This document is a thesis submitted by Debiprasad Ghosh for a Doctor of Philosophy degree in aerospace engineering at the Indian Institute of Science. The thesis examines using magnetostrictive sensors and actuators for structural health monitoring of composite structures. Composite materials are prone to damage, but damage can be difficult to detect. Traditional non-destructive testing methods have limitations. The thesis aims to develop a cost-effective, in-service system for monitoring composite structures using magnetostrictive materials. It will investigate extracting damage signatures from structural response histories using techniques like neural networks and dimension reduction.









![List of Publications
Journal papers
1. Ghosh D. P. and Gopalakrishnan S.; Role of Coupling in constitutive relationships
of magnetostrictive material. ”Computers, Materials & Continua, Vol.-1, No. 3, pp.
213-228”
2. Ghosh D. P. and Gopalakrishnan S.; Coupled analysis of composite laminate with
embedded magnetostrictive patches. Smart Materials and Structures 14 (2005)
1462-1473.
3. Ghosh D. P. and Gopalakrishnan S.; Super convergent finite element analysis of
composite beam with embedded magnetostrictive patches. Composite Structures
[in press].
4. Ghosh D. P. and Gopalakrishnan S.; Spectral finite element analysis of composite
beam with embedded magnetostrictive patches considering arbitrary order of shear
deformation and arbitrary order of poisson contraction. will be communicated
Conference papers
1. Ghosh D. P. and Gopalakrishnan S.; ”Structural health monitoring in a composite
beam using magnetostrictive material through a new FE formulation.” In Proceed-
ings of SPIE vol. 5062 Smart Materials, Structures and Systems, edited by San-
geneni Mohan, B. Dattaguru, S. Gopalakrishnan, (SPIE, Bellingham, WA, 2003)
and page number 704-711. ; Dec’12-14, 2002, Indian Institute of Science, Banga-
lore, India.
2. Ghosh D. P. and Gopalakrishnan S.; Time Domain Structural Health Monitoring
for Composite Laminate Using Magnetostrictive Material with ANN Modeling for
ix](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-12-320.jpg)









![List of Tables
1.1 Comparison of different smart materials for SHM application. . . . . . . . 10
2.1 Constants α0 through α4 for different prestress levels [192]. . . . . . . . . . 54
2.2 Connection between input layer and hidden layer. . . . . . . . . . . . . . . 63
2.3 Connection between hidden layer and output layer. . . . . . . . . . . . . . 63
2.4 Coefficients for sixth order polynomial. . . . . . . . . . . . . . . . . . . . . 78
2.5 Connection between input layer and hidden layer. . . . . . . . . . . . . . . 83
2.6 Connection between hidden layer and output layer. . . . . . . . . . . . . . 85
3.1 Vertical Displacement of Cantilever Tip . . . . . . . . . . . . . . . . . . . . 105
4.1 Tip Deflection (mm) for Static Tip Load of 1 kN . . . . . . . . . . . . . . 140
4.2 Tip Deflection (mm) for Static Tip Load of 1 kN . . . . . . . . . . . . . . 140
4.3 Tip Deflection (mm) for Actuation Current . . . . . . . . . . . . . . . . . . 141
4.4 First Three Natural Frequencies (Hz) . . . . . . . . . . . . . . . . . . . . . 142
4.5 First Three Natural Frequencies (Hz) . . . . . . . . . . . . . . . . . . . . 142
4.6 First peak amplitude of training samples (mili-volt) . . . . . . . . . . . . . 154
4.7 Middle peak amplitude of training samples (mili-volt) . . . . . . . . . . . . 154
4.8 Middle peak location of training samples (micro-second) . . . . . . . . . . 154
4.9 Last peak amplitude of training samples (mili-volt) . . . . . . . . . . . . . 155
4.10 Last peak location of training samples (micro-second) . . . . . . . . . . . . 155
4.11 First peak amplitude of validation samples (mili-volt) . . . . . . . . . . . . 157
4.12 Middle peak amplitude of validation samples (mili-volt) . . . . . . . . . . . 157
4.13 Middle peak location of validation samples (micro-second) . . . . . . . . . 157
4.14 Last peak amplitude of validation samples (mili-volt) . . . . . . . . . . . . 160
4.15 Last peak location of validation samples (micro-second) . . . . . . . . . . . 160
xix](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-22-320.jpg)

![List of Figures
1.1 Magnetostriction due to switching of magnetic domains. . . . . . . . . . . 27
1.2 Artificial Neural Network of 7-14-7 Architecture. . . . . . . . . . . . . . . . 38
2.1 Magnetostriction vs. magnetic field supplied by Etrema . . . . . . . . . . . 49
2.2 Magneto-mechanical coupling vs. magnetic field supplied by Etrema . . . . 50
2.3 Stress vs. strain relationship for different magnetic field level [Etrema] . . . 51
2.4 Elasticity vs. strain relationship for different magnetic field level [Etrema] . 51
2.5 Tangential coupling with bias field for different stress level. . . . . . . . . . 53
2.6 Coupling coefficient with bias field for different stress level. . . . . . . . . . 53
2.7 Study on the effect of number of node in hidden layer. . . . . . . . . . . . 56
2.8 Study on the effect of number of node in hidden layer. . . . . . . . . . . . 56
2.9 Test data from network and sample data set. . . . . . . . . . . . . . . . . . 57
2.10 Test data from network and sample data set. . . . . . . . . . . . . . . . . . 57
2.11 Effect of learning rate on training performance . . . . . . . . . . . . . . . . 60
2.12 Effect of learning rate on validation performance . . . . . . . . . . . . . . . 60
2.13 Effect of learning rate on batch mode training performance. . . . . . . . . 61
2.14 Effect of learning rate on validation performance for batch mode learning. . 61
2.15 Effect of momentum on training performance. . . . . . . . . . . . . . . . . 62
2.16 Effect of momentum on training performance. . . . . . . . . . . . . . . . . 62
2.17 Magnetostriction for different stress level. . . . . . . . . . . . . . . . . . . . 64
2.18 Coupling coefficient for different stress level. . . . . . . . . . . . . . . . . . 64
2.19 Magnetostriction for different stress level. . . . . . . . . . . . . . . . . . . . 66
2.20 Ratio of two permeabilities (r) with different values of permeability vs.
modulus of elasticity (a) and modified elasticity (b), considering d=15X10−9
m/Amp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
xxi](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-24-320.jpg)
![xxii List of Figures
2.21 Ratio of two permeabilities (r) with different values of coupling coefficient
vs. constant strain permeability (a) and constant stress permeability (b),
considering Q=15GPa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.22 Ratio of two permeabilities (r) with different values of coupling coefficient
vs. modulus of elasticity (a) and modified elasticity (b), considering µ =
7X10−6 henry/m. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.23 Nonlinear curves (a) Strain vs. Stress curve (b) Magnetic field vs. Magnetic
flux density curve. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2.24 Nonlinear curves in different stress level (a) Magnetic field vs. Strain (b)
Magnetic field vs. Magnetostriction. . . . . . . . . . . . . . . . . . . . . . . 80
2.25 Nonlinear curves for different field level (a) Stress vs. Strain (b) Modulus
vs. Strain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.26 Artificial neural network architecture . . . . . . . . . . . . . . . . . . . . . 83
2.27 Nonlinear curves for different stress level (a) Strain vs. Magnetic field (b)
Magnetic flux density vs. Magnetic field. . . . . . . . . . . . . . . . . . . . 84
3.1 Various elements with node and degrees of freedom. . . . . . . . . . . . . . 95
3.2 Composite Rod With Magnetostrictive Sensor and Actuator . . . . . . . . 99
3.3 Open Circuit Voltages at Magnetostrictive Sensor . . . . . . . . . . . . . . 99
3.4 Laminated Beam With Magnetostrictive Patches. . . . . . . . . . . . . . . 104
3.5 Frequency Response Function . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.6 Actuation History with Frequency content . . . . . . . . . . . . . . . . . . 109
3.7 Cantilever Tip Velocity for 00 ply angle . . . . . . . . . . . . . . . . . . . . 110
3.8 Cantilever Tip Velocity for 900 ply angle. . . . . . . . . . . . . . . . . . . . 112
3.9 Sensor Open Circuit Voltage for 00 ply angle . . . . . . . . . . . . . . . . . 113
3.10 Sensor Open Circuit Voltage for 900 ply angle . . . . . . . . . . . . . . . . 114
3.11 Multiple delaminated plate with magnetostrictive sensor and actuator . . . 117
3.12 Sensor open circuit voltage for plate with multiple delaminations . . . . . . 117
3.13 Laminated composite beam with sensor, actuator and crack . . . . . . . . 119
3.14 Sensor open circuit voltages for matrix crack in laminated composite beam 119
3.15 Sensor Open Circuit Voltages for Fiber Breakage . . . . . . . . . . . . . . . 120
3.16 Sensor Open Circuit Voltages for Internal Crack . . . . . . . . . . . . . . . 120
4.1 10 layer composite cantilever beam with different layup sequence . . . . . . 137
4.2 Natural Frequency for Cantilever Beam with [010 ] Layup sequence . . . . . 143](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-25-320.jpg)
![List of Figures xxiii
4.3 Natural Frequency for Cantilever Beam with [05 /905 ] Layup sequence . . . 143
4.4 Natural Frequency for Beam with Coupled, [m/08 /m] Layup sequence . . . 144
4.5 Natural Frequency for Beam with Uncoupled, [m/08 /m] Layup sequence . 144
4.6 Natural Frequency for Beam with Coupled, [m/04 /904 /m] Layup sequence 145
4.7 Natural Frequency for Beam with Uncoupled, [m/04 /904 /m] Layup sequence145
4.8 50 kHz Broadband Force History with Frequency Content (inset) . . . . . . 147
4.9 Effect of Beam Assumption on Tip Response [010 ] . . . . . . . . . . . . . . 147
4.10 Superconvergent Study of ScFSDT elements . . . . . . . . . . . . . . . . . 148
4.11 Open circuit voltage for Coupled, [m/08 /s] Layup sequence . . . . . . . . . 149
4.12 Sensor voltage for coupled, [m/04 /904 /s] with varying elasticity . . . . . . 151
4.13 Sensor voltage for Coupled, [m/04 /904 /s] with varying coupling coefficient 151
4.14 Open circuit voltage for Coupled, [m/04 /904 /s] layup sequence . . . . . . . 152
4.15 Training Histories of different ANN architectures . . . . . . . . . . . . . . 156
4.16 ANN with Different architectures . . . . . . . . . . . . . . . . . . . . . . . 158
4.17 Training Performance of 5-4-2 ANN architectures . . . . . . . . . . . . . . 159
4.18 Validation Performance of 5-4-2 ANN architectures . . . . . . . . . . . . . 159
5.1 Error in Natural Frequency for Different Beam Assumptions . . . . . . . . 183
5.2 Cut-Off Frequencies for [010 ] Layup with different beam assumptions. . . . 185
5.3 Cut-Off Frequencies for [m/04 /904 /m] layup with different beam assump-
tions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
5.4 Spectrum Relationships and Group Speeds for [010 ]. . . . . . . . . . . . . . 189
5.5 Spectrum Relationships and Group Speeds for [010 ]. . . . . . . . . . . . . . 190
5.6 Spectrum Relationships and Group Speeds for [m/04 /904 /m]. . . . . . . . 192
5.7 Group Speed for [m/04 /904 /m] Layup sequence. . . . . . . . . . . . . . . . 194
5.8 Group Speed for [m/04 /904 /m] Layup sequence. . . . . . . . . . . . . . . . 195
