Learning to PredictWithout Looking Ahead:
World Model Without Forward Prediction
• 人間はあらゆるものを知覚しているわけではないという仮説から、外界
からの刺激を元に外界世界をシミュレートする”World Model”を構築する
• ”World Model”は外界世界の抽象表現を獲得し、潜在空間にて未来状態を
予測し、最適行動選択をする。これをVAEやRNNによって実現していた。
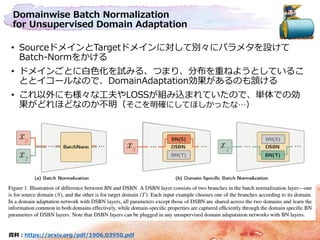
• 確率pで実環境か抽象表現のどちらかを観測するObservational Dropout
を新規提案。
• 直感的な理解としては、抽象表現=自分が想像した環境なので、確率p
で観測される実環境とのGAPを埋めようと勝手に学習してくれる寸法。
In doing so, we can coerce an agent into learning a world model
to fill in the observation gaps seen during reinforcement learning
without having to explicitly train the world model via teacher forcing.
















![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)

![[ICML2019読み会in京都] Agnostic Federated Learning](https://cdn.slidesharecdn.com/ss_thumbnails/roadrolleragnosticfederatedlearning-190804065508-thumbnail.jpg?width=640&height=640&fit=bounds)










![[DL輪読会] “Asymmetric Tri-training for Unsupervised Domain Adaptation (ICML2017...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks20170728-170728025901-thumbnail.jpg?width=640&height=640&fit=bounds)










![[ICML2019読み会in京都] (LT)Bayesian Nonparametric Federated Learning of Neural Net...](https://cdn.slidesharecdn.com/ss_thumbnails/roadrollerbayesiannonparametricfederatedlearningofneuralnetworks-190804070640-thumbnail.jpg?width=640&height=640&fit=bounds)

![ICLR'19 読み会 in 京都 [LT枠] Domain Adaptationの研究動向](https://cdn.slidesharecdn.com/ss_thumbnails/iclr19inkyotolt-190528091335-thumbnail.jpg?width=640&height=640&fit=bounds)