 111111111111" } 誰が? どのリソース? 何するの? どやった? なんで? IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
11.
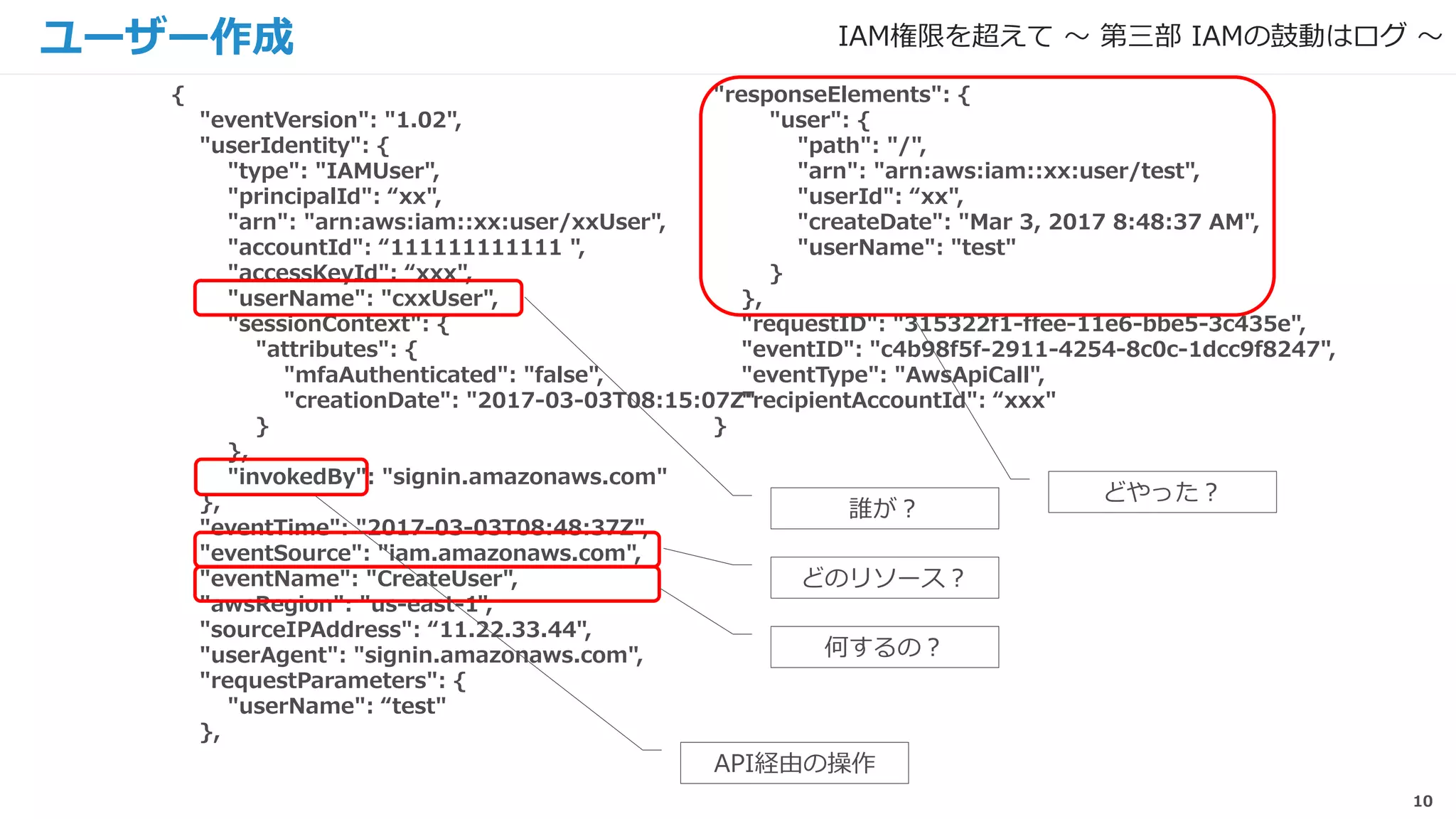
10 ユーザー作成 { "eventVersion": "1.02", "userIdentity": { "type":
"IAMUser", "principalId": “xx", "arn": "arn:aws:iam::xx:user/xxUser", "accountId": “111111111111 ", "accessKeyId": “xxx", "userName": "cxxUser", "sessionContext": { "attributes": { "mfaAuthenticated": "false", "creationDate": "2017-03-03T08:15:07Z" } }, "invokedBy": "signin.amazonaws.com" }, "eventTime": "2017-03-03T08:48:37Z", "eventSource": "iam.amazonaws.com", "eventName": "CreateUser", "awsRegion": "us-east-1", "sourceIPAddress": “11.22.33.44", "userAgent": "signin.amazonaws.com", "requestParameters": { "userName": “test" }, "responseElements": { "user": { "path": "/", "arn": "arn:aws:iam::xx:user/test", "userId": “xx", "createDate": "Mar 3, 2017 8:48:37 AM", "userName": "test" } }, "requestID": "315322f1-ffee-11e6-bbe5-3c435e", "eventID": "c4b98f5f-2911-4254-8c0c-1dcc9f8247", "eventType": "AwsApiCall", "recipientAccountId": “xxx" } 誰が? どのリソース? どやった? 何するの? API経由の操作 IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
12.