5.9 Modulated pulse of 200 kHz frequency . . . . . . . . . . . . . . . . . . . . 197
5.10 Group Speed and Modulated Pulse Response for [m/04 /904 /m] Layup with
U n = 1, W n = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
5.11 Group Speed and Modulated Pulse Response for [m/04 /904 /m] Layup with
U n = 2, W n = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
5.12 Group Speed and Modulated Pulse Response for [m/04 /904 /m] Layup with
U n = 4, W n = 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
5.13 Broadband response of 010 layup sequence. . . . . . . . . . . . . . . . . . . 204
5.14 Broadband response of [m/04 /904 /s] layup sequence (s for sensor layer). . 205](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-26-320.jpg)
![xxiv List of Figures
5.15 25 kHz Broadband Force Reconstruction for [m/04 /904 /m] layup. . . . . . 211
6.1 Modelling of Delamination in Finite Element Formulation. . . . . . . . . . 215
6.2 Comparison between Beam and 2D Modelling of Delamination . . . . . . . 217
6.3 Composite Beam with Sensor and Actuator . . . . . . . . . . . . . . . . . 218
6.4 100mm Delamination at Mid Layer and Different Distance from Support. . 220
6.5 20mm Delamination at Mid Layer and Different Distance from Support. . . 221
6.6 Delamination at Mid span of Mid Layer with Different sizes. . . . . . . . . 223
6.7 Delamination at Mid span of Top Layer with Different sizes. . . . . . . . . 224
6.8 Symmetric Delaminations at Top and Bottom Layers. . . . . . . . . . . . . 225
6.9 Symmetric Delaminations at ± 0.3mm Layers. . . . . . . . . . . . . . . . . 226
6.10 Multiple Delaminations Increasing towards the Depth. . . . . . . . . . . . 228
6.11 20, 50 and 100mm Delamination at mid and top Layer near Support. . . . 229
6.12 100mm Top Layer Delamination for Different Distance from Support. . . . 231
6.13 100mm Mid Layer Delamination for Different Distance from Support. . . . 232
6.14 100mm Bottom Layer Delamination for Different Distance from Support. . 233
6.15 20mm Top Layer Delamination for Different Distance from Support. . . . . 235
6.16 Multiple Delaminations Increasing towards the Depth . . . . . . . . . . . . 236
6.17 100mm Delamination at Top layer for 50 Hz and 5kHz Actuation. . . . . . 237
6.18 100mm Delamination at Mid layer for 50 Hz and 5kHz Actuation. . . . . . 237
6.19 100mm Delamination at Bottom layer for 50 Hz and 5kHz Actuation. . . . 237
6.20 Delamination at Top layer near support for 50 Hz and 5kHz Actuation. . . 239
6.21 Delamination at Mid layer near support for 50 Hz and 5kHz Actuation. . . 239
6.22 Delamination at Bottom layer near support for 50 Hz and 5kHz Actuation. 239
6.23 100mm Delamination at Top layer for 50 Hz and 5kHz Actuation. . . . . . 241
6.24 100mm Delamination at Mid layer for 50 Hz and 5kHz Actuation. . . . . . 241
6.25 100mm Delamination at Bottom layer from support to 200mm for 50 Hz
and 5kHz Actuation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
6.26 Delamination at Top layer near support for 50 Hz and 5kHz Actuation. . . 243
6.27 Delamination at Mid layer near support for 50 Hz and 5kHz Actuation. . . 243
6.28 Delamination at Bottom layer near support for 50 Hz and 5kHz Actuation. 243
6.29 Delaminated Composite Portal Frame with Sensors and Actuator . . . . . 244
6.30 Sensor Responses for Different Beam Assumptions. . . . . . . . . . . . . . 246
6.31 Sensor Responses for Different Locations of Sensors with EB Assumption. . 247
6.32 Sensor Responses for Different Locations of Sensors with FSDT Assumption.249](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-27-320.jpg)

![Chapter 1
Introduction
1.1 Motivation and Scope
Composites have revolutionized structural construction. They are extensively used in
aerospace, civil, mechanical and other industries. Present day aerospace vehicles have
composites upto 60 % or more of the total material used. More recently, materials, which
can give rise to mechanical response when subjected to non-mechanical loads such as
PZTs, magnetostrictive, SMAs, have become available. Such materials may broadly refer
to as functional materials. With the availability of functional materials and the feasibility
of embedding those into or bonding those to composite structures, smart structural con-
cepts are emerging to be attractive for potential high performance structural applications
[236]. A smart structure may be generally defined as one which has the ability to deter-
mine its current state, decides in a rational manner on a set of actions that would change
its state to a more desirable state and carries out these actions in a controlled manner in a
short period of time. With such features incorporated in a structure by embedding func-
tional materials, it is feasible to achieve technological advances such as vibration and noise
reduction, high pointing accuracy of antennae, damage detection, damage mitigation etc.
[128, 45].
Various damages like crack or delamination in composite structures are unavoidable
during service time due to the impact or continual load, chemical corrosion and aging,
change of ambient conditions, etc. These damages will cause a change in the strain/stress
state of the structure and hence its vibration characteristics. By continuously monitoring
one or more of these response quantities, it is possible to assess the condition of the
structure for its structural integrity. Such a monitoring of the structure is called structural
health monitoring. Health monitoring application has received great deal of attention all
over the world, due to its significant impact on safety and longevity of the structure.
1](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-29-320.jpg)
![2 Chapter 1. Introduction
To implement health monitoring concept, it is necessary to have a number of sensors
to measure response parameters. These response will then be post-processed to asses
the condition of structure. Such a system was built by Lin and Chang [232], when
they developed a built-in monitoring system for composite structures using a network
of actuators or sensors. The engineering community has great interest in the development
of new real-time, in-service health monitoring techniques to reduce cost and improve
safety. With the current NDE techniques, the complex mechanical systems need to be
taken out of service for an extended period of time for the inspection. The inspection
becomes even more lengthy and expensive for inaccessible locations. Also, on the same
preventive basis, structures are often withdrawn from service early, even if the structure is
still capable of performing its task. It is estimated that nearly 27 percent of an aircraft’s
life cycle cost is spent on inspections and repairs (Kessler et al. [178]). With an on-line,
self actuated system, such costs can be dramatically reduced. Furthermore, the impact
of such an in-situ SHM system is that it not only increases safety and performance, but
also enables converting schedule based into condition based maintenance, thus reducing
both down time and costs (Bray and Roderick [46]).
The overall objective of this thesis is how magnetostrictive sensor responses can be
used to identify the health condition of the composite structures. So, the central question
is how responses can be obtained for both healthy or damaged structures, which is forward
analysis; and how these obtained responses can be mapped with the damage state of the
structure, which is inverse problem. Hence, different 1D, 2D and 3D finite element is
formulated to get magnetostrictive sensor responses for healthy and damaged structures
with mapping of different artificial neural networks for identification of damages. Sensing
and actuation properties are characterized using available experimental results. Optimal
location of sensors are studied in structural health monitoring framework. In addition,
in-situ sensor properties and applied forces on structures are identified from truncated
sensor responses.
1.2 Background: Structural Health Monitoring
The safety and performance of all commercial, civil, and military structural systems dete-
riorate with time. Further more, it is very important to confirm the structural condition
immediately by nondestructive inspection or other method when the structure receives
the foreign object collision. Structural damage detection at the earliest possible stage is](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-30-320.jpg)
![1.2. Background: Structural Health Monitoring 3
very important in the aerospace industry to prevent major failures and for this reason it
has attracted a lot of interest. However, it is not practical to assume experts are always
available to explain the measured data. With the advances in sensor systems, data ac-
quisition, data communication and computational methodologies, instrumentation-based
monitoring has been a widely accepted technology to monitor and diagnose structural
health and conditions for civil, aerospace and mechanical structural systems. The process
of implementing a damage detection strategy for aerospace, civil, and mechanical engi-
neering infrastructure is referred to as Structural Health Monitoring (SHM). Followings
are some of the facts attributed to SHM:
• SHM is the whole process of the design, development and implementation of tech-
niques for the detection, localization and estimation of damages, for monitoring the
integrity of structures and machines.
• Because of current manual inspection and maintenance scheduling procedures are
time consuming, costly, insensitive to small variations in structural health, and prone
to error in severe and mild operating environments, there is an urgent economic and
technological need to deploy automated structural diagnostic instrumentation for
seamless evaluation of structural integrity and reliability.
• SHM offers the promise of a paradigm shift from schedule-driven maintenance to
condition-based maintenance of structures.
• The concept of SHM is a technology that automatically monitors structural condi-
tions from sensor information in real-time, by equipping sensor network and diag-
nosis algorithms into structures.
• The key requirements of a health monitoring system are that it should be able to
detect damaging events, characterize the nature, extent and seriousness of the dam-
age, and respond intelligently on whatever timescale is required, either to mitigate
the effects of the damage or to effect its repair.
Doebling et al. [100, 101] provide one of the most comprehensive reviews of the
technical literature concerning the detection, location, and characterization of structural
damage through techniques that examine changes in measured structural-vibration re-
sponse.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-31-320.jpg)
![4 Chapter 1. Introduction
1.2.1 Application Areas
1.2.1.1 Aerospace Application
SHM for Aerospace structures are studied by many researchers. Qing et al. [317] had
developed a hybrid piezoelectric/fiber optic diagnostic system for quick non-destructive
evaluation and long term health monitoring of aerospace vehicles and structures. The
SHM system for the Eurofighter Typhoon had been reported by Hunt and Hebden [164].
