Download to read offline
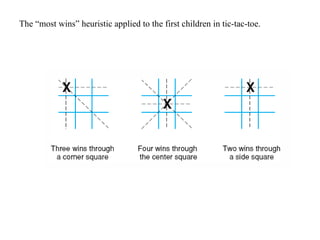



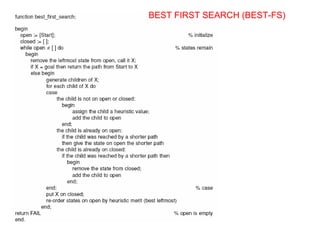
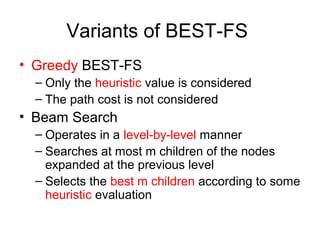
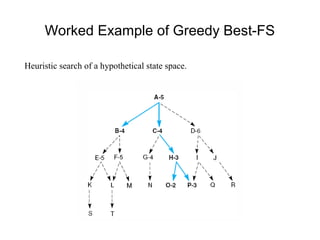
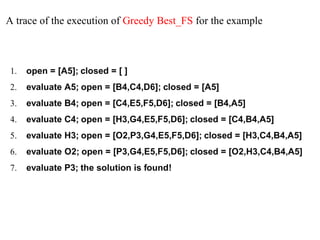
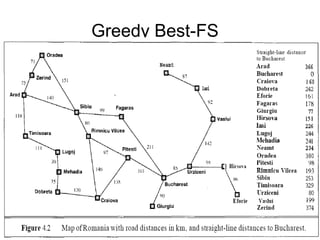
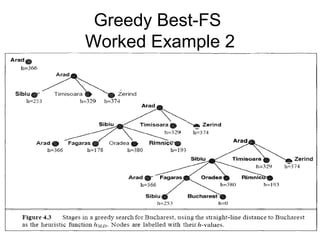
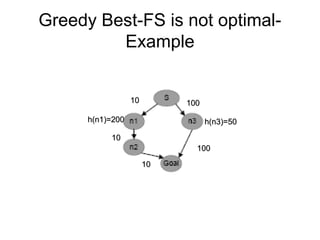
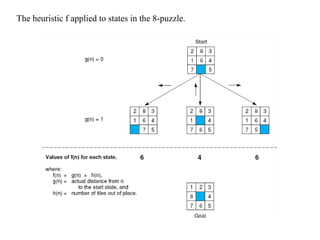
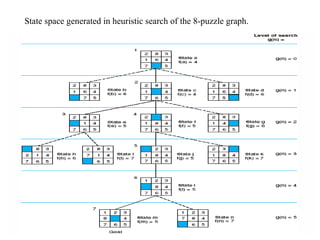

Heuristics are rules used in informed search algorithms to efficiently navigate state spaces toward solutions, especially when exact solutions are infeasible or too costly to compute. Various heuristic methodologies exist, including hill climbing and best-first search, each with its own advantages and limitations, such as the tendency of hill climbing to get stuck in local maxima. The A* search algorithm improves heuristic evaluation by combining the actual path length with an admissible heuristic estimate to better guide the search toward optimal solutions.