Download as PDF, PPTX

![CBPERIPHERIALMANAGER
// CBPeripherialManager
//
// .add(CBService)
// .startAdvertising()
// .stopAdvertisting()
class MyPeripheralManagerDelegate: NSObject, CBPeripheralManagerDelegate {
func peripheralManagerDidUpdateState(_ peripheral: CBPeripheralManager) { }
func peripheralManagerDidStartAdvertising(_ peripheral: CBPeripheralManager, error: Error?) { }
func peripheralManager(_ peripheral: CBPeripheralManager, didReceiveRead request: CBATTRequest) { }
func peripheralManager(_ peripheral: CBPeripheralManager, didReceiveWrite requests: [CBATTRequest]) { }
// Not used in simulator
func peripheralManager(_ peripheral: CBPeripheralManager, didAdd service: CBService, error: Error?) { }
func peripheralManager(_ peripheral: CBPeripheralManager, willRestoreState dict: [String : Any]) { }
func peripheralManager(_ peripheral: CBPeripheralManager, central: CBCentral, didSubscribeTo characteristic:
CBCharacteristic) { }
func peripheralManager(_ peripheral: CBPeripheralManager, central: CBCentral, didUnsubscribeFrom characteristic:
CBCharacteristic) { }
func peripheralManagerIsReady(toUpdateSubscribers peripheral: CBPeripheralManager) { }