Fujimoto and Sekine [125] presented a method for identification of the locations and
shapes of crack and disbond fronts in aircraft structural panels repaired with bonded
FRP composite patches for extension of the service life of aging aircrafts. Zingoni [428]
had stated the essentiality of SHM, damage detection and long-term performance of aging
structures. Tessler and Spangler [366] formulated a variational principle for reconstruction
of three-dimensional shell deformations from experimentally measured surface strains,
which could be used for real-time SHM systems of aerospace vehicles. Epureanu and Yin
[115] had explored nonlinear dynamics of aeroelastic system and increased the sensitivity
of the vibration based SHM system. Baker et al. [26] reported the development of life
extension strategies for Australian military aircraft, using SHM of composite repairs and
joints. Balageas [27] had reported research and development in SHM at the European
Research Establishments in Aeronautics.
1.2.1.2 Wind Turbine Blade Application
Ghoshal et al. [133] had tested transmittance function, resonant comparison, operational
deflection shape, and wave propagation methods for detecting damage on wind turbine
blades.
1.2.1.3 Bridge Structures
Structural health monitoring of bridge had been studied by various researcher [66, 67, 68,
185, 223, 224, 225, 226, 227, 242, 276, 290, 298, 308, 359, 365, 411, 412]. DeWolf et al. [97]
had reported their experience in non-destructive field monitoring to evaluate the health
of a variety of existing bridges and shown the need and benefits in using non-destructive
evaluation to determine the state of structural health. Moyo and Brownjohn [277] had
analyzed in-service civil infrastructure based on strain data recorded by a SHM system
installed in the bridge at construction stage. Bridge instrumentation and monitoring
for structural diagnostics is been done by Farhey [118]. The strain-time histories at](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-32-320.jpg)
![1.2. Background: Structural Health Monitoring 5
critical locations of long-span bridges during a typhoon passing the bridge area were
investigated by Li et al. [223, 224, 225] using on-line strain data acquired from the SHM
system permanently installed on the bridge. Ko and Ni [185] had explored the technology
developments in the field of long term SHM and their application to large-scale bridge
projects, in order to secure structural and operational safety and issue early warnings
on damage or deterioration prior to costly repair or even catastrophic collapse. Patjawit
and Nukulchai [308] conducted laboratory tests to demonstrate the sensitivity of Global
Flexibility Index for SHM of highway bridges. Li et al. [226] had studied the reliability
assessment of the fatigue life of a bridge-deck section based on the statistical analysis of
the strain-time histories measured by the SHM system permanently installed on the long-
span steel bridge. Li et al. [223, 224, 225] had determined the effective stress range and
its application on fatigue stress assessment of existing bridges. Tennyson et al. [365] had
described the design and development and application of fiber optic sensors for monitoring
of bridge structures.
1.2.1.4 Under Ground Structure
A low-cost fracture monitoring system for underground sewer pipelines had been reported
by Todoroki et al. [367] using sensors made of fabric glass and carbon black-epoxy com-
posite materials. Bhalla et al. [42] had addressed technology associated with SHM of
underground structures. An experimental program was carried out by Mooney et al.
[274] to explore the efficacy of vibration based SHM of earth structures, e.g., foundations,
dams, embankments, and tunnels, to improve design, construction, and performance.
1.2.1.5 Concrete Structure
SHM of concrete structure is performed by many researchers [41, 292, 359]. Corrosion of
the reinforcing bars in concrete beams was monitored by Maalej et al. [241] using fiber op-
tic sensor. Both semi-empirical and experimental results for one-way reinforced concrete
slab were studied by Koh et al. [187] using Fast Fourier Transform and the Hilbert Huang
Transform. Chen et al. [75] used coaxial cables as distributed sensors to detect cracks in
reinforced concrete structures from the change in topology of the outer conductor under
strain conditions. Bhalla and Soh [41] discuss the feasibility of employing mechatronic
conductance signatures of surface bonded piezoelectric-ceramic (PZT) patches in moni-
toring the conditions of reinforced concrete structures subjected to base vibrations, such
as those caused by earthquakes and underground blasts. Nojavan and Yuan [292] have](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-33-320.jpg)
![6 Chapter 1. Introduction
proposed SHM systems using electromagnetic migration technique to image the damages
in reinforced concrete structures. Taha and Lucero [359] examined fuzzy pattern recog-
nition techniques to provide damage identification using the data simulated from finite
element analysis of a prestressed concrete bridge without a priori known levels of damage.
1.2.1.6 Composite Structure
Fibre reinforced laminate composites are widely used nowadays in load-bearing structures
due to their light weight, high specific strength and stiffness, good corrosion resistance and
superb fatigue strength limit. While composite materials enjoy different advantages, they
are also prone to a wide range of defects and damage which may significantly reduce their
structural integrity. Internal damages such as delamination, fiber breakage and matrix
cracks are caused easily in the composite laminates under external force such as foreign
object collision. Such damages induced by transverse impact can cause reductions in the
strength and stiffness of the materials, even if the damages are tiny. Hence, there is a
need to detect and locate damage as it occurs.
Wang et al. [387] investigated the interaction between a crack of a cantilevered
composite panel and aerodynamic characteristics by employing Galerkins method for one-
dimensional beam vibrating in coupled bending and torsion modes. Prasad et al. [312]
used Lamb wave tomography for SHM of composite structures. Iwasaki et al. [167] had
implemented unsupervised statistical damage detection method for SHM delaminated
composite beam. Dong and Wang [103] had presented the influences of large deformation
for geometric non-linearity, rotary inertia and thermal load on wave propagation in a
cylindrically laminated piezoelectric shell. Verijenko and Verijenko [380] had studied
smart composite panels with embedded peak strain sensors for SHM. Takeda [362] had
presented a methodology for observation and modelling of microscopic damage evolution
in quasi-isotropic composite laminates. Kuang et al. [195] used polymer-based sensors for
monitoring the static and dynamic response of a cantilever composite beam. Chung [88]
had reviewed the use of smart materials in composite. Takeda [360] reported the summary
of the structural health-monitoring project for smart composite structure systems as a
university-industry collaboration program.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-34-320.jpg)
![1.2. Background: Structural Health Monitoring 7
1.2.2 Sensors and Actuators
1.2.2.1 Piezoelectric Material
Piezoelectric are class of sensor/actuator materials, which are available in various forms.
It is available in the form of crystals, polymers or ceramics. Polymer form is normally
called PVDF (PolyVinylidine DiFluoride) and is available as very thin films, which are
extensively used as sensor material. In ceramic form, it is called PZT (Lead Zirconate
Titanate), which is used both as sensor and actuator.
PZT has been used by many researchers [41, 72, 130, 103, 131, 317, 329, 350, 385]
for SHM. Koh et al. [186] reported an experimental study for in situ detection of disbond
growth in a bonded composite repair patch in which an array of surface-mounted lead
zirconate titanate elements (PZT) had been used. Bonding piezoelectric wafers to either
end of the fasteners, Barke et al. [30] had shown a technique capable of detecting in situ
damage in structural grades of fasteners. Han et al. [145] had presented a vibration-
based method of detection of the crack in the structures by using piezoelectric sensors
and actuators glued to the surface of the structure. Wang and Huang [391] reported a
theoretical study of elastic wave propagation in a cracked elastic medium induced by an
embedded piezoelectric actuator. Wang and Huang [390] provided a theoretical study of
crack identification by piezoelectric actuator. Gex et al. [131] presented low frequency
bending piezoelectric actuator for fatigue tests and damage detection. Qualitative exper-
imental results of fatigue tests and damage detection were presented and low frequency
bending piezoelectric actuator was used by Gex et al. [130] for SHM. Ritdumrongkul et al.
[329] used PZT actuator-sensor in conjunction with numerical model-based methodology
in SHM to quantitatively detect damage of bolted joints.
1.2.2.2 Optical Fiber
Fiber-optic sensors are gaining rapid attention in the field of SHM [68, 94, 154, 173, 210,
219, 234, 278, 357]. Tsuda et al. [374] studied damage detection of CFRP using fiber
Bragg gratings sensors. Murayama et al. [280] studied SHM of a full-scale composite
structure using fiber optic sensors. High-speed dense channel fiber optic sensors based
on Fiber Bragg Grating (FBG) technology was used by Cheng [74] for SHM. Xu et al.
[410] introduced an approach for delamination detection using fiber-optic interferometric
technique. Long gage and acoustic sensors types of optical fibers were used for SHM
of large civil structural systems by Ansari [20]. Suresh et al. [357] had presented fiber](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-35-320.jpg)
![8 Chapter 1. Introduction
Bragg grating based shear force sensor in SHM. Tennyson et al. [365] had described
the development and application of fiber optic sensors for monitoring bridge structures.
Chan et al. [68] investigated the feasibility of SHM using FBG sensors, via monitoring
the strain of different parts of a suspension bridge. Fiber bragg grating strain sensors was
developed by Moyo et al. [278] for SHM of large scale civil infrastructure. Kang et al.
[173] had studied the embedding technique of fiber Bragg grating sensors into filament
wound pressure tanks used for SHM. Embedded optical fiber Bragg grating sensors was
used by Herszberg et al. [154] for SHM. Ling et al. [234] had studied the dynamic
strain measurement and delamination detection of composite structures using embedded
multiplexed FBG sensors through experimental and theoretical approaches and revealed
that the use of the embedded FBG sensors is able to actually measure the dynamic strain
and identify the existence of delamination of the structures. Li et al. [227] had presented
an overview of research and development in the field of fiber optical sensor SHM for civil
engineering applications, including buildings, piles, bridges, pipelines, tunnels, and dams.
Cusano et al. [94] described the design of a fiber Bragg grating sensing system for static
and dynamic strain measurements leading to the possibility to perform high frequency
detection for on-line SHM in civil, aeronautic, and aerospace applications. Fluorescent
fiber optic sensors were used by McAdam et al. [262] for preventing and controlling
corrosion in aging aircraft.
1.2.2.3 Vibrometer
Scanning laser vibrometer [221, 345, 356] are used for SHM mainly for their non-contact,
distributed sensing.
1.2.2.4 Magnetostrictive Material
Sensing of delamination in composite laminates using embedded magnetostrictive mate-
rial was studied by Krishna Murty, A. V. et al. [192]. Saidha et al. [335] presented an
experimental investigation of a smart laminated composite beam with embedded/surface-
bonded magnetostrictive patches for health monitoring applications. Theoretical and
experimental investigation had been done by Giurgiutiu et al. [134] for SHM of magne-
tostrictive composite beams. Hison et al. [156] reported magnetoelastic sensor prototype
for on-line elastic deformation monitoring and fracture alarm in civil engineering struc-
tures.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-36-320.jpg)
![1.2. Background: Structural Health Monitoring 9
1.2.2.5 Nano sensor
Watkins et al. [392] had studied on single wall carbon nanotube-based SHM sensing
materials. Collette et al. [91] had developed nano-scale electrically conductive strain
measurement device potential for SHM. This nano-sensor based SHM has great potential
in the coming years.
