GAIT ANALYSIS - Normal Gait, Abnormal walking styles
1.
GAIT PATTERNS INHIP
GAIT PATTERNS IN HIP
DISORDERS
DISORDERS
DEPARTMENT OF ORTHOPAEDICS
DEPARTMENT OF ORTHOPAEDICS
VELS MEDICAL COLLEGE AND
VELS MEDICAL COLLEGE AND
HOSPITAL
HOSPITAL
2.
Normal gait
Normal gaitDefinition
Definition
Gait analysis
Gait analysis
Pathological gait
Pathological gait Spastic gait
Spastic gait
Antalgic gait
Antalgic gait
Trendelenberg gait
Trendelenberg gait
Short limb gait
Short limb gait
Gluteus maximus gait
Gluteus maximus gait
gait in bilateral hip problems
gait in bilateral hip problems
3.
Normal Gait
Normal Gait
Definition
Definition
Humangait is bipedal,
Human gait is bipedal,
biphasic,
biphasic,
forward propulsion
forward propulsion
of centre of gravity
of centre of gravity,
,
in which there is alternate
in which there is alternate
sinuous movement of head and
sinuous movement of head and
body,
body, with least expenditure of
with least expenditure of
energy
energy
4.
Normal Gait
Normal Gait
Definition
Definition
Humangait is bipedal, biphasic,
Human gait is bipedal, biphasic,
forward propulsion of centre of
forward propulsion of centre of
gravity, in which there is alternate
gravity, in which there is alternate
sinuous movement of head and body,
sinuous movement of head and body,
with least expenditure of energy.
with least expenditure of energy.
5.
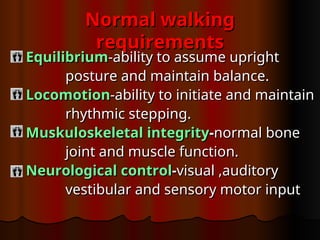
Normal walking
Normal walking
requirements
requirements
Equilibrium
Equilibrium-abilityto assume upright
-ability to assume upright
posture and maintain balance.
posture and maintain balance.
Locomotion
Locomotion-ability to initiate and maintain
-ability to initiate and maintain
rhythmic stepping.
rhythmic stepping.
Muskuloskeletal
Muskuloskeletal integrity
integrity-
-normal bone
normal bone
joint and muscle function.
joint and muscle function.
Neurological
Neurological control
control-
-visual ,auditory
visual ,auditory
vestibular and sensory motor input
vestibular and sensory motor input
6.
GAIT ANALYSIS
GAIT ANALYSIS
Study of human locomotion
Study of human locomotion
Walking consists of a series of gait
Walking consists of a series of gait
cycles
cycles
A single gait cycle is known as a STRIDE
A single gait cycle is known as a STRIDE
7.
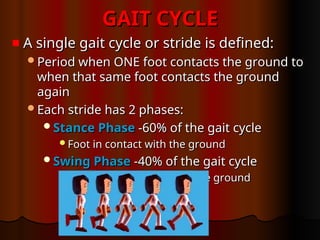
GAIT CYCLE
GAIT CYCLE
Asingle gait cycle or stride is defined:
A single gait cycle or stride is defined:
Period when ONE foot contacts the ground to
Period when ONE foot contacts the ground to
when that same foot contacts the ground
when that same foot contacts the ground
again
again
Each stride has 2 phases:
Each stride has 2 phases:
Stance Phase
Stance Phase -60% of the gait cycle
-60% of the gait cycle
Foot in contact with the ground
Foot in contact with the ground
Swing Phase
Swing Phase -40% of the gait cycle
-40% of the gait cycle
Foot NOT in contact with the ground
Foot NOT in contact with the ground
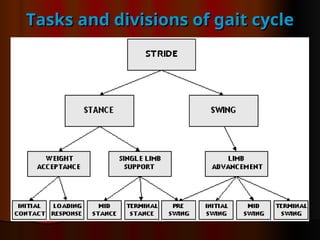
8.