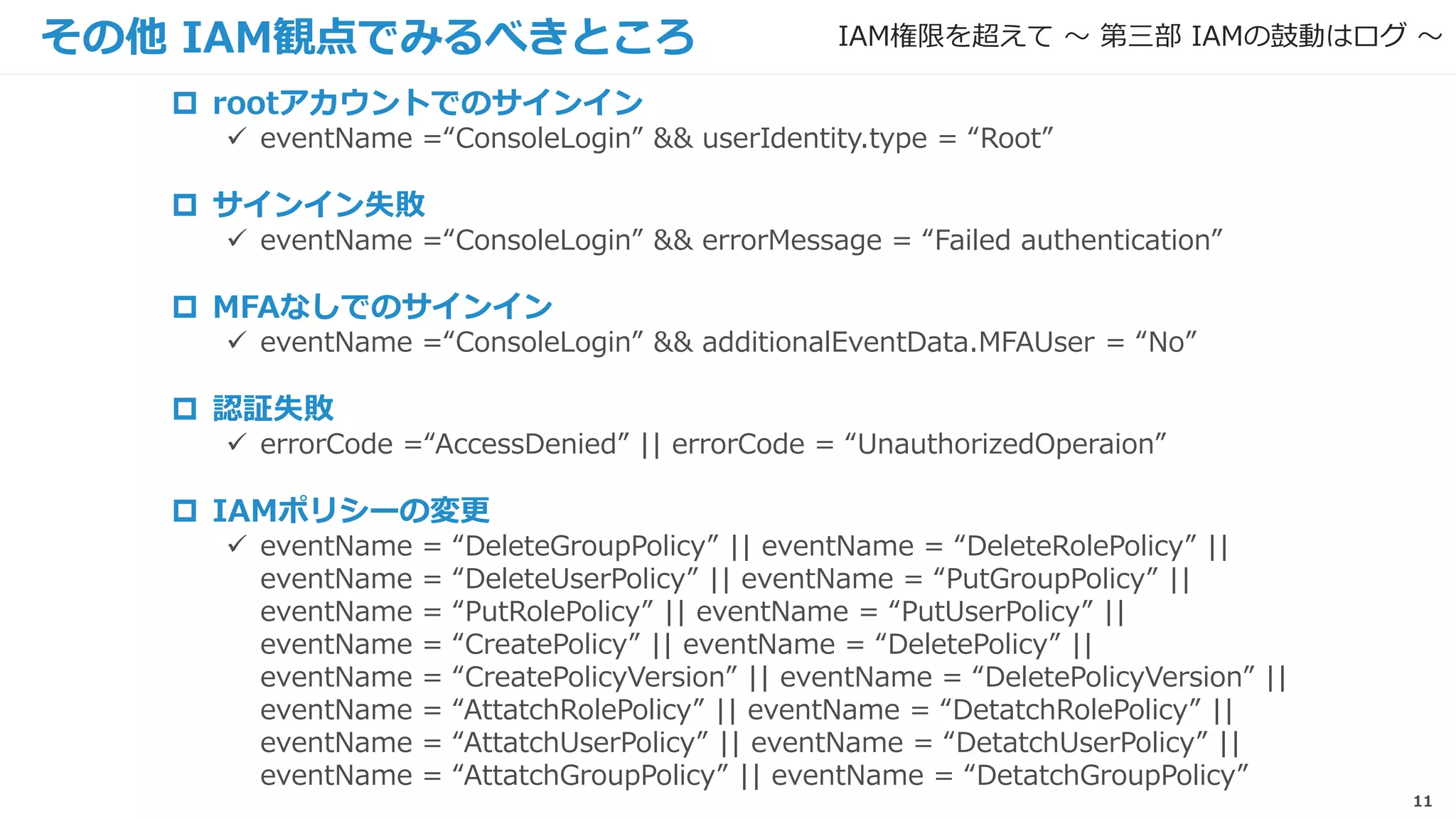
11 その他 IAM観点でみるべきところ rootアカウントでのサインイン
eventName =“ConsoleLogin” && userIdentity.type = “Root” サインイン失敗 eventName =“ConsoleLogin” && errorMessage = “Failed authentication” MFAなしでのサインイン eventName =“ConsoleLogin” && additionalEventData.MFAUser = “No” 認証失敗 errorCode =“AccessDenied” || errorCode = “UnauthorizedOperaion” IAMポリシーの変更 eventName = “DeleteGroupPolicy” || eventName = “DeleteRolePolicy” || eventName = “DeleteUserPolicy” || eventName = “PutGroupPolicy” || eventName = “PutRolePolicy” || eventName = “PutUserPolicy” || eventName = “CreatePolicy” || eventName = “DeletePolicy” || eventName = “CreatePolicyVersion” || eventName = “DeletePolicyVersion” || eventName = “AttatchRolePolicy” || eventName = “DetatchRolePolicy” || eventName = “AttatchUserPolicy” || eventName = “DetatchUserPolicy” || eventName = “AttatchGroupPolicy” || eventName = “DetatchGroupPolicy” IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
13.
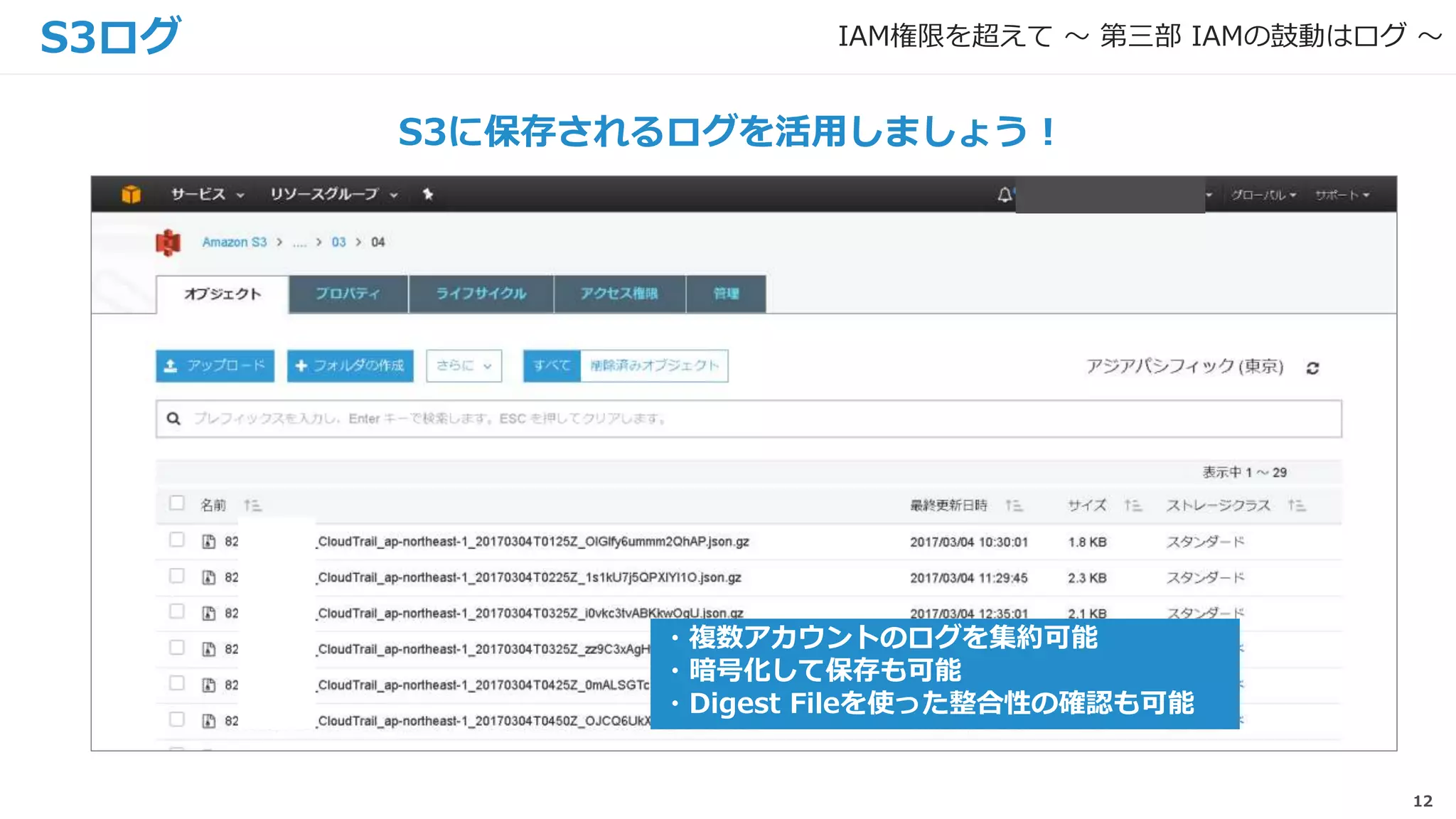