1.2.2.6 Comparisons of different sensors
In high frequency structural application like, SHM, frequency bandwidth of the material
is most important criteria for both sensing and actuation mechanism. Although shape
memory alloy gives high strain of 2-8%, its bandwidth limitation is one of the main
disadvantages for SHM application.
Actuator: The maximum force exerted by any material is necessarily limited by
its maximum stress. In order to maximize the actuation force, it is generally desirable
to employ a material with a large maximum stress capable of large actuation strains. It
seems unlikely that both parameters can be optimized in the same materials. As a result,
the maximum actuation force of future materials may not be vastly greater than the forces
achievable at present. Low-stiffness materials with large actuation strains can provide an
effective source of actuation for certain type of structural applications. Ferromagnetic
Shape-Memory Alloys can produce relatively large strains, limited mainly by the yield
strength of the metal. Given the trade-off between stiffness and strain, perhaps the more
important physical limit to consider in SHM application is the maximum actuation stress
that is achievable by a material. PZT actuators typically provide displacements of 0.13%
strains. Their large bandwidth is another great advantage; operation in the gigahertz
frequency range is even possible. They have good linearity, and since they are electrically
driven, can be directly integrated with the composite structures. The devices and material
are moderately priced compared to other actuators. Piezoceramics specific weigh near 7.5-
7.8 and have a maximum operating temperature near 300◦ C. The main disadvantage of
piezoelectric actuators is the high voltage requirements, typically from 1 to 2 kV. Further,
as the size of the actuators increases, so does the required voltage, making them favorable
only for small-scale devices. Being ceramic, PZT actuators are also brittle, requiring
special packaging and protection. Other disadvantages are the high hysteresis and creep,
both at levels from 15-20%. Electrostrictive materials can provide 0.1% strain and operate
from 20 to 100 kHz. They have specific weigh near 7.8 with operating temperatures near
300◦ C. Finally, their low hysteresis (<1%) makes them unique among most smart material](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-37-320.jpg)

![1.2. Background: Structural Health Monitoring 11
modulus but with a high coupling coefficient. For those applications that can tolerate low
mechanical stiffness, PVDF is generally chosen over a piezoceramic material because of its
low modulus and relatively low cost, despite its relatively low electromechanical coupling
coefficient. Flexibility and manufacturability of PVDF sensor has made them popular
for use as thin-film contact sensors and acoustic transducers. The main advantage of
magnetostrictive sensing is that the fundamental technology is non-contact in nature so
that the sensors can last indefinitely and can be inserted inside the composite layers.
1.2.3 Solution Domain
Literature for SHM can be divided according to their solution domain. These are the
following:
1.2.3.1 Static Domain
In the presence of damage, stiffness matrix of the structure changes. Due to this change,
displacement of the structure due to static load changes. This change is one of the criteria
used for the detection of damage. Jenkins et al. [169] introduced a static deflection based
damage detection method. They mention that the other methods are relatively insensitive
to many instances of localized damage such as fatigue crack or notch, which results in very
little changes in the system mass or inertia. Zhao and Shenton [235] presented a novel
damage detection method based on best approximation of dead load stress redistribution
due to damage.
For self-equilibrating static load (usually generated from smart actuator), the effect
of load far away from the actuator has negligible effect on the static response, even in the
presence of damage. Hence, the change of structural properties distant from the actuator
cannot be sensed through static self-equilibrating load. Hence, the use of smart actuator
for SHM in static domain is limited to the proximity of actuator only.
1.2.3.2 Modal domain
Since modal parameters depend on the material property and geometry, the change in
natural frequencies, mode shape curvature etc. can be used to locate the damage in
structures without the knowledge of excitation force, when linear analysis is adequate.
The amount of the literature pertaining to the various methods for SHM based on modal
domain is quite large [58, 66, 177, 197, 197, 221, 242, 290, 342, 378, 379]. New and](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-39-320.jpg)
![12 Chapter 1. Introduction
sophisticated strategies for damage identification using modal parameters is studied ex-
tensively (e.g. [Ratcliffe, [320]; Lam et al., [208]; Ratcliffe and Bagaria, [321]; Ratcliffe
[322]; Chinchalkar, [77]). Lakshminarayana and Jebaraj, [206] used the first four bending
and torsional modes and corresponding changes in natural frequencies to estimate the lo-
cation of a crack in a beam. It is reported that if the crack is located at the peak/trough
positions of the strain mode shapes, then percentage change in frequency would be higher
for corresponding modes. It is also found that if the crack is located at the nodal points of
the strain mode shapes, then the percentage change in frequency values would be lower for
corresponding modes. Uhl [376] presented different approaches for identification of modal
parameters for model-based SHM. Khoo et al. [182] presented modal analysis techniques
for locating damage in a wooden wall structure. Ching and Beck [78] used modal identifi-
cation for probabilistic SHM. Verboven et al. [378] applied total least-squares algorithms
for the estimation of modal parameters in the frequency-domain. Caccese et al. [58] stud-
ied the detection of bolt load loss in hybrid composite/metal bolted connections using
low frequency modal analysis. Sodano et al. [342] used macro-fiber composites sensor to
find modal parameters for SHM of an inflatable structure. Chan et al. [66] updated finite
element model of a large suspension steel bridge using modal characteristics for SHM of
the bridge. Laser vibrometer, designed for modal analysis was used for crack detection in
metallic structures by Leong et al. [221].
The presence of delamination changes the structural dynamic characteristics and
can be traced in natural frequencies, mode shapes, phase, dynamic strain and stress
wave patterns etc. Significant research has been reported on the effect of delamination
on natural frequencies and mode shapes and strategies have been developed to identify
location of delamination using changes in these modal parameters (Tracy and Pardoen,
[371]; Gadelrab, [127]; Schulz at al., [338]; Zou et al., [430]; Chinchalkar, [77]). Tracy and
Pardoen, [371] found that if the delamination is in a region of mode shape where the shear
force is very high, there will be considerable degradation in natural frequency, which is
otherwise not significant. Hence, by studying the mode shapes and the corresponding
natural frequencies, estimation on the location of delamination can be made.
Resonant Frequencies / Natural Frequencies: The resonant frequencies are defined
as the frequencies at which the magnitude of the frequency response at a measured de-
grees of freedom approaches infinity, which is also called as natural frequency. Adams,
et al. [4] illustrated a method to detect damage from changes in resonant frequencies.
Wang and Zhang [389] estimate the sensitivity of modal frequencies to changes in the](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-40-320.jpg)
![1.2. Background: Structural Health Monitoring 13
structural stiffness parameters. Zak et al. [420] examined the changes in resonant fre-
quencies produced by closing delamination in a composite plate. In particular, the effects
of delamination length and position on changes in resonant frequencies were investigated.
Williams and Messina [396] formulate a correlation coefficient that compares changes in a
structure’s resonant frequencies with predictions based on a frequency-sensitivity model
derived from a finite element model. Hearn and Testa [152] developed a damage detection
method from ratio of changes in natural frequency for various modes.
Antiresonance frequencies: The antiresonance frequencies are defined as the frequen-
cies at which the magnitude of the frequency response at measured degrees of freedom
approaches zero [310]. To calculate antiresonance frequencies of a dynamic system, He
and Li [151] developed an accurate and efficient method for undamped systems. The rea-
sons for looking to the antiresonance frequencies are that these antiresonance frequencies
can be easily and accurately measured in a similar way as for the natural frequencies.
Furthermore, a system can have much greater number of antiresonance frequencies than
natural frequencies because every different FRF between an actuator and a sensor con-
tains another set of antiresonance frequencies. Williams and Messina [396] considered
anti-resonance frequencies for their damage detection technique. Lallement and Cogan
[207] introduced the concept of using antiresonance frequencies to update FE models.
Mottershead [275] showed that the antiresonance sensitivities to structural parameters
can be expressed as a linear combination of natural frequency and mode shape sensitivi-
ties, and furthermore that the dominating contributors to the antiresonance sensitivities
are the sensitivities of the nearest frequencies and corresponding mode shapes. It is con-
cluded that the antiresonance frequencies can be a preferred alternative to mode shape
data.
Mode Shapes: Doebling and Farrar [99] examine changes in the frequencies and
mode shapes of a bridge as a function of damage. This study focuses on estimating the
statistics of the modal parameters using Monte Carlo procedures to determine if damage
has produced a statistically significant change in the mode shapes. Stanbridge, et al. [343]
also use mode shape changes to detect saw-cut and fatigue crack damage in flat plates.
They also discuss methods of extracting those mode shapes using laser-based vibrometers.
Another application of SHM using changes in mode shapes can be found in (Ahmadian
et al. [13]). West [393] used mode shape information (Modal Assurance Criteria) for the
location of structural damage. Ettouney et al. [116] discuss a comparison of three different
SHM techniques applied to a complex structure, which are based on the information of](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-41-320.jpg)
![14 Chapter 1. Introduction
mode shapes and natural frequencies of the damaged and undamaged structure.
Mode Shape Curvatures / Modal Strain Energy: Pandey, et al. [303] identified the
absolute changes in mode shape curvature as an indicator of damage. An experimental
damage detection investigation of fiber-reinforced polymer honeycomb sandwich beams
was performed by Lestari and Qiao [222] based on the curvature mode shapes. Different
damage detection algorithms were studied by Hamey et al. [143] using curvature modes of
structures with piezoelectric sensors or actuators. Ho and Ewins [157] present a Damage
Index method, which is defined as the quotient squared of a structure’s modal curvature
in the undamaged state to the structure’s corresponding modal curvature in its damaged
state. In another paper by Ho and Ewins [158], the authors state that higher derivatives
of mode shapes are more sensitive to damage, but the differentiation process enhances
the experimental variations inherent in those mode shapes. Zhang et al. [425] propose
a structural damage identification method based on element modal strain energy, which
uses measured mode shapes and modal frequencies from both damaged and undamaged
structures as well as a finite element model to locate damage. Worden et al. [403] present
another strain energy study using a damage index approach. Carrasco et al. [55] discuss
using changes in modal strain energy to locate and quantify damage within a space truss
model. Choi and Stubbs [83] used changes in local modal strain energy to develop a
method for detecting damage in two-dimensional plates.
Modal Damping: When compared to frequencies and mode shapes, damping prop-
erties have not been used as extensively as frequencies and mode shapes for damage
diagnosis. Crack detection in a structure based on damping, however, has the advantage
over other detection schemes based on frequencies and mode shapes. This is due to the
fact that the damping changes have the ability to detect the nonlinear, dissipative effects
that cracks produce. Modena et al. [272] show that the visually undetectable cracks cause
very little change in resonant frequencies and require higher mode shapes to be detected,
while the same cracks cause larger changes in the damping. Zonta et al. [429] observe that
crack creates a non-viscous dissipative mechanism for making damping more sensitive to
damage. Kawiecki [176, 177] notes that damping can be a useful damage-sensitive feature
particularly suitable for SHM of lightweight and micro-structures. Author has described
the application of arrays of surface-bonded piezo-elements to determine modal damping
characteristics for structural healthy monitoring of light-weight and micro-structures.