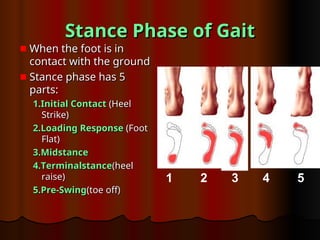
Stance Phase ofGait
Stance Phase of Gait
When the foot is in
When the foot is in
contact with the ground
contact with the ground
Stance phase has 5
Stance phase has 5
parts:
parts:
1.Initial Contact
1.Initial Contact (Heel
(Heel
Strike)
Strike)
2.Loading Response
2.Loading Response (Foot
(Foot
Flat)
Flat)
3.Midstance
3.Midstance
4.Terminalstance
4.Terminalstance(heel
(heel
raise)
raise)
5.Pre-Swing
5.Pre-Swing(toe off)
(toe off)
1 2 3 4 5
9.
Initial Contact
Initial Contact
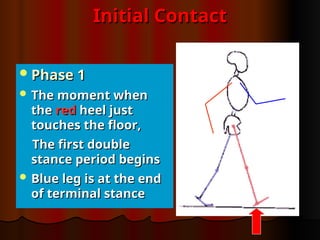
Phase1
Phase 1
The moment when
The moment when
the
the red
red heel just
heel just
touches the floor,
touches the floor,
The first double
The first double
stance period begins
stance period begins
Blue leg is at the end
Blue leg is at the end
of terminal stance
of terminal stance
10.
Loading Response
Loading Response
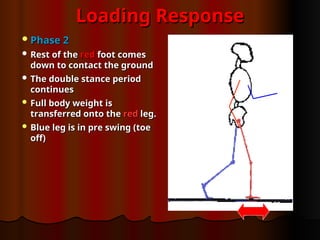
Phase2
Phase 2
Rest of the
Rest of the red
red foot comes
foot comes
down to contact the ground
down to contact the ground
The double stance period
The double stance period
continues
continues
Full body weight is
Full body weight is
transferred onto the
transferred onto the red
red leg.
leg.
Blue leg is in pre swing (toe
Blue leg is in pre swing (toe
off)
off)
11.
Midstance
Midstance
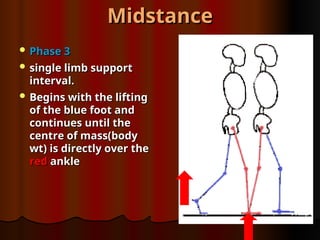
Phase 3
Phase3
single limb support
single limb support
interval.
interval.
Begins with the lifting
Begins with the lifting
of the blue foot and
of the blue foot and
continues until the
continues until the
centre of mass(body
centre of mass(body
wt) is directly over the
wt) is directly over the
red
red ankle
ankle
12.
Terminal Stance
Terminal Stance
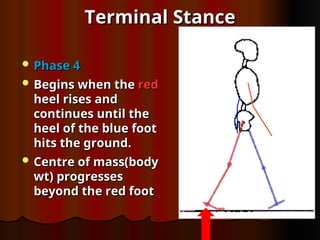
Phase 4
Phase 4
Begins when the
Begins when the red
red
heel rises and
heel rises and
continues until the
continues until the
heel of the blue foot
heel of the blue foot
hits the ground.
hits the ground.
Centre of mass(body
Centre of mass(body
wt) progresses
wt) progresses
beyond the red foot
beyond the red foot
13.
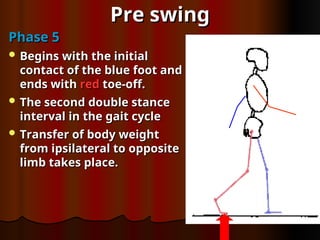
Pre swing
Pre swing
Phase5
Phase 5
Begins with the initial
Begins with the initial
contact of the blue foot and
contact of the blue foot and
ends with
ends with red
red toe-off.
toe-off.
The second double stance
The second double stance
interval in the gait cycle
interval in the gait cycle
Transfer of body weight
Transfer of body weight
from ipsilateral to opposite
from ipsilateral to opposite
limb takes place.
limb takes place.
14.