12 S3ログ S3に保存されるログを活用しましょう! ・複数アカウントのログを集約可能 ・暗号化して保存も可能 ・Digest Fileを使った整合性の確認も可能 IAM権限を超えて 〜
第三部 IAMの鼓動はログ 〜
14.
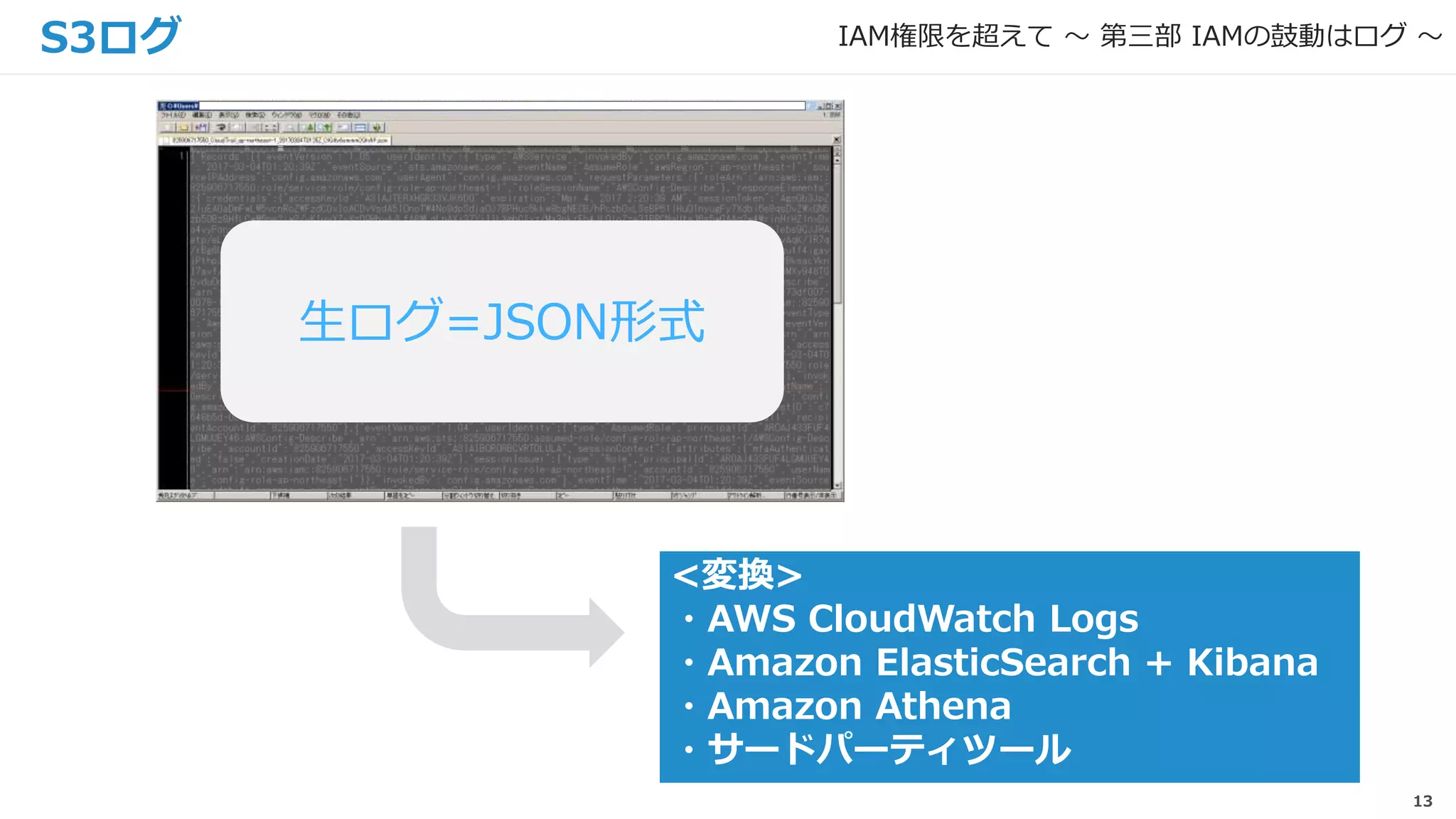
13 S3ログ <変換> ・AWS CloudWatch Logs ・Amazon
ElasticSearch + Kibana ・Amazon Athena ・サードパーティツール 生ログ=JSON形式 IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
15.
14 生ログをExcel形式に変換 eventTime awsRegion eventSource
eventName userNamesourceIPAddress userAgent requestParameters 2017-03-03T00:33:52Z ap-northeast-1 ds.amazonaws.com DescribeDirectories hoge 10.143.35.20 signin.amazonaws.com {"includeIdentityPools":false} 2017-03-03T00:32:57Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.240.200.10 signin.amazonaws.com null 2017-03-03T00:32:56Z ap-northeast-1 signin.amazonaws.com CheckMfa hoge 10.143.35.20 Mozilla/5.0 (Windows 2017-03-03T00:32:56Z ap-northeast-1 signin.amazonaws.com ConsoleLogin hoge 10.143.35.20 Mozilla/5.0 (Windows 2017-03-03T00:34:24Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.143.35.20 signin.amazonaws.com {"pageSize":300} 2017-03-03T00:33:09Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.20 