Dynamic Stiffness from Mode shape: Many structural health-monitoring techniques
rely on the fact that structural damage can be expressed by a reduction in stiffness. Maeck](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-42-320.jpg)
![1.2. Background: Structural Health Monitoring 15
and Roeck [243] apply a direct stiffness approach to damage detection, localization, and
quantification for a bridge structure, which uses experimental frequencies and mode shapes
in deriving the dynamic stiffness of a structure.
Dynamic Flexibility from Mode shape:A reduction in stiffness corresponds to an
increase in structural flexibility. Dynamically measured flexibility matrix [G] of the dam-
aged structure can be estimated from the natural frequencies [Λ] and normalized mode
shapes [Φ] as:
[G] ≈ [Φ][Λ]−1 [Φ]T
Pandey and Biswas [302] present a damage-detection and damage localization method
based on changes in the flexibility of the structure. Mayes [261] uses measured flexibility to
locate damage from the results of a modal test on a bridge. Aoki and Byon [21] presented
modal-based structural damage detection using localized flexibility properties that can
be deduced from the experimentally determined global flexibility matrix. Bernal [39]
mentions that changes in the flexibility matrix are sometimes more desirable to monitor
than changes in the stiffness matrix. Because the flexibility matrix is dominated by the
lower modes, good approximations can be obtained even when only a few lower modes
are employed. Reich and Park [327] focus on the use of localized flexibility properties
for structural damage detection. The authors choose flexibility over stiffness for several
reasons, including the facts that (1) flexibility matrices are directly attainable through
the modes and mode shapes determined by the system identification process, (2) iterative
algorithms usually converge the fastest to high eigenvalues, and (3) in flexibility-based
methods, these eigenvalues correspond to the dominant low-frequency components in
structural vibrations. A structural flexibility partitioning technique is used because when
the global flexibility matrix is used, there is an inability to uniquely model elemental
changes in flexibility. The strain-based sub-structural flexibility matrices measured before
and after a damage event, are compared to identify the location and relative degree of
damage. Topole [368] discusses the use of the flexibility of structural elements to identify
damage. Author indicates that there are certain instances where it is advantageous to use
changes in flexibility as an indicator of damage rather than using stiffness perturbations.
Topole develops a sensitivity matrix that describes how modal parameters are affected
by changes in the flexibility of structural elements. From this information, he develops a
scalar quantity for each structural element, which indicates the relative level of damage
within the element.
Unity Check Method: In unity check method, the product of an undamaged stiffness](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-43-320.jpg)
![16 Chapter 1. Introduction
matrix K u and dynamically measured flexibility matrix [G] from a unity matrix at any
stage of damage are checked using following relation.
[E] = [G][K u ] − I
The unity check method, proposed by Lin [230, 231] is useful for locating and quantifying
damage using modal parameters.
Best Achievable Eigen Vectors: Lim and Kashangaki, [229] located damage in space
truss structures by computing Euclidian distances between the measured mode shapes
and best achievable eigenvectors. The best achievable eigenvectors are the projection of
the measured mode shapes onto the subspace defined by the refined analytical model of
structure and measured frequencies.
Limitation of Modal Domain in SHM: However modal methods are not very sen-
sitive to the small size of delaminations which are of practical interest, and can be very
cumbersome as well as computationally expensive while implementing in practice for on-
line health monitoring. In most of the methods based on modal parameters, it is assumed
that the modes under consideration are affected by damages. As pointed out by Ratcliffe,
[322], the change in individual natural frequencies due to small damage may become
insignificant and may fall within measurement error. In practical situation, this can con-
siderably reduce the effectiveness of the prediction. The main limitation of modal domain
approach is that the lower modes are less sensitive to damage, particularly becomes a
significant problem when only a few lower modes are used in SHM. Change of structural
dynamic performance caused by structural damage that is less than 1% of the total struc-
tural size is unnoticeable. Yan and Yam [415] pointed out that when the crack length in
a composite plate equals 1% of the plate length, the relative variation of structural nat-
ural frequency is only about 0.01 to 0.1%. Therefore, using vibration modal parameters,
e.g., natural frequencies, displacement or strain mode shapes, and modal damping are
generally ineffective in identifying small and incipient structural damage.
1.2.3.3 Frequency Domain
In frequency domain method, most important part is to calculate the dynamic stiffness
matrix at each frequency either from stiffness and mass matrix or directly from spectral
formulation. The applied load vector is transformed in the frequency domain by Fourier
Transform, and solved for structural response at each frequency. After getting responses
for each frequency, inverse Fourier Transform gives the time domain responses.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-44-320.jpg)
![1.2. Background: Structural Health Monitoring 17
Frequency Response Function (FRF): Although the majority of investigations into
structures under dynamic loading are concerned with obtaining the natural frequencies,
and possibly mode shapes, of the structure, a much more valuable description of the
dynamic behavior of the structure is the FRF, which describes the relationship between a
local excitation force applied at one location on the structure and the resulting response
at another location. Essentially, the FRF returns information about the behavior of the
structure over a range of frequencies. The response at a particular frequency for some
forcing and response locations will simply be a single complex number, which is often
plotted in terms of real and imaginary parts or in terms of amplitude and phase. The
frequency response of a system can be measured by: (1) applying an impulse to the
system and measuring its response. (2) sweeping a constant-amplitude pure tone through
the bandwidth of interest and measuring the output level and phase shift relative to the
input.
Mal et al. [252] presented a methodology for automatic damage identification and
localization using FRF of the structure. Agneni, et al. [12] use the measured FRFs for
damage detection. Lopes, et al. [237] relate the electrical impedance of the piezoelec-
tric material to the FRFs of a structure. The FRFs are extracted from the measured
electric impedance through the electromechanical interaction of the piezoceramic and the
structure. Trendafilova [372] use the FRFs as damage-sensitive features.
Spectral finite element (SFE): SFE gives exact dynamic stiffness matrix for two
noded elements for frequency domain solution. Sreekanth et al. [198] had modeled trans-
verse crack in SFE formulation to simulate the diagnostic wave scattering in composite
beams for SHM technique. Mahapatra and Gopalakrishnan [247] had studied the effect
of wave scattering and power flow through multiple delaminations and strip inclusions in
composite beams with distributed friction at the inter-laminar region using SFE formu-
lation. Nag et al. [285] had proposed a SFE method for modeling of wave scattering in
laminated composite beam with delamination.
1.2.3.4 Time-Frequency Domain
In contrast to the Fourier analysis, the time-frequency analysis can be used to analyze
any nonstationary events localized in time domain. Vill [381] notes that there are two
basic approaches to time-frequency analysis. The first is to divide the signal into slices
in time and to analyze the frequency content of each of these slices separately. The
second approach is to first filter the signal at different frequency bands and then cut](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-45-320.jpg)
![18 Chapter 1. Introduction
the frequency bands into slices in time to analyze their energy content as a function
of time and frequency. The first approach is the basic short term Fourier transform,
also known as spectrogram, and the second one is the Wigner-Wille Transform. Other
time-frequency analysis techniques include, but are not limited to, wavelet analysis and
empirical mode decomposition combined with Hilbert transform. Bonato et al. [44]
extract modal parameters from structures in non-stationary conditions or subjected to
unknown excitations using time-frequency and cross-time-frequency techniques. Mitra
and Gopalakrishnan [269, 270, 271] have developed wavelet transform based spectral finite
element formulation, which they used to identify the delamination of composite laminates.
1.2.3.5 Impedance Domain
The basic concept of impedance method is to use high-frequency structural excitations
to monitor the local area of a structure for changes in structural impedance that would
indicate imminent damage. The impedance domain technique successfully detects damage
that is located near the sensor/actuator.
Electro-mechanical impedance (EMI): Electro-mechanical impedance is a technique
for SHM that uses a collocated piezoelectric actuator/sensor to measure the variations of
mechanical impedance of a structural component or assembly. This technique relies on the
electromechanical coupling between the electrical impedance of the piezoelectric materials
and the local mechanical impedance of the structure adjacent to the PZT materials.
The PZT materials are used both to actuate the structure and to monitor the response.
From the input and output relationship of the PZT materials, the electrical impedance
is computed. When the PZT sensor actuator is bonded to a structure, the electrical
impedance is coupled with the local mechanical impedance. Small flaws in the early
stages of damage are often undetectable through global vibration signature methods,
but these flaws can be detected using the PZT sensor-actuator, provided that the PZT
sensor actuators are near the incipient damage. By inspecting the differences between the
impedance spectrum of a reference baseline of the structure in an undamaged condition
and the impedance spectrum of the same structure with damage, incipient anomalies of
the structural integrity can be detected. This health monitoring technique can also be
implemented in an on-line fashion to provide a real-time assessment to detect the presence
of structural damage.
Giurgiutiu and Zagrai [137] used high-frequency electro-mechanical impedance spec-
tra for health monitoring of thin plates. Park et al. [305] summarized the hardware](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-46-320.jpg)
![1.2. Background: Structural Health Monitoring 19
and software issues of impedance-based SHM, where high-frequency structural excitations
are used to monitor the local area of a structure from changes in structural impedance.
Piezoelectric-wafer active sensors SHM and damage detection based on elastic wave prop-
agation and the Electro-Mechanical (E/M) impedance technique is reviewed by Giurgiu-
tiu et al. [138]. Giurgiutiu et al. [136] apply this method for health monitoring of
aging aerospace structures. Giurgiutiu and Rogers [135] discussed the use of an Electro-
Mechanical Impedance (EMI) technique to detect incipient damage within a structure.
Limitation of Impedance Domain: Although, Impedance technique is suitable for the
detection of very small damage, it cannot identify damage from the far field measurement.
This is due to very high frequency solution domain, which is suitable for local identification
of damage.
1.2.3.6 Time Domain
In time domain SHM, damage is estimated using time histories of the input and vibration
responses of the structure. The structure is excited by multiple actuators across a desired
frequency range. Then, the structure’s dynamics are characterized by measuring the
response between each actuator/sensor pair. Using these time response over a long period
while at the same time taking into account the information on several modes so that the
damage evaluation is not dependent on any one particular mode, the presence of damage
is assessed. The big advantage of this method is that it can detect damage situations
both globally and locally by monitoring the input frequencies. In industry, using the
time domain measured structural vibration responses to identify and monitor structural
damage is one of the important ways to ensure reliable operation and reduced maintenance
cost for in-service structures. One of the main advantages of this solution domain is, it
can handle nonlinearity and hysteresis easily.