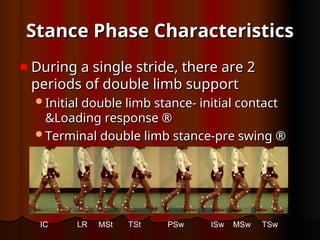
Stance Phase Characteristics
StancePhase Characteristics
During a single stride, there are 2
During a single stride, there are 2
periods of double limb support
periods of double limb support
Initial double limb stance- initial contact
Initial double limb stance- initial contact
&Loading response ®
&Loading response ®
Terminal double limb stance-pre swing ®
Terminal double limb stance-pre swing ®
IC LR MSt TSt PSw ISw MSw TSw
15.
Swing Phase
Swing Phase
Whenfoot is NOT contacting the
When foot is NOT contacting the
ground
ground
Limb advancement phase
Limb advancement phase
3 parts of swing phase:
3 parts of swing phase:
-Initial swing
-Initial swing
-Midswing
-Midswing
-Terminal swing
-Terminal swing
16.
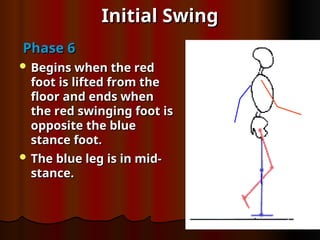
Initial Swing
Initial Swing
Phase6
Phase 6
Begins when the red
Begins when the red
foot is lifted from the
foot is lifted from the
floor and ends when
floor and ends when
the red swinging foot is
the red swinging foot is
opposite the blue
opposite the blue
stance foot.
stance foot.
The blue leg is in mid-
The blue leg is in mid-
stance.
stance.
17.
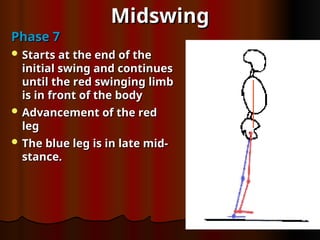
Midswing
Midswing
Phase 7
Phase 7
Starts at the end of the
Starts at the end of the
initial swing and continues
initial swing and continues
until the red swinging limb
until the red swinging limb
is in front of the body
is in front of the body
Advancement of the red
Advancement of the red
leg
leg
The blue leg is in late mid-
The blue leg is in late mid-
stance.
stance.
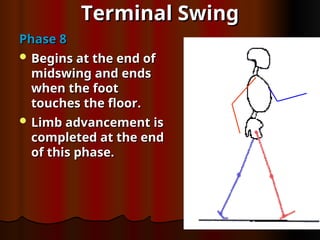
18.
Terminal Swing
Terminal Swing
Phase8
Phase 8
Begins at the end of
Begins at the end of
midswing and ends
midswing and ends
when the foot
when the foot
touches the floor.
touches the floor.
Limb advancement is
Limb advancement is
completed at the end
completed at the end
of this phase.
of this phase.
19.
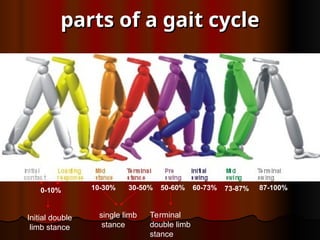
parts of agait cycle
parts of a gait cycle
0-10% 10-30% 30-50% 50-60% 60-73% 73-87% 87-100%
Initial double
limb stance
single limb
stance
Terminal
double limb
stance
20.