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:28:50Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.143.35.11 signin.amazonaws.com {"pageSize":300} 2017-03-03T06:27:38Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:27:18Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.240.200.201 signin.amazonaws.com null 2017-03-03T06:50:06Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:50:37Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:51:40Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:49:03Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:49:34Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:52:11Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:51:09Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:52:42Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:50:45Z ap-northeast-1 s3.amazonaws.com GetBucketVersioning hoge 10.143.35.20 signin.amazonaws.com {"bucketName":"guide-test","versioning":[""]} 2017-03-03T06:49:02Z ap-northeast-1 ec2.amazonaws.com StartInstances hoge 10.143.35.11 signin.amazonaws.com {"instancesSet":{"items":[{"instanceId":"i-b7021812"},{"instanceId":"i-4cdf 2017-03-03T06:57:48Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:56:46Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:56:15Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:55:43Z ap-northeast-1 ec2.amazonaws.com StartInstances hoge 10.143.35.11 signin.amazonaws.com {"instancesSet":{"items":[{"instanceId":"i-0ce7b255859fce9b4"}]}} 2017-03-03T06:55:44Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:57:17Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:58:18Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T06:58:50Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T07:05:14Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T07:04:43Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100} 2017-03-03T07:27:26Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.240.200.201 signin.amazonaws.com null 不正なIP? 繰り返し? まさかroot? IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
16.