}](https://image.slidesharecdn.com/woodpeckerrobotble-171011041200/75/iOS-Bluetooth-Low-Energy-BLE-Remote-Robot-Interface-14-2048.jpg)
![CBCENTRALMANAGER
// CBCentralManager
//
// .scanForPeripherals(<adv data>)
// .stopScan()
// .connect(CBPeripherial)
// .cancelPeripheralConnection(CBPeripheral)
class MyCentralDelegate : NSObject, CBCentralManagerDelegate {
func centralManagerDidUpdateState(_ central: CBCentralManager) {}
func centralManager(_ central: CBCentralManager, didDiscover peripheral: CBPeripheral, advertisementData: [String : Any],
rssi RSSI: NSNumber) {}
func centralManager(_ central: CBCentralManager, didConnect peripheral: CBPeripheral) {}
func centralManager(_ central: CBCentralManager, didFailToConnect peripheral: CBPeripheral, error: Error?) {}
func centralManager(_ central: CBCentralManager, didDisconnectPeripheral peripheral: CBPeripheral, error: Error?) {}
// Not used in Remote Control
func centralManager(_ central: CBCentralManager, willRestoreState dict: [String : Any]) {}
}](https://image.slidesharecdn.com/woodpeckerrobotble-171011041200/75/iOS-Bluetooth-Low-Energy-BLE-Remote-Robot-Interface-17-2048.jpg)
![CBPERIPHERAL
// CBPeripheral
//
// .discoverServices([CBUUID] or nil for all services)