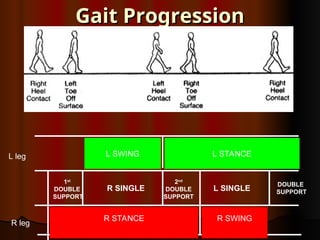
Gait Progression
Gait Progression
Rleg
L leg
R STANCE
L SINGLE
1st
DOUBLE
SUPPORT
2nd
DOUBLE
SUPPORT
DOUBLE
SUPPORT
R SINGLE
L SWING L STANCE
R SWING
R STANCE
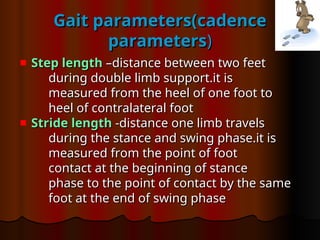
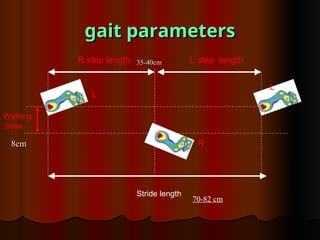
Gait parameters(cadence
Gait parameters(cadence
parameters
parameters)
)
Steplength
Step length –distance between two feet
–distance between two feet
during double limb support.it is
during double limb support.it is
measured from the heel of one foot to
measured from the heel of one foot to
heel of contralateral foot
heel of contralateral foot
Stride length
Stride length -distance one limb travels
-distance one limb travels
during the stance and swing phase.it is
during the stance and swing phase.it is
measured from the point of foot
measured from the point of foot
contact at the beginning of stance
contact at the beginning of stance
phase to the point of contact by the same
phase to the point of contact by the same
foot at the end of swing phase
foot at the end of swing phase
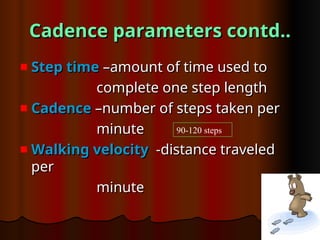
Cadence parameters contd..
Cadenceparameters contd..
Step time
Step time –amount of time used to
–amount of time used to
complete one step length
complete one step length
Cadence
Cadence –number of steps taken per
–number of steps taken per
minute
minute
Walking velocity
Walking velocity -distance traveled
-distance traveled
per
per
minute
minute
90-120 steps
25.
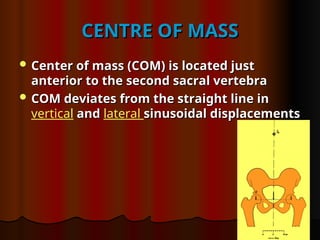
CENTRE OF MASS
CENTREOF MASS
Center of mass (COM) is located just
Center of mass (COM) is located just
anterior to the second sacral vertebra
anterior to the second sacral vertebra
COM deviates from the straight line in
COM deviates from the straight line in
vertical and
and lateral sinusoidal displacements
sinusoidal displacements
26.
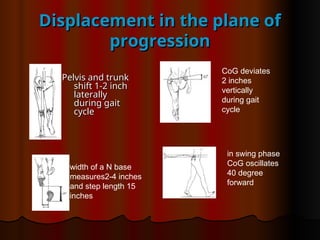
Displacement in theplane of
Displacement in the plane of
progression
progression
Pelvis and trunk
Pelvis and trunk
shift 1-2 inch
shift 1-2 inch
laterally
laterally
during gait
during gait
cycle
cycle
width of a N base
measures2-4 inches
and step length 15
inches
CoG deviates
2 inches
vertically
during gait
cycle
in swing phase
CoG oscillates
40 degree
forward
27.
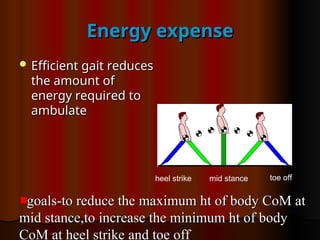
Energy expense
Energy expense
Efficient gait reduces
Efficient gait reduces
the amount of
the amount of
energy required to
energy required to
ambulate
ambulate
heel strike mid stance toe off
goals-to reduce the maximum ht of body CoM at
goals-to reduce the maximum ht of body CoM at
mid stance,to increase the minimum ht of body
mid stance,to increase the minimum ht of body
CoM at heel strike and toe off
CoM at heel strike and toe off
28.
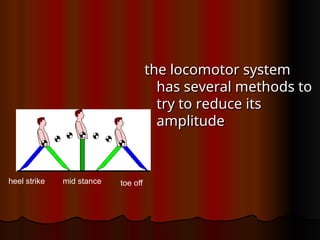
the locomotor system
thelocomotor system
has several methods to
has several methods to
try to reduce its
try to reduce its
amplitude
amplitude
heel strike mid stance toe off
29.