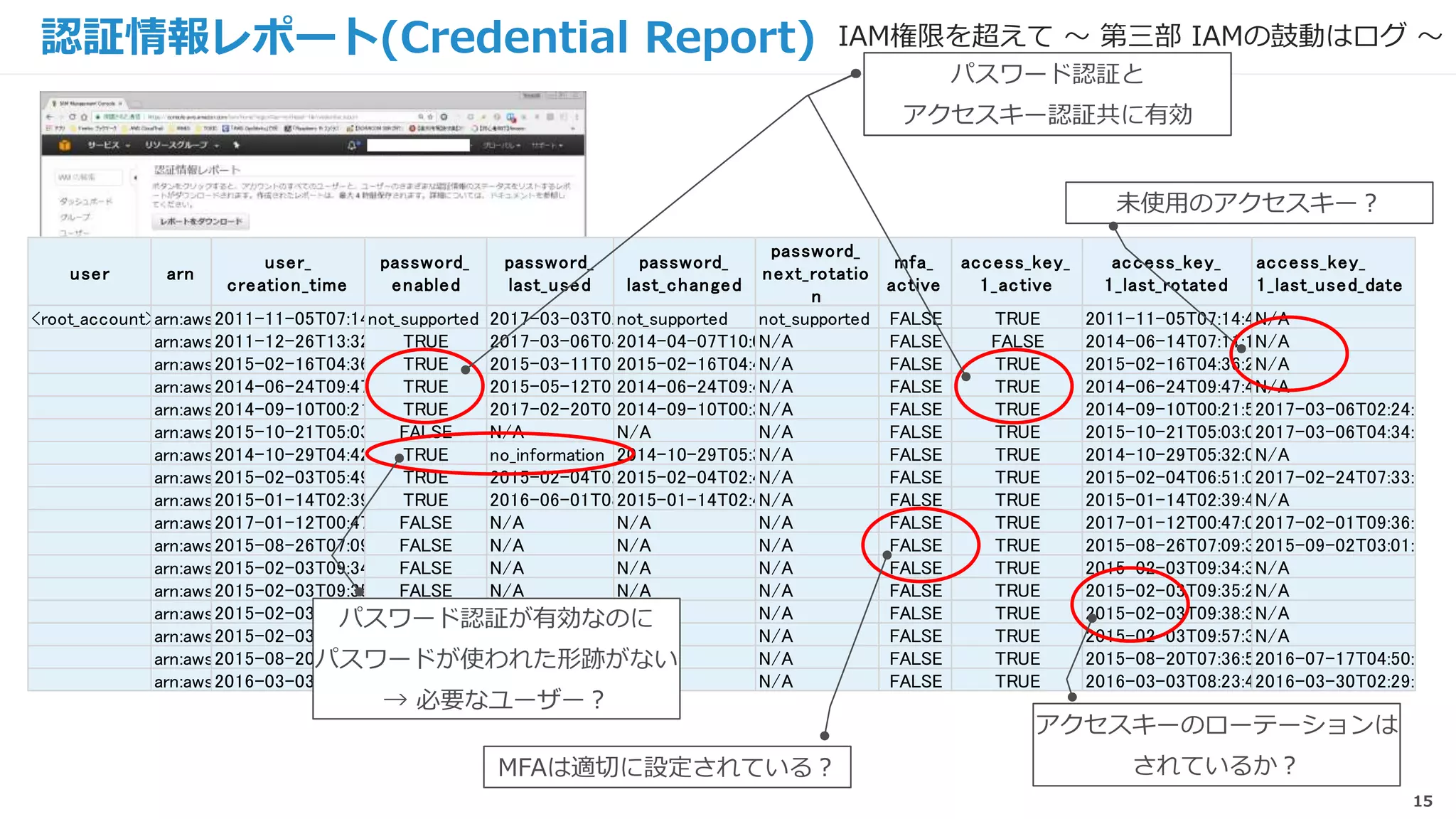
15 認証情報レポート(Credential Report) user arn user_ creation_time password_ enabled password_ last_used password_ last_changed password_ next_rotatio n mfa_ active access_key_ 1_active access_key_ 1_last_rotated access_key_ 1_last_used_date <root_account>arn:aws:iam::825906717550:root2011-11-05T07:14:45+00:00not_supported
2017-03-03T02:57:30+00:00not_supported not_supported FALSE TRUE 2011-11-05T07:14:45+00:00N/A arn:aws:iam::825906717550:user/clp-admin2011-12-26T13:32:48+00:00TRUE 2017-03-06T04:40:13+00:002014-04-07T10:01:07+00:00N/A FALSE FALSE 2014-06-14T07:11:13+00:00N/A arn:aws:iam::825906717550:user/clp-admin-gl2015-02-16T04:36:29+00:00TRUE 2015-03-11T01:00:32+00:002015-02-16T04:40:04+00:00N/A FALSE TRUE 2015-02-16T04:36:29+00:00N/A arn:aws:iam::825906717550:user/clp-admin-hs2014-06-24T09:47:40+00:00TRUE 2015-05-12T01:23:15+00:002014-06-24T09:49:14+00:00N/A FALSE TRUE 2014-06-24T09:47:40+00:00N/A arn:aws:iam::825906717550:user/clp-admin-kb2014-09-10T00:21:50+00:00TRUE 2017-02-20T01:26:07+00:002014-09-10T00:34:47+00:00N/A FALSE TRUE 2014-09-10T00:21:50+00:002017-03-06T02:24:00+00 arn:aws:iam::825906717550:user/clp-awscli-kb2015-10-21T05:03:07+00:00FALSE N/A N/A N/A FALSE TRUE 2015-10-21T05:03:07+00:002017-03-06T04:34:00+00 arn:aws:iam::825906717550:user/clp-user-license2014-10-29T04:42:19+00:00TRUE no_information 2014-10-29T05:35:32+00:00N/A FALSE TRUE 2014-10-29T05:32:06+00:00N/A arn:aws:iam::825906717550:user/clp-user-nintei2015-02-03T05:49:04+00:00TRUE 2015-02-04T02:45:04+00:002015-02-04T02:44:53+00:00N/A FALSE TRUE 2015-02-04T06:51:06+00:002017-02-24T07:33:00+00 