1.2.4 Levels of SHM
The major tasks in structural health monitoring and damage identification can be cate-
gorized under different levels as given below:
1.2.4.1 Unsupervised SHM
Unsupervised SHM is defined as the one, where the structural model of damage state is
not available for computation.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-47-320.jpg)
![20 Chapter 1. Introduction
NDE: Different nondestructive testing (Visual Inspection, Thermograph, Electrical
resistance, Magnetic particle, Eddy current, Die penetration, Acoustic Emission etc.) are
used for structural health monitoring.
Novelty detection: In this level of SHM, sensor responses of both damaged and
undamaged structure are required (for same actuation) to compare healthy and damaged
structural response for identification of the existence of damage.
Material Property identification: Different material property identification (damp-
ing, elasticity, density, magneto-mechanical coupling etc.) is performed from sensor re-
sponse and actuation.
Force Identification: Actuation or Impact force identification (bird strike, space de-
bris or foam impact in space craft, aerodynamic forces etc.) requires both sensor response,
and undamaged structural model.
Damage localization: Basic idea behind damage localization is some unbalanced
forces exist near the damage. That is, if damage occurs, the damage vector will have
nonzero entities only at the DOFs connected to the damaged elements. Fukunaga et al.
[126] showed a damage identification method based on dynamic residual forces which can
be evaluated using an analytical model of undamaged structures and measured vibration
data of damaged structures. Schulz et al., [338] used damage force to identify the elements
having damage. Nag et al. [284] have used damage force indicator for identification of
delaminations in laminated composite beams with spectral finite element model based on
the Fast Fourier Transform.
1.2.4.2 Supervised SHM
Supervised SHM is defined as where structural model of damaged state is also available
for computation.
Damage confirmation: This is referred as forward problem in structural health
monitoring. Damage location and extent are assumed and modelled in finite element to get
the response of damaged structure. If this response dose not matches with experimentally
measured response, damage properties are changed. So, this is an iterative process. As
the finite element computation is costly, good prediction of damage is always required,
which can be obtained from inverse mapping between damage to its responses.
Damage estimation: This is refereed to as inverse problem in structural health
monitoring. It identifies the magnitude, location and type of the damage from response
of damaged structure directly using artificial neural network, which are trained by some](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-48-320.jpg)

![22 Chapter 1. Introduction
It also triggers the development of delaminations, which can cause fiber-breakage in the
primary load-bearing plies. A number of theories have appeared in an attempt to predict
the initiation of transverse cracking and describe its effect on the stiffness properties of the
laminate. Following are the methods on which these theories are based: the self-consistent
method, variational principles, continuum damage mechanics, shear lag, approximate
elasticity theory solutions and stress transfer mechanics.
Modelling of cracked beams can be performed by 2-D or 3-D FEM. Alternatively;
simplified procedures are available with less computational effort. Among these simplified
methods are those proposed by Christides and Barr [86] and Shen and Pierre [339, 340].
In both cases, a crack function representing the perturbation in the stress field induced
by the crack is considered. Chondros et al. [84] have developed a continuous cracked
beam vibration theory. They considered that the crack introduces a continuous change
in the flexibility in its neighborhood and models it by incorporating a displacement field
consistent with the singularity. In other cases, the cracked beam is modelled as two
segments connected by means of massless rotational springs [4], whose stiffness may be
related to the crack length by the fracture mechanics theory [172]. Thus, at the cracked
section, a discontinuity in the rotation due to bending must be considered. These kinds
of models have been successfully applied to Euler-Bernoulli cracked beams with different
support conditions [287, 218, 28, 43, 121, 120].
Dvorak et al. [113] evaluated overall stiffnesses and compliances, for a composite
lamina which contains a given density of matrix cracks and subjected to uniform me-
chanical loads. The evaluation procedure is based on the self-consistent method and is
similar, to that used in finding elastic constants of unidirectional composites. Hashin [147]
analyzed cross-ply laminates by variational methods for tensile and for shear membrane
loading, which contain distributions of intralaminar cracks within the 90 degree ply. In an-
other paper, Hashin [148] treated the problem of stiffness reduction and stress analysis of
orthogonally cracked cross-ply laminates under uniaxial tension by the variational method
based on the principle of minimum complementary energy. Talreja [363] predicted the
stiffness reductions due to transverse cracking in composite laminates from crack initiation
to crack saturation using the stiffness-damage relationships of continuum damage model.
Later, Talreja et al. [364] tested cross ply laminate under longitudinal tensile loading for
the behavior of transverse cracking and the associated mechanical response. Shear-lag-
based models [423, 424, 155, 297, 146, 217, 409, 40, 422] remain the most commonly used
ones for calculating the reduced stiffness properties of transversally cracked composites.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-50-320.jpg)
![1.2. Background: Structural Health Monitoring 23
They are being modified and generalized to enable better description of wider classes of
laminates. Nuismer and Tan [293] gave an approximate elasticity theory solution for the
stress-strain relations of a cracked composite lamina. McCartney [263, 264] estimated the
dependence of the longitudinal values of Young’s modulus, Poisson’s ratio, and thermal
expansion coefficient on the density of transverse cracks. Recently, Kumar et al. [198, 199]
modelled cracked composite laminate using spectral finite element formulation for wave
based structural diagnostics.
1.2.5.2 Techniques for Modelling of Delamination
Delaminations in composites are usually modelled using beams, plates or shells with ap-
propriate kinematics. The technique used by Majumdar and Suryanarayana [251] to
model a through-width delamination subdivides the beam into a delamination region
(sub-laminates) and two integral regions (base-laminates) on either side of the delamina-
tion region. Each of these sub-laminates and base-laminates are modelled as Euler beam
and the whole structure is solved satisfying global boundary conditions. For one dimen-
sional beam elements, additional axial forces give rise to a net resultant internal bending
moment which creates differential stretching of the sub-laminates above and below the
plane of delamination. The model used by Tracy and Pardoen [371] to study the effect
of delamination on natural frequency is also based on the engineering beam theory. This
model uses 2-D beam elements and includes the effect of contact between the delaminated
surfaces and can allow independent extensional and bending stiffness.
Gadelrab [127] in his work has taken two different types of finite elements for the
undelaminated and delaminated elements. For undelaminated elements, all the lamina
assumed to have the same transverse and longitudinal displacements at a typical cross-
section, but each lamina can rotate by different amount from the others depending on
its material and geometrical properties. This is also called “layer-wise constant shear
kinematics”. The delaminated element has the same transverse and axial displacement
at both ends of the element. Only the rotation is different along the element length
of each lamina. In the same direction, Barbero and Reddy [29] used layer-wise plate
theory for modelling delamination in plates where delaminations were simulated by step
discontinuity at the interfaces.
Modelling performed by Luo and Hanagud [238] assumes opening and closing ac-
tion at the region of delamination. Here it is considered that after delamination, partially
intact matrix and fibers still fill the delamination gap. The contact effect between the de-](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-51-320.jpg)
![24 Chapter 1. Introduction
laminated sub-laminates is modelled as a distributed nonlinear soft spring between them.
The spring is taken as nonlinear because when the delamination opens beyond some small
amplitude constraints, the spring effect becomes zero; on the other hand, when the vibra-
tion mode does not tend to open the delamination, the delaminated sub-laminates have
the same flexural displacements and slopes. This nonlinear spring is then simplified as a
combination of few linear springs. Such modelling provides better representation of the
practical problem. In many mechanical components under fatigue loading, such delami-
nation can induce non-linear modes in vibration characteristics. Related measurements
in metal beam with fatigue crack can be found in L´onard et al. [220].
e
Williams [398] has proposed a generalized theory of delaminated plates using a
global / local variation approach. This theory uses unique coupling between the global
and local displacement fields in two different length scales and is a generalization of
the earlier proposed theories based on ”layer-wise constant shear kinematics”. However,
these above global/local analysis are based on semi-analytic approach and difficult to
incorporate for transient dynamic and wave-based diagnostic problems.
In continuum mechanics, formulation for damage, one can use a mixed variational
formulation in the local coordinates to capture the localized stress field accurately. An
assumed stress field for the local damage region and assumed displacement for the global
region can generally be used (Pagano [300]). Here, one can consider an appropriate dam-
age dependent constitutive model (Coats and Harris [90]) based on continuum damage
mechanics for the local region, and equivalent fiber-matrix mixture constitutive model
(Reddy [324]) for the global region. However, such detailed model becomes computation-
ally intensive in the context of structural health monitoring and identification of damage.
Neglecting the relative rotation of the damaged and undamaged sections and treat-
ing the structures with Euler-Bernoulli or Kirchhoff type kinematics delamination models
have been verified experimentally by Purekar and Pines [315] in the context of wave prop-
agation in delaminated isotropic helicopter flexbeams, and by Luo and Hanagud [238] in
the context of natural frequency change in first order shear deformable composite beam
with delamination and the associated contact non-linearity in the low frequency dynam-
ics. Also, such simplified model can be found useful while modelling advanced composite
with stitching (Sankar and Zhu [337]) and various other types of material interfaces.
Considering axial-flexural-shear coupled wave propagation in composite beams, a
delaminated spectral element has been developed by Mahapatra [245], where the exact
dynamics of internal debonded sub-laminates was taken into account. In this formulation,](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-52-320.jpg)
![1.2. Background: Structural Health Monitoring 25
the internal FE nodal informations are condensed out leaving the delamination in between
the end nodes.
The restriction due to constant shear kinematics can be eliminated using the ap-
proach reported by Barbero and Reddy [29], where the layer-wise kinematics allows indi-
vidual sub-laminates to rotate by different amount. Similar approach has been used by
Kouchakzadeh and Sekine [191], where the formulation uses penalty function to impose ap-
propriate constraints at the interface between base-laminates and multiple sub-laminates.
In the works of Lee et al., [212] and Lee [213], the interface is assumed to translate and
rotate in a rigid-body mode. Thus, the normal plane is assumed continuous across the
base laminate thickness and is hence not affected by the stress discontinuity in the two
delaminated faces at the tip due to Mode-I and Mode-II stable delaminations. However,
this assumption may not be adequate, since strong coupling between the displacement
components may exist in case of asymmetric ply stacking, asymmetry among the sub-
laminates (due to inclusions of different material) and discontinuity in the stiffness and
inertia by foreign inclusions such as MEMS devices and integrated electronics.
Mahapatra [245] used spectral finite elements to model the individual sub-laminates,
base-laminates and strip inclusions. A layer-wise constant shear kinematics was imposed
by him at the interfaces of sub-laminates and base-laminates. Equilibrium of the system
was then obtained using multi-point constraints in Fourier domain associated with the
nodal displacement components and the force components at these interfaces allows to
model small local rotations of the individual sub-laminates and the base-laminates at
the interface in an average sense. Also, the model is a general one, where the length-
wise multiple delaminations of debonding between strip inclusions can be modelled easily.