Determinants of gait
Determinantsof gait
Pelvic rotation
Pelvic rotation
Pelvic tilt
Pelvic tilt
Stance phase knee flexion
Stance phase knee flexion
Transverse rotation of leg segment
Transverse rotation of leg segment
Normal valgus alignment of knee
Normal valgus alignment of knee
Ankle rockers
Ankle rockers
30.
Muscle activity duringgait
Muscle activity during gait
Concentric contraction-generates
Concentric contraction-generates
power and accelerates body forward
power and accelerates body forward
-gastrocsoleus contracts to lift the
-gastrocsoleus contracts to lift the
heel off the ground
heel off the ground
-iliopsoas contracts flexing the hip
-iliopsoas contracts flexing the hip
and pulling the stance phase limb
and pulling the stance phase limb
off the ground
off the ground
31.
Muscle activity duringgait
Muscle activity during gait
Eccentric contraction-slows down and
Eccentric contraction-slows down and
stabilises joint motion
stabilises joint motion
-tibialis anterior-contracts at initial
-tibialis anterior-contracts at initial
contact ,firing during plantar flexion
contact ,firing during plantar flexion
as the foot is lowered to ground.
as the foot is lowered to ground.
so the foot is gently lowered to ground
so the foot is gently lowered to ground
-gastrocsoleus-contracts eccentrically
-gastrocsoleus-contracts eccentrically
through the stance phase controlling the
through the stance phase controlling the
rate of dorsiflexion of ankle
rate of dorsiflexion of ankle
32.
KINEMATICS
KINEMATICS
Denotes the motionobserved and
Denotes the motion observed and
measured at pelvis,hip,knee,ankle and
measured at pelvis,hip,knee,ankle and
foot
foot
Done in three planes
Done in three planes
-sagittal plane-hip flexion ,extension
-sagittal plane-hip flexion ,extension
-coronal plane-hip abduction,adduction
-coronal plane-hip abduction,adduction
-transverse plane-rotation hip,tibia,feet
-transverse plane-rotation hip,tibia,feet
33.
CLINICAL GAIT ANALYSIS
CLINICALGAIT ANALYSIS
OBSERVATIONAL GAIT ANALYSIS
OBSERVATIONAL GAIT ANALYSIS
3D GAIT ANALYSIS
3D GAIT ANALYSIS
34.
Obsevational gait analysis
Obsevationalgait analysis
Pt should be viewed from the front,
Pt should be viewed from the front,
side, and behind
side, and behind
hyperlordosis . ankle plantarflexion
hyperlordosis . ankle plantarflexion
dorsi flexion, knee flexion extension,
dorsi flexion, knee flexion extension,
and hip flexion extension. pelvic
and hip flexion extension. pelvic
abduction or adduction.
abduction or adduction.
35.
Observational gait analysis-what
Observationalgait analysis-what
to look for
to look for
The head position.
The head position.
Shoulders - depressed, elevated, protracted, or retracted.
Shoulders - depressed, elevated, protracted, or retracted.
Amount of arm swing - normal, increased, or decreased
Amount of arm swing - normal, increased, or decreased
The trunk - forward or backward lurch or a list to the R or L
The trunk - forward or backward lurch or a list to the R or L
The pelvis -hiked, level, dropped, or fixed.
The pelvis -hiked, level, dropped, or fixed.
The hip - extension, flexion, rotation, circumduction, or an
The hip - extension, flexion, rotation, circumduction, or an
adducted or abducted posture.
adducted or abducted posture.
The knee - flexion, extension, and general stability
The knee - flexion, extension, and general stability
The ankle- plantarflexion and dorsiflexion, eversion and inversion.
The ankle- plantarflexion and dorsiflexion, eversion and inversion.
The foot - proper push off and pronation and supination
The foot - proper push off and pronation and supination
Pain-where and when
Pain-where and when
Cadence,base width,stride length
Cadence,base width,stride length
36.
3D gait analysis
3Dgait analysis
THIS IS DONE IN A GAIT LABORATARY
THIS IS DONE IN A GAIT LABORATARY
37.