arn:aws:iam::825906717550:user/clp-user-saptest2015-01-14T02:39:46+00:00TRUE 2016-06-01T08:16:39+00:002015-01-14T02:41:41+00:00N/A FALSE TRUE 2015-01-14T02:39:46+00:00N/A arn:aws:iam::825906717550:user/clp-user-sol-dtest2017-01-12T00:47:04+00:00FALSE N/A N/A N/A FALSE TRUE 2017-01-12T00:47:05+00:002017-02-01T09:36:00+00 arn:aws:iam::825906717550:user/clp-user-sol-test2015-08-26T07:09:36+00:00FALSE N/A N/A N/A FALSE TRUE 2015-08-26T07:09:36+00:002015-09-02T03:01:00+00 arn:aws:iam::825906717550:user/AWS/OpsWorks/OpsWorks-opsworks_test_2-i-583a96942015-02-03T09:34:31+00:00FALSE N/A N/A N/A FALSE TRUE 2015-02-03T09:34:33+00:00N/A arn:aws:iam::825906717550:user/AWS/OpsWorks/OpsWorks-opsworks_test_2-ip-10-0-0-2...te.internal2015-02-03T09:35:25+00:00FALSE N/A N/A N/A FALSE TRUE 2015-02-03T09:35:27+00:00N/A arn:aws:iam::825906717550:user/AWS/OpsWorks/OpsWorks-opsworks_test_2-ip-10-0-0-2...te.internal+12015-02-03T09:38:33+00:00FALSE N/A N/A N/A FALSE TRUE 2015-02-03T09:38:34+00:00N/A arn:aws:iam::825906717550:user/AWS/OpsWorks/OpsWorks-opsworks_test_2-ip-10-0-0-2...te.internal+22015-02-03T09:57:32+00:00FALSE N/A N/A N/A FALSE TRUE 2015-02-03T09:57:33+00:00N/A arn:aws:iam::825906717550:user/pie0012015-08-20T07:36:52+00:00FALSE N/A N/A N/A FALSE TRUE 2015-08-20T07:36:52+00:002016-07-17T04:50:00+00 arn:aws:iam::825906717550:user/solution-pattern-eval2016-03-03T08:23:42+00:00FALSE N/A N/A N/A FALSE TRUE 2016-03-03T08:23:42+00:002016-03-30T02:29:00+00 パスワード認証と アクセスキー認証共に有効 パスワード認証と アクセスキー認証共に有効 パスワード認証が有効なのに パスワードが使われた形跡がない → 必要なユーザー? アクセスキーのローテーションは されているか?MFAは適切に設定されている? 未使用のアクセスキー? IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜
17.