// .discoverCharacteristics([CBUUID])
// .setNotifyValue()
// .readValue()
// .writeValue()
class MyPeripheralDelegate : NSObject, CBPeripheralDelegate {
func peripheral(_ peripheral: CBPeripheral, didDiscoverServices error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didDiscoverCharacteristicsFor service: CBService, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didWriteValueFor characteristic: CBCharacteristic, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didUpdateValueFor characteristic: CBCharacteristic, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didReadRSSI RSSI: NSNumber, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didWriteValueFor descriptor: CBDescriptor, error: Error?) {}
// Not used in Remote Control
func peripheralDidUpdateName(_ peripheral: CBPeripheral) {}
func peripheral(_ peripheral: CBPeripheral, didUpdateValueFor descriptor: CBDescriptor, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didModifyServices invalidatedServices: [CBService]) {}
func peripheral(_ peripheral: CBPeripheral, didDiscoverIncludedServicesFor service: CBService, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didDiscoverDescriptorsFor characteristic: CBCharacteristic, error: Error?) {}
func peripheral(_ peripheral: CBPeripheral, didUpdateNotificationStateFor characteristic: CBCharacteristic, error: Error?) {}
}](https://image.slidesharecdn.com/woodpeckerrobotble-171011041200/75/iOS-Bluetooth-Low-Energy-BLE-Remote-Robot-Interface-18-2048.jpg)

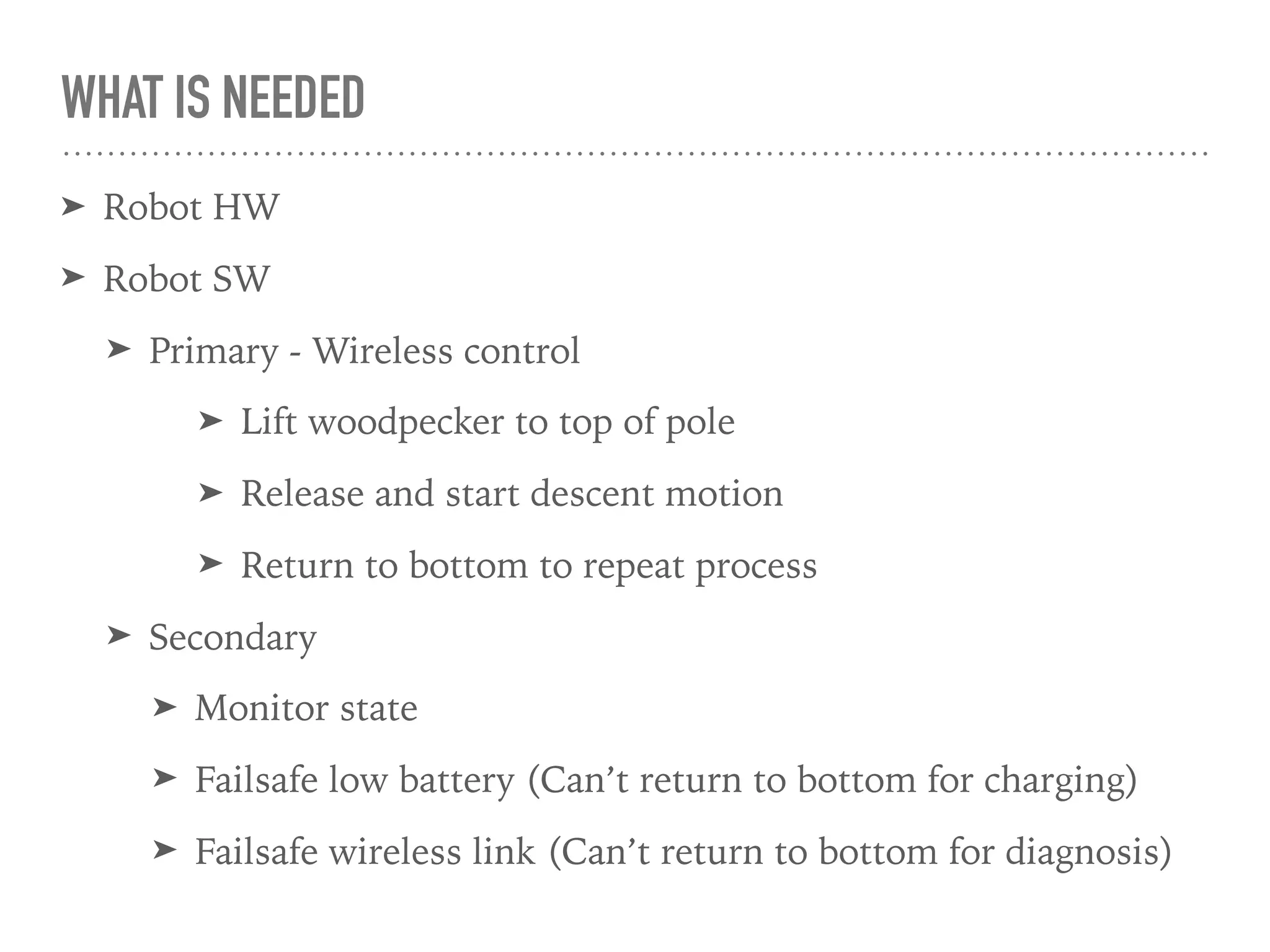
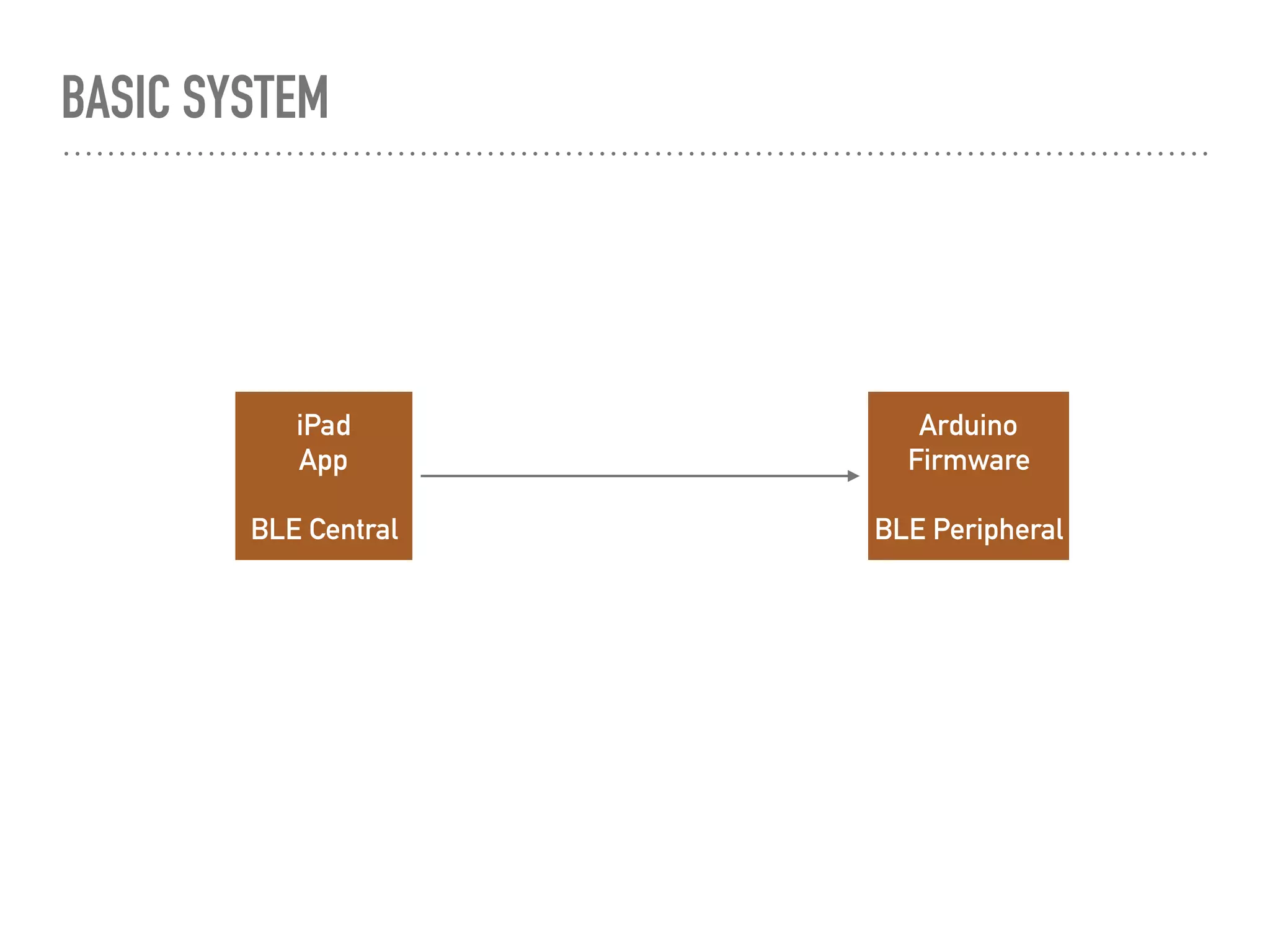
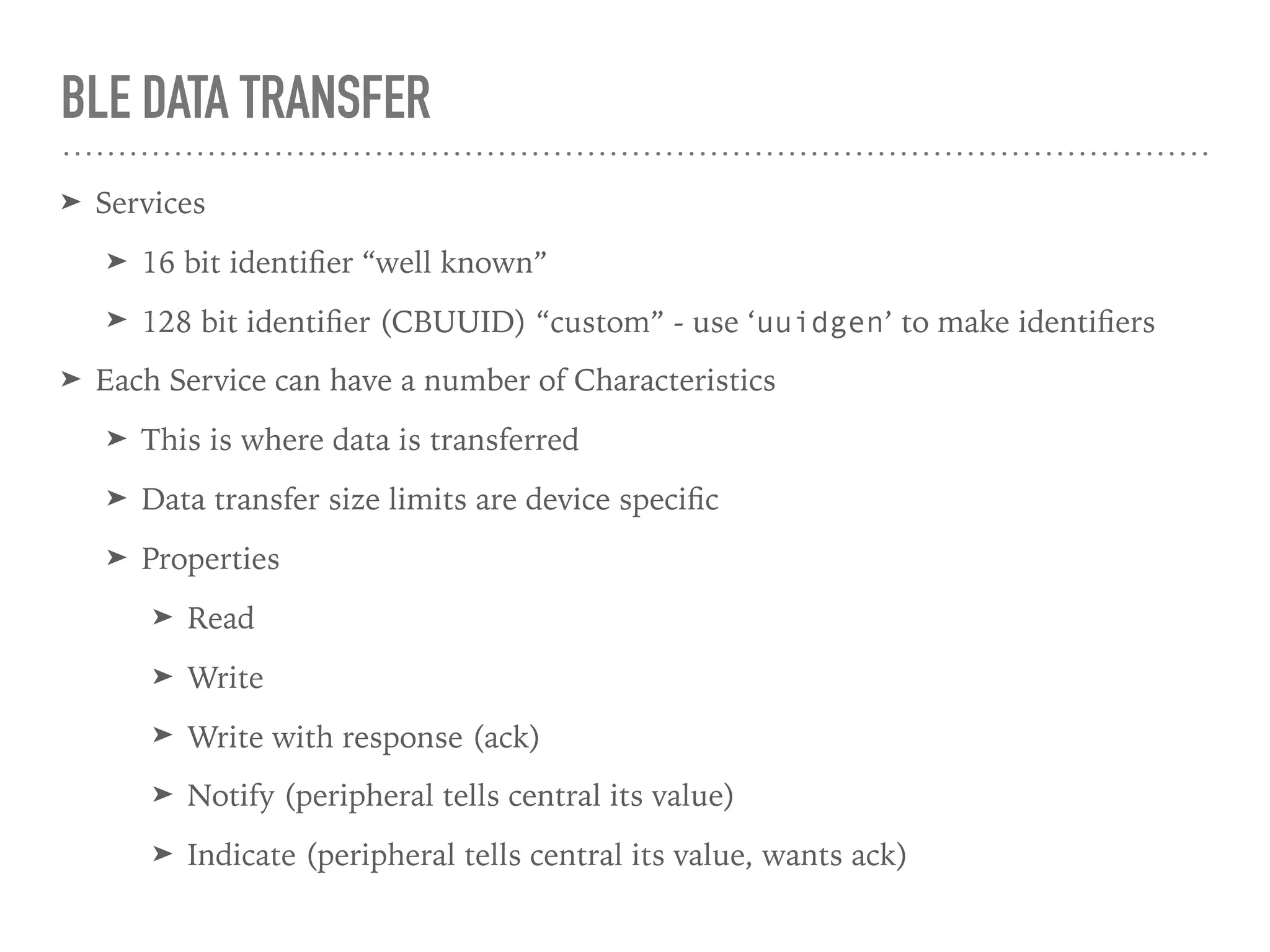
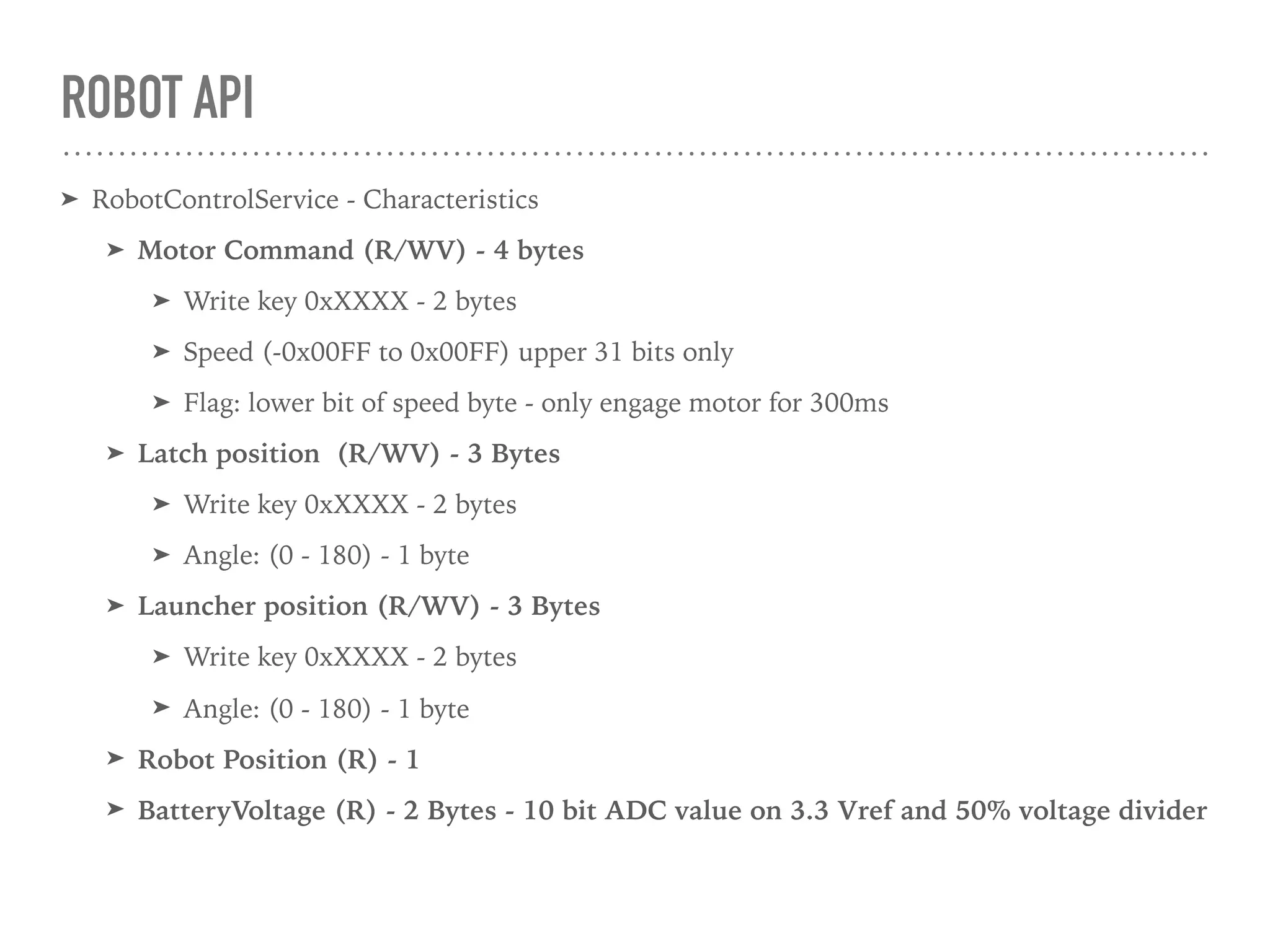
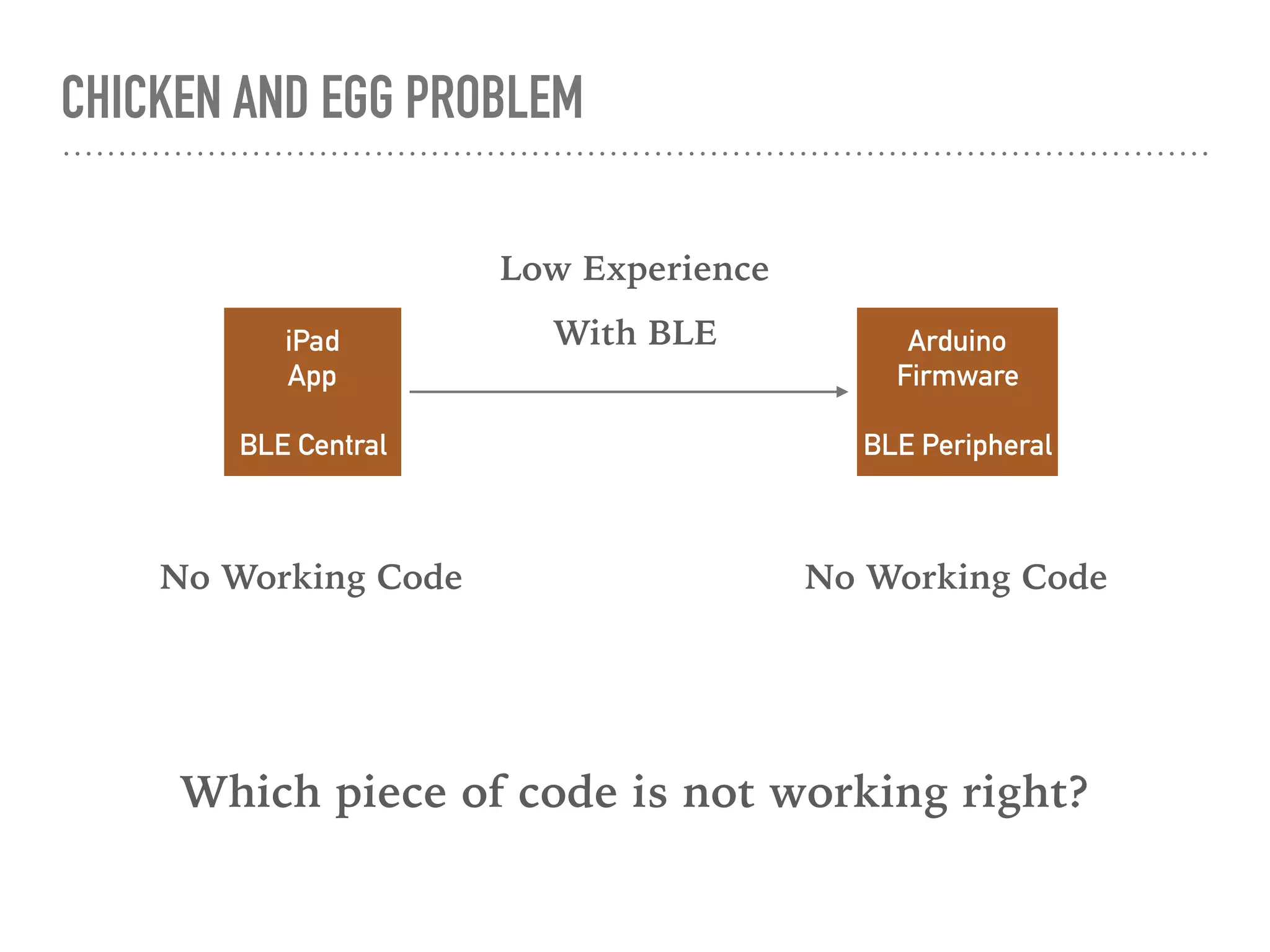
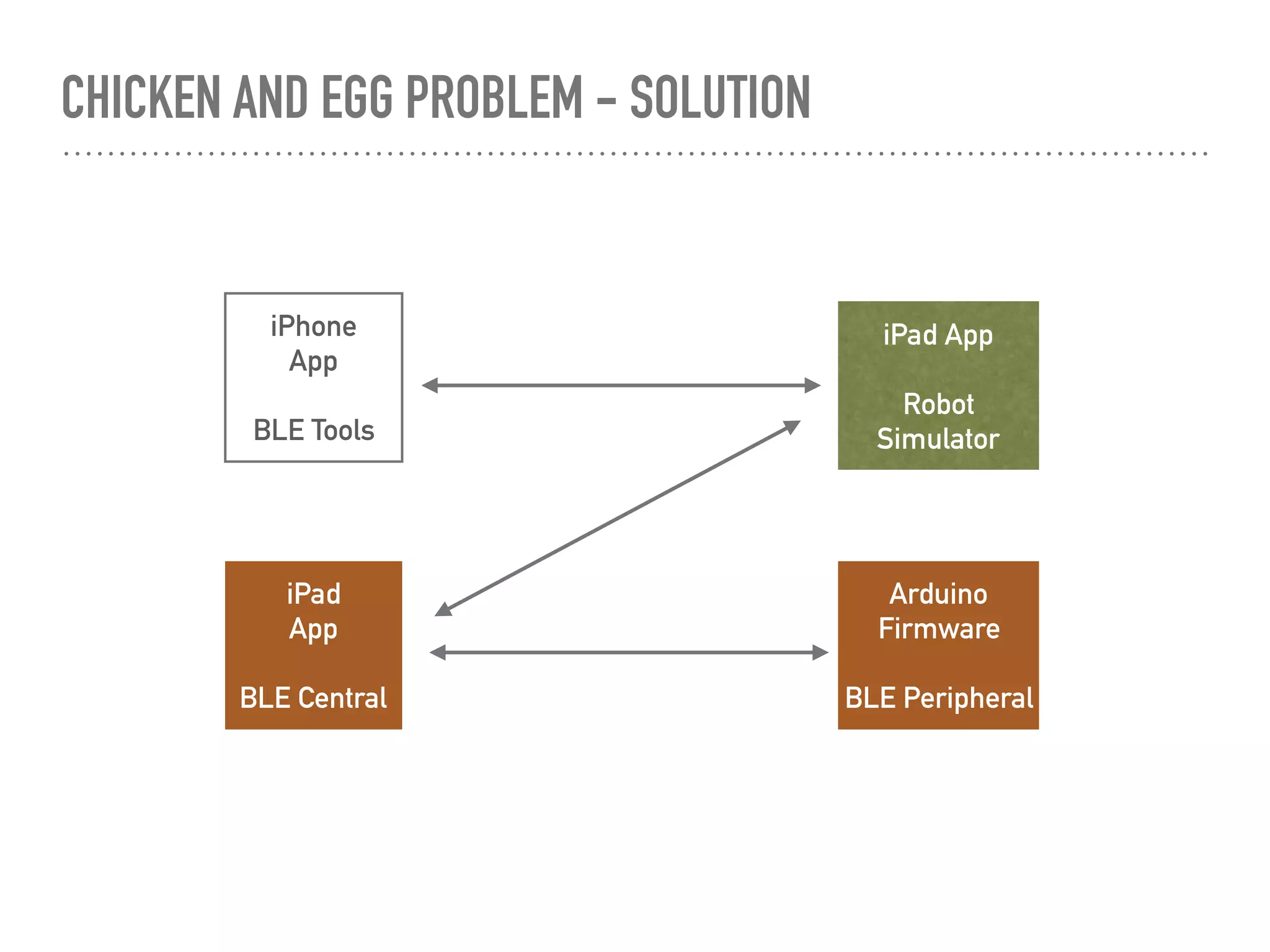
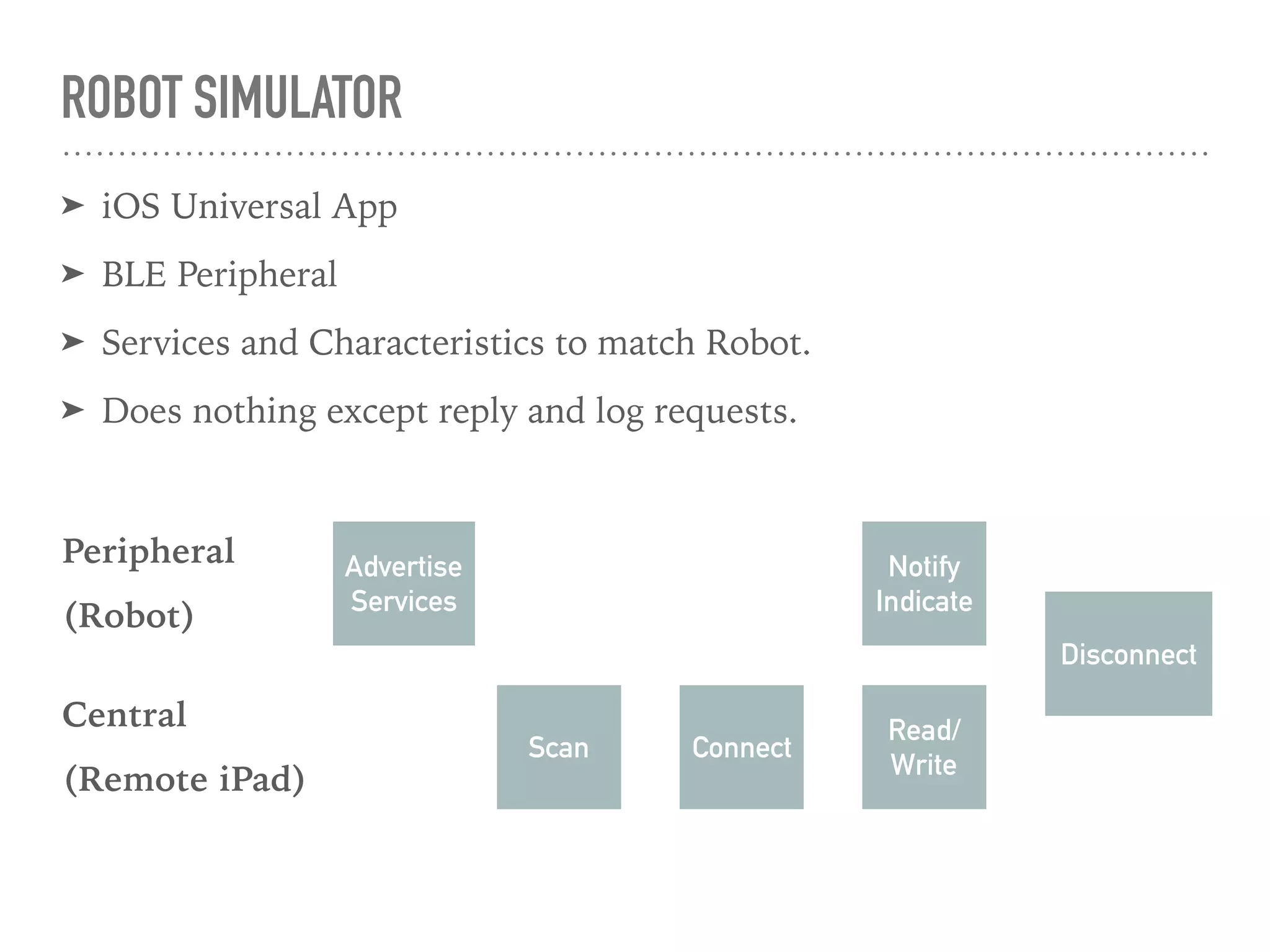
This document outlines a project to control a woodpecker toy robot via an iOS app using Bluetooth Low Energy (BLE). It describes the robot's hardware and software requirements, including motor control, wireless communication, and state monitoring. Additionally, it provides technical details on data transfer using BLE, the robot's API, and references tools and resources for implementation.




![I am the 100% [*] by Chris Evans & Natalie Silvanovich](https://cdn.slidesharecdn.com/ss_thumbnails/chrisevansnataliesilvanovich-iamthe100-150722214423-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)