3D gait analysis
3Dgait analysis
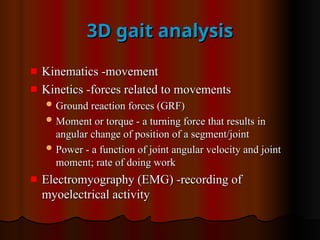
Kinematics -movement
Kinematics -movement
Kinetics -forces related to movements
Kinetics -forces related to movements
Ground reaction forces (GRF)
Ground reaction forces (GRF)
Moment or torque - a turning force that results in
Moment or torque - a turning force that results in
angular change of position of a segment/joint
angular change of position of a segment/joint
Power - a function of joint angular velocity and joint
Power - a function of joint angular velocity and joint
moment; rate of doing work
moment; rate of doing work
Electromyography (EMG) -recording of
Electromyography (EMG) -recording of
myoelectrical activity
myoelectrical activity
Spastic Diplegia /quadriplegia
SpasticDiplegia /quadriplegia
(Sutherlands and Davids)
(Sutherlands and Davids)
True Equinus
True Equinus -distal spasticity
-distal spasticity
Gastrosoleus spasticity Equinus
Gastrosoleus spasticity Equinus
±Genu recurvatum
±Genu recurvatum
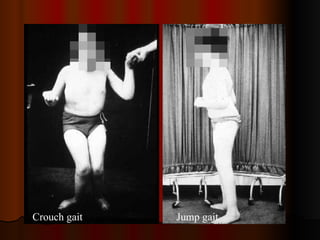
Jump Gait
Jump Gait
Spasticity of hamstrings and hip flexors and calf
Spasticity of hamstrings and hip flexors and calf
Equinus +hip and knee in flexion ,ant. pelvic tilt
Equinus +hip and knee in flexion ,ant. pelvic tilt
+ exaggerated lumbar lordosis+ knee stiff (rectus femoris)
+ exaggerated lumbar lordosis+ knee stiff (rectus femoris)
Crouch gait
Crouch gait
Excessive dorsiflexion or calcaneus at ankle +excessive flexion at knee
Excessive dorsiflexion or calcaneus at ankle +excessive flexion at knee
and hip +ant. pelvic tilt
and hip +ant. pelvic tilt
may be
may be Iatrogenic
Iatrogenic due to isolated lengthening of TA (w/o correcting
due to isolated lengthening of TA (w/o correcting
hamstring & iliopsoas spasm
hamstring & iliopsoas spasm)
)
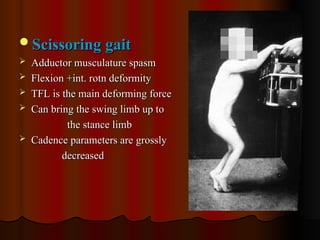
Scissoring gait
Scissoring gait
Adductor musculature spasm
Adductor musculature spasm
Flexion +int. rotn deformity
Flexion +int. rotn deformity
TFL is the main deforming force
TFL is the main deforming force
Can bring the swing limb up to
Can bring the swing limb up to
the stance limb
the stance limb
Cadence parameters are grossly
Cadence parameters are grossly
decreased
decreased
43.
ANTALGIC GAIT
ANTALGIC GAIT
Painin
Pain in
lower limb
lower limb
back
back
--
--hip pain
hip pain Lurch to affected side
Lurch to affected side
Reduce abductor force on hip
Reduce abductor force on hip
No pelvic drop
No pelvic drop
No gluteal weakness
No gluteal weakness
44.
ANTALGIC GAIT
ANTALGIC GAIT
Short stepping
Short stepping
Asymmetrical step length
Asymmetrical step length
Step length on affected side less
Step length on affected side less
Unaffected limb is brought forward
Unaffected limb is brought forward
more quickly than normal in swing
more quickly than normal in swing
phase
phase
Duration of stance phase increased
Duration of stance phase increased
on normal side
on normal side
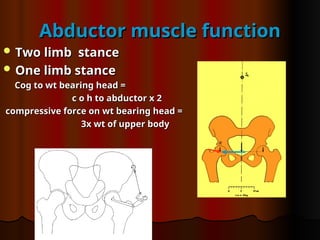
Abductor muscle function
Abductormuscle function
Two limb stance
Two limb stance
One limb stance
One limb stance
Cog to wt bearing head =
Cog to wt bearing head =
c o h to abductor x 2
c o h to abductor x 2
compressive force on wt bearing head =
compressive force on wt bearing head =
3x wt of upper body
3x wt of upper body
47.