Another advantage of the model is that both the frequency domain changes in phase and
amplitude of scattered waves in presence of delaminations or strip inclusions as well as
the time domain change in the response can be computed efficiently with the help of FFT
(Mahapatra et al., [244]).
1.2.5.3 Multiple Delaminations
The delaminations usually appear in several interfaces through the thickness of the lami-
nate (multiple delaminations), between plies of different fiber angles, and are oblong in the
direction of the fibers in the lower ply interface. The area of the delaminations increases
through the thickness away from the point of impact. Multiple delamination damage
identification in a composite plate using migration technique was proposed by Wang and](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-53-320.jpg)
![26 Chapter 1. Introduction
Yuan [388]. Chattopadhyay et al. [72] had studied time domain nonlinear dynamic re-
sponse of composite laminates using a refined layer-wise theory with piezoelectric sensors
and multiple delaminations, where the contact problem of delaminated interfacial surfaces
was modelled in terms of fictitious linear springs to provide an accurate description of the
transient behavior.
Mahapatra and Gopalakrishnan [247] had studied the effect of wave scattering and
power flow through multiple delaminations and strip inclusions in composite beams with
distributed friction at the inter-laminar region using spectral finite element formulation.
In this model [247], the multiple delaminated beams are divided into several sound beams
at the front of the delamination tip and the beam kinematics are then imposed. Each beam
is constrained to contact each other but a free mode assumption is generally considered
for linear analysis of the structure. Hence, each beam segment freely vibrates without
touching each other. The effect of bending-extension coupling induced from the presence
of delaminations can also be considered in the formulation.
1.2.6 Effective SHM Methodology
With the conventional NDE techniques, the complex mechanical system needs to be taken
out of service for inspection. Where as, modal domain approaches are less sensitive to the
small size damages. Small damages is sensitive to higher modes. To extract information
from higher modes smart actuator/sensor based SHM techniques are used. In very high
frequency (> 30kHz), global nature of the structure is remain unidentified. Approach in
frequency domain is suitable for linear system. Time domain approach can detect damage
with nonlinearity and hysteresis.
1.3 Background: Magnetostrictive Materials
Some magnetic materials (magnetostrictive) show elongation and contraction in the mag-
netization direction (Figure-1.1) due to an induced magnetic field. This is called the
magnetostriction, which is due to the switching of a large amount of magnetic domains
caused by spontaneous magnetization, below the Curie point of temperature. Thus mag-
netostrictive materials have the ability to convert magnetic energy into mechanical energy
and vice versa. This coupling between magnetic and mechanical energies is the transu-
dation capability that allows a magnetostrictive material to be used in both actuation
and sensing devices. Due to magnetostriction and its inverse effect (also called Villery](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-54-320.jpg)
![1.3. Background: Magnetostrictive Materials 27
MAGNETIC FIELD
S N
S N
N N S S
S N
S N N
S
N N N S S S
−Hg −Hc H=0 Hc Hg
MAGNETIC FIELD
Figure 1.1: Magnetostriction due to switching of magnetic domains.
effect)[382], magnetostrictive materials can be used both as an actuator and as well as
a sensor. References [369] and [260] performed extensive work related to electrostrictive
and piezoelectric phenomena which have similarities in form with the magnetostriction
phenomena.
1.3.1 Initial History
The first positive identification of a magnetostrictive effect was in 1842 [171] when James
Joule observed that a sample of nickel changed in length when it was magnetized. Sub-
sequently, cobalt, iron and alloys of these materials were found to show a significant
magnetostrictive properties with strains of about 50 parts per million (ppm). Apart from
magnetostriction and its inverse effect, other similar phenomenon known as the Wiede-
mann effect is present in such material, which is the twisting of the material when a helical
magnetic field is applied. Its inverse effect is called the Matteuci effect [258], which is the
creation of a helical field when the same material is subjected to a torque. One of the first
practical applications of magnetostriction was its use in SONAR devices in echo location
during the Second World War. Another early application was in torque sensing and these
applications are as important today as they were then. The nickel based materials used in
these devices had saturation magnetostriction values of 50 ppm. These strains are quite
low and hence have limited applications.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-55-320.jpg)
![28 Chapter 1. Introduction
1.3.2 Rare Earth Material Era
In the 1960s, the rare-earth elements terbium (T b) and dysprosium (Dy) were found to
have 100 times the magnetostrictive strains found in nickel alloys. However, because this
property occurs only at low temperatures, applications of these materials above ambient
temperature were not possible. The addition of iron to terbium and dysprosium to form
the compounds T bF e2 and DyF e2 brought the magnetostrictive properties to room tem-
perature. These materials individually required very large magnetic fields to generate a
considerable strain, which means magnetomechanical coupling coefficient is very small.
1.3.2.1 Giant Magnetostrictive Materials
The theoretical and experimental study of magnetostrictive materials has been the focus
of considerable research for many years. However, only the recent development of gi-
ant magnetostrictive materials (e.g. Terfenol-D) has enabled to produce sufficiently large
strains and forces to facilitate the use of these materials in actuators and sensors. This has
led to the application of magnetostrictive materials to such devices as micro-positioners,
vibration controller, sonar projectors and insulators, etc. Giant magnetostrictive material
has the ability to operate at high temperatures, and they give large strain for low mag-
netic field intensity and hence have very high coupling coefficient. By alloying the two
compounds T bF e2 and DyF e2 , it was found that the magnetic field required to produce
saturated strains were considerably reduced. The resulting alloy T b.27 Dy.73 F e1.95 (com-
mercially known as Terfenol-D) is at present the most widely used giant magnetostrictive
material. Terfenol-D is capable of strains as high as 1500ppm and, since the 1980’s,
it is commercially available for applications in many fields of science and engineering.
Terfenol-D is known to have high magnetostriction and low anisotropy energy. Therefore,
comparatively high strain amplitudes, approaching 1000ppm, can be obtained at low field
(<100kA/m).
1.3.3 Applications
Due to its capacity to sense and actuate, giant magnetostrictive materials is used in
wide varieties of applications. Choudhary and Meydan [85] designed accelerometer using
inverse effect of magnetostrictive material. Oduncu and Meydan [296] performed Bio-
chemical monitoring using magnetostrictive material. They determined the stress and
strain in bone and bone implant to assess fracture healing. Hattori et al. [149] studied](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-56-320.jpg)
![1.3. Background: Magnetostrictive Materials 29
low frequency elastic wave measurement using magnetostrictive material in the concrete
structure. Customary piezoelectric devices cannot produce such a low frequency elas-
tic wave efficiently. The magnetostrictive sensors have a unique characteristic such that
one can monitor stress waves without any direct physical contact. Because of this non-
contact measurement property of the sensors, these have been used in various applications
[397, 375, 184, 14, 299, 200, 201, 202, 203, 204, 205, 281, 282]. The measurement principle
of this sensor is based on the Villari effect [382]. Cho et al. [79] investigated the design
of an optimal configuration of the bias magnet assembly to maximize the voltage output
of a magnetostrictive sensor. Visone and Serpico [383] proposed a black box type hys-
teresis model for magnetostrictive materials that is constituted by suitable composition
of Preisach-like operators.
Hristoforou [161] given a review on the use of amorphous magnetostrictive wires
in delay lines for sensing applications. Christos et al. [253] developed an optimized
distributed field sensor based on magnetostrictive delay line response, suitable for NDT
purposes. Hristoforou et al. [162] demonstrated the application of magnetostrictive delay
line arrangement in thin film thickness determination, during film production.
1.3.3.1 Thin Film and MEMS
Magnetostrictive materials are very attractive for the production of microelectromechani-
cal systems (MEMS), such as micro robots, micro motors, etc. [22, 233]. Wetherhold and
Guerrero [394] studied the effects of the stress and magnetic states of magnetostrictive
multi-layered thin films for the case in which a bending strain was applied to the sub-
strate during film deposition and then released. Jain et al. [168] used the free standing
magnetostrictive thick or thin film sensor for remote query of temperature and humidity
for time-varying external magnetic field. From the oscillations at resonant frequency of
the sensor, an acoustic wave is generated, which was detected remotely from the test
area by a microphone. Gehring et al. [129] calculated the deflection for a magnetoelastic
cantilever for an arbitrary ratio of thickness of film and substrate. Grimes et al. [141]
considered magnetoelastic thin film sensors as the magnetic analog of surface acoustic
wave sensors, with the characteristic resonant frequency of the magnetoelastic sensor to
monitor the change in the response with different environmental parameters. Pasquale et
al. [307] measured the magnetic properties of a set of (T bx F e1−x ) magnetostrictive thin
films under applied stress in a cantilever configuration with complementary flux metric
and magneto-optic Kerr effect methods.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-57-320.jpg)
![30 Chapter 1. Introduction
1.3.3.2 Thick Film, Magnetostrictive Particle Composite
Kouzoudis and Grimes [98] studied the response mechanism of magnetoelastic thick-film
sensors and have shown that the characteristic resonant frequency is a function of both
pressure and the mechanical stress. Armstrong [23] presented nonlinear magnetoelastic
behavior of magnetically dilute magnetostrictive particulate composites. To get this rela-
tionship, he assumed a uniform external magnetic field, which was operated over a large
number of well-distributed, crystallographically and globally parallel ellipsoidal magne-
tostrictive particles encased in an elastic, non-magnetic composite matrix. Saito et al.
[336] investigated the decrease of magnetization in positive magnetostrictive materials.
Giurgiutiu et al. [134] presented theoretical and experimental result from the study of a
MS-tagged fiber-reinforced composite beam under bending. Lanotte et al. [209] studied
the potentiality of composite elastic magnets as novel materials for sensors and actuators.
1.3.4 Structural Applications
Subramanian [353] presented an analytical model for a simply supported symmetric lam-
inated beams embedded with magnetostrictive layers based on the higher order shear
deformation theory. Chakraborty and Tomlinson [65] investigated the suitability of trans-
ferring appreciable amounts of magnetic energy to external media using the property of
change of magnetization of a Terfenol-D rod due to an applied force under a defined pre-
stress level. Experimental investigations was also conducted on a Terfenol-D monolithic
rod under different levels of constant pre-stress to quantitatively estimate the change in
magnetic induction and measured that the change in magnetic induction is very small
compared with that for a permanent magnet. Pan and Heyliger [301] derived analytical
solutions for the cylindrical bending of multilayered, linear, and anisotropic magneto-
electro-elastic plates under simple-supported edge conditions. Magnetostrictive material
has found its way in many structural applications such as vibration control, noise control
and structural health monitoring (see Section-1.2.2.4).