16 まとめ ① IAMベストプラクティス、セキュリティホワイトペーパーは必読。 ② まずはログ収集から CloudTrail、Configのログ出力はオンにしましょう。 ③
普段からログは見ておきましょう。 いきなり見てもうろたえます。 ④ ログの保全もお忘れなく。 ログがなくなると途方にくれてしまいます。あとS3の課金にも注意。 ⑤ IAMは設定して終わりではありません。 セキュリティ要件を明確にして、実運用にのっけるのが大変! IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜 Fin.
18.
17 Enjoy IAM Life! Thank
you. 『IAMは、IAMは権限なんだ。 IAMは、このAWS(クラウド)を 支えてるものなんだ!』
Download


![14
生ログをExcel形式に変換
eventTime awsRegion eventSource eventName userNamesourceIPAddress userAgent requestParameters
2017-03-03T00:33:52Z ap-northeast-1 ds.amazonaws.com DescribeDirectories hoge 10.143.35.20 signin.amazonaws.com {"includeIdentityPools":false}
2017-03-03T00:32:57Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.240.200.10 signin.amazonaws.com null
2017-03-03T00:32:56Z ap-northeast-1 signin.amazonaws.com CheckMfa hoge 10.143.35.20 Mozilla/5.0 (Windows
2017-03-03T00:32:56Z ap-northeast-1 signin.amazonaws.com ConsoleLogin hoge 10.143.35.20 Mozilla/5.0 (Windows
2017-03-03T00:34:24Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.143.35.20 signin.amazonaws.com {"pageSize":300}
2017-03-03T00:33:09Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.20 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:28:50Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.143.35.11 signin.amazonaws.com {"pageSize":300}
2017-03-03T06:27:38Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:27:18Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.240.200.201 signin.amazonaws.com null
2017-03-03T06:50:06Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:50:37Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:51:40Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:49:03Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:49:34Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:52:11Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:51:09Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:52:42Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:50:45Z ap-northeast-1 s3.amazonaws.com GetBucketVersioning hoge 10.143.35.20 signin.amazonaws.com {"bucketName":"guide-test","versioning":[""]}
2017-03-03T06:49:02Z ap-northeast-1 ec2.amazonaws.com StartInstances hoge 10.143.35.11 signin.amazonaws.com {"instancesSet":{"items":[{"instanceId":"i-b7021812"},{"instanceId":"i-4cdf
2017-03-03T06:57:48Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:56:46Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:56:15Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:55:43Z ap-northeast-1 ec2.amazonaws.com StartInstances hoge 10.143.35.11 signin.amazonaws.com {"instancesSet":{"items":[{"instanceId":"i-0ce7b255859fce9b4"}]}}
2017-03-03T06:55:44Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:57:17Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:58:18Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T06:58:50Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T07:05:14Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T07:04:43Z ap-northeast-1 monitoring.amazonaws.com DescribeAlarms hoge 10.143.35.11 signin.amazonaws.com {"maxRecords":100}
2017-03-03T07:27:26Z ap-northeast-1 elasticloadbalancing.amazonaws.com DescribeLoadBalancers hoge 10.240.200.201 signin.amazonaws.com null
不正なIP?
繰り返し?
まさかroot?
IAM権限を超えて 〜 第三部 IAMの鼓動はログ 〜](https://image.slidesharecdn.com/deepdiveiam-170312143859/75/JAWS-DAYS-2017-Deep-Dive-IAM-IAM-15-2048.jpg)








![[JAWS DAYS 2017 ワークショップ] 不安で夜眠れないAWSアカウント管理者に送る処方箋という名のハンズオン](https://cdn.slidesharecdn.com/ss_thumbnails/20170311jawsdays2017h1-170311030315-thumbnail.jpg?width=640&height=640&fit=bounds)


![JAWS DAYS 2017 [AWSワークショップ] AWS初心者いらっしゃい](https://cdn.slidesharecdn.com/ss_thumbnails/aws-170312220924-thumbnail.jpg?width=640&height=640&fit=bounds)




















![[AWSマイスターシリーズ]Identity and Access Management (IAM)](https://cdn.slidesharecdn.com/ss_thumbnails/20130716aws-meister-regenerate-iam-public-130728224341-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)











![[!注意! 2013年2月時点の資料] Amazon Web Services (AWS)について](https://cdn.slidesharecdn.com/ss_thumbnails/aws-201302-komuro-131104021442-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)