In 1895 Fredrich
Trendelenburgdescribed a
clinical sign useful for
detecting the function of hip
abductor muscle with special
referance to CDH and
progressive muscular
dystrophy
48.
TRENDELENBERG GAIT
TRENDELENBERG GAIT
Functional weakening of abductor
Functional weakening of abductor
mechanism.
mechanism.
Abductor muscles at mechanical
Abductor muscles at mechanical
disadvantage
disadvantage
Standing on affected side pelvis drop to
Standing on affected side pelvis drop to
normal side
normal side
To compensate pt lurch to affected side
To compensate pt lurch to affected side
steppage gait
steppage gait
No need to compensate – tilt to opposite side
No need to compensate – tilt to opposite side
TRENDELENBERG GAIT
TRENDELENBERG GAIT
Fulcrum –
Fulcrum – hip joint – DDH
hip joint – DDH
arthritis
arthritis
Lever arm -
Lever arm - head,neck,and shaft
head,neck,and shaft
Congenital coxa vara,
Congenital coxa vara,
#neck, malunited # trochanter
#neck, malunited # trochanter
Power -
Power - abductors
abductors
polio, myopathy etc.
polio, myopathy etc.
51.
SHORT LEG GAIT
SHORTLEG GAIT
Shift to same side
Shift to same side
Pelvis tilt downward with dip
Pelvis tilt downward with dip
Equal period on each side
Equal period on each side
Supinate foot or toe walk
Supinate foot or toe walk
Flex knee and hip on normal side
Flex knee and hip on normal side
Raise pelvis on normal side in swing
Raise pelvis on normal side in swing
phase –
phase – hip hiking
hip hiking – to clear ground
– to clear ground
52.
GL. MAXIMUS
GL. MAXIMUSWEAKNESS GAIT
WEAKNESS GAIT
GL. MAXIMUS
GL. MAXIMUS
Terminal swing- opposite side – gluteus maximus
Terminal swing- opposite side – gluteus maximus
locks hip in extension on wt bearing side
locks hip in extension on wt bearing side
Weakness-
Weakness-
pelvis thrust forward and trunk backward
pelvis thrust forward and trunk backward
shift COG backwards–
shift COG backwards–
no force GM need to lock
no force GM need to lock
increased lordosis
increased lordosis
lurch back &forth over the hips
lurch back &forth over the hips
Gowers’ sign
Gowers’ sign
53.
Gait after arthrodesis
Gaitafter arthrodesis
Pt will not tilt to side
Pt will not tilt to side
Body moves forwards & backwards
Body moves forwards & backwards
Excessive anterior pelvic tilt & lumbar lordosis
Excessive anterior pelvic tilt & lumbar lordosis
were necessary to extend the femur on the involved
were necessary to extend the femur on the involved
side while the normal limb was being advanced
side while the normal limb was being advanced
Transverse pelvic rotation about the
Transverse pelvic rotation about the
contralateral hip increased
contralateral hip increased
walking speed 84 per cent of normal
walking speed 84 per cent of normal
54.
Gait in bilateralhip diseases
Gait in bilateral hip diseases
Waddling gait
Waddling gait
Bilateral trendelenberg
Bilateral trendelenberg
CDH
CDH
COXA VARA
COXA VARA
55.
Gait in bilateralankylosis
Gait in bilateral ankylosis
Ankylosis in abduction
Ankylosis in abduction
Weight on one side
Weight on one side
Lift other side
Lift other side
Foot as fulcrum
Foot as fulcrum
Rotate the whole body
Rotate the whole body
Advance opp leg
Advance opp leg
Repeat on other side
Repeat on other side
‘
‘a curious clockwork gait’–
a curious clockwork gait’– Herbert Sedden
Herbert Sedden
56.
Ankylosis in adduction
Ankylosisin adduction
Knee close
cannot lift leg
walking not possible
Gait in bilateral ankylosis
Gait in bilateral ankylosis