1.3.4.1 Vibration and Noise Suppression
Reddy and Barbosa [326] investigated laminated composite beams containing magne-
tostrictive layers modelled as distributed parameter systems to control the vibration sup-
pression. The effect of material properties, lamination scheme and placement of the
magnetostrictive layers on vibration suppression was investigated. Nakamura et al. [286]](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-58-320.jpg)
![1.4. Artificial Neural Network 31
developed an active six degrees-of-freedom micro-vibration control system using giant
magnetostrictive actuators. Pelinescu and Balachandran [309] presented analytical inves-
tigations conducted into active control of longitudinal and flexural vibrations transmitted
through a cylindrical strut fitted with piezoelectric and magnetostrictive actuators. Fenn
et al. [119] developed a vibration reduction system for the UH-60A helicopter using mag-
netostrictive actuators drive with four trailing edge flaps on each blade. Anjanappa and
Bi [19] developed an integrated model to analyze the vibration suppression capability of a
cantilever beam embedded with magnetostrictive mini actuator using the Euler-Bernoulli
beam theory and strain energy conservation principle. Anjanappa and Bi [18] also in-
vestigated the magnetostrictive mini actuator for distributed applications and further
developed theoretical framework based on two-dimensional thermal analysis modifying
the general form of constitutive equation for a magnetostrictive material to include ther-
mal effects coming from resistive heating of a coil. Qian et al. [316] investigated vibration
control for simply supported laminated composite shells with smart plies acting as sensor
and actuator layers through magnetostrictive actuation. Pradhan et al. [311] formu-
lated a theory for a laminated plate with embedded magnetostrictive layers based on the
first order shear deformation theory (FSDT) and developed its analytical solution for
simply-supported boundary conditions based on the FSDT, and the analytical solution
for simply-supported plates is based on the Navier solution approach.
The effects of the material properties of the lamina, lamination scheme, and place-
ment of the magnetostrictive layers on the vibration suppression time have been examined
by many researchers. Brennan et al. [47] demonstrated the practical viability of a non-
intrusive magnetostrictive actuator and sensor for the active control of fluid-waves in a
pipe. Zheng et al. [426] presented active and passive magnetic constrained layer damping
treatment for controlling vibration of three-layer clamped clamped beams. Mahapatra et
al. [246] used this material to suppress all the frequency gear box noise components for
active noise control in helicopter passenger cabin.
1.4 Artificial Neural Network
Studies of Artificial Neural Network (ANN) have been motivated to imitate the way that
the brain operates. Neural networks learn by example, which gathers representative data,
and then invokes training algorithms to automatically learn the structure of the data.
Neural networks, with their remarkable ability to derive meaning from complicated or](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-59-320.jpg)

![1.4. Artificial Neural Network 33
the threshold subtracted, to compose the activation of the neuron. The activation signal
is passed through an activation function (also known as a transfer function) to produce
the output of the neuron. If the step activation function is used (i.e., the neuron’s output
is 0 if the input is less than zero, and the output is 1 if the input is greater than or equal
to 0) then the neuron acts just like the biological neuron described earlier (subtracting
the threshold from the weighted sum and comparing with zero is equivalent to comparing
the weighted sum to the threshold). Actually, the step function is rarely used in artificial
neural networks.
1.4.3 Historical Background
McCulloch and Pitts [265] developed models of neural networks based on their under-
standing of neurology in 1943 and shown that an artificial neural network, in theory,
could compute any mathematical or logical function. Neural network research was then
continued by Hebb [153], who proposed a mechanism for learning in biological neurons.
These models made several assumptions about how neurons worked. In 1958 Rosenblatt
[333] designed and developed the perceptron and demonstrated the ability of a perceptron
network to recognize different patterns. The perceptron had three layers with the middle
layer known as the association layer. This system could learn to connect or associate a
given input to a random output unit. Another system was the ADALINE (ADAptive
LINear Element), which was developed in 1960 by Widrow and Hoff [395]. The method
used for learning was different to that of the Perceptron; it employed the Least-Mean-
Squares (LMS) learning rule. Widrow-Hoff learning algorithm is that of gradient descent
algorithm, aimed at minimizing the error of the network.
Though, between 1960 and 1980 interest in neural networks dropped because of lack
of new ideas and computational power, in 1972 Kohonen [188, 189] and Anderson [15]
independently and separately developed new neural networks, which were able to act as
memories. In 1982, Hopfield [160] introduced a new type of network. Since the 1980s,
with the help of new personal computers and workstations, neural network development
and research has dramatically increased. One of the most important developments during
this time was the introduction of the backpropagation algorithm developed by Rumelhart
et al. [334].](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-61-320.jpg)

![1.4. Artificial Neural Network 35
the desired outputs. Errors are then calculated, causing the system to adjust the
weights which control the network.
2. Unsupervised: In unsupervised training, the network is provided with inputs but
not with the desired outputs. The system itself must then decide what features it
will use to group the input data. This is often referred to as self-organization or
adaption.
3. Reinforcement learning: In the reinforcement learning model, an agent is connected
to its environment via perception and action.
1.4.4.4 Applications
1. Classification: Neural networks can be used successfully for pattern recognition and
classification on data sets of realistic size. Commercially important examples are
classification of fingerprints and hand printed characters.
2. Clustering: Clustering could be defined as ”the process of organizing objects into
groups whose members are similar in some way.” Clustering can be considered the
most important unsupervised learning problem
3. Function approximation: ANN can be used to approximate a function.
4. Prediction: Different series predictions can be performed by ANN.
1.4.5 Multi Layer Perceptrons (MLP)
The Multi-layer perceptron (MLP) is the most widely used type of neural network. It is
both simple and based on solid mathematical grounds. An MLP is a network of simple
neurons called perceptrons. The basic concept of a single perceptron was introduced by
Rosenblatt [333] in 1958. The perceptron computes a single output from multiple real-
valued inputs by forming a linear combination according to its input weights and then
possibly putting the output through some nonlinear activation function. Mathematically
this can be written as
n
y = ϕ( wi xi + b) = ϕ(wT x + b)
i=1
where w denotes the vector of weights, x is the vector of inputs, b is the bias and ϕ is the
activation function. The original Rosenblatt’s perceptron used a Heaviside step function as](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-63-320.jpg)

![1.4. Artificial Neural Network 37
falls into one of four categories:
1. Linear (or ramp): For linear units, the output activity is proportional to the total
weighted output.
2. Threshold: For threshold units, the output are set at one of the two levels, depending
on whether the total input is greater than or less than some threshold value.
3. Logistic sigmoid (1/(1 + e−x )): For sigmoid units, the output varies continuously
but not linearly as the input changes.
4. Hyperbolic tangent (tanh(x)): Logistic sigmoid and hyperbolic tangent are related
by (tanh(x) + 1)/2 = 1/(1 + e−2x ).
1.4.6 The Back-propagation Algorithm
The supervised learning problem of the MLP can be solved with the Back-Propagation
(BP) algorithm. While, there are a large number of ANN types and architectures, neural
mapping is generally been associated with the so-called back propagation network (Rumel-
hart et al. [334]). This network, in general, is organized in three types of layers: an input
layer, some hidden layers and an output layer. The algorithm consists of two steps. In
the forward pass, the predicted outputs corresponding to the given inputs are evaluated
as in Equation-(1.1). In the backward pass, partial derivatives of the error with respect
to the different parameters are propagated back through the network. The chain rule of
differentiation gives very similar computational rules for the backward pass as the ones
in the forward pass. The network weights can then be adapted using any gradient-based
optimization algorithm. The whole process is iterated until the weights have converged.
The structure of a network is determined by a number of factors including the nature
of the data to be mapped. For instance, there is usually an input unit for each input
variable and an output for each output variable of the data. The number of hidden units
(and layers) is typically determined experimentally on the basis of training results.
1.4.6.1 Training of BP ANN
The training of a BP neural network is a two-step procedure [334]. In the first step, the
network propagates input through each layer until an output is generated. The error
between the output and the target output is then computed. In the second step, the](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-65-320.jpg)




![Chapter 2
Constitutive relationship of
Magnetostrictive Materials
2.1 Introduction
Constitutive relationship of magnetostrictive materials consists of a sensing and an actua-
tion equation. In sensing equation magnetic flux density is a function of applied magnetic
field and stress, and in actuation equation, strain is function of applied magnetic field and
stress. Both sensing and actuation equations are coupled through magneto-mechanical
coupling coefficient. Hence, to obtain the correct constitutive law of this material, both
equations need to be solved simultaneously. This chapter gives the complete details of
the numerical characterization of constitutive relations of magnetostrictive material such
as Terfenol-D.
2.1.1 Existing Literature
Existing literature in this particular area is limited. However, there are some works
that are very relevant, which is used in this chapter for the constitutive model develop-
ment. Anjanappa and Wu [17] developed a mathematical model for a magnetostrictive
particulate actuator based on the magnetoelastic material property. Ackerman et al.
[3] developed an analytical approach for formulation of input-output representations for
magnetostrictive actuators through the application of an impedance modelling method,
which included the mechanical dynamics and the electro-magneto-mechanical interaction
of the actuator device. Anhysteretic nonlinear constitutive relationships was studied by
Krishna Murty et al. [192], where the magnetostriction was considered as fourth order
polynomial of applied magnetic field for different stress level. Dapino et al. [95] mod-
elled the strains and forces generated by magnetostrictive transducers considering both
43](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-71-320.jpg)
![44 Chapter 2. Constitutive relationship of Magnetostrictive Materials
the rotation of magnetic moments and the elastic vibrations in the transducer. Waki-
waka et al. [384] studied the effect of the magnetic bias for which largest linear range
was available depending on each pre-stress level. Kannan and Dasgupta [174] developed
quasi-static Galerkin finite-element theory for modelling magneto-mechanical interactions
at the macroscopic level considering body forces and coupled constitutive nonlinearities.
Kondo [190] examined the dynamic behavior of giant magnetostrictive materials.
2.1.1.1 Coupling between Actuation and Sensing Equations
Analysis of smart structures using magnetostrictive materials are generally performed us-
ing uncoupled models. Uncoupled models are based on the assumption that the magnetic
field within the magnetostrictive material is proportional to the electric coil current times
the number of coil turn per unit length (coil constant). Due to this assumption, actuation
and sensing equations gets uncoupled. For an actuator, the strain due to magnetic field
(which is proportional to coil current) is incorporated as the equivalent nodal load in the
finite element model for calculating the block force. Thus, with this procedure, analysis is
carried out without taking smart degrees of freedom in the finite element model. Similarly
for a sensor, where generally coil current is assumed zero, the magnetic flux density is
proportional to mechanical stress, which can be calculated from the finite element results
through post-processing. This assumption on magnetic field, leads to the violation of flux
line continuity, which is one of the four Maxwell’s equations in electromagnetism. To sat-
isfy Maxwell equation of flux conservation and the associated constitutive relationships,
the magnetic field should become a function of mechanical condition of the material and
this is called coupled formulation.
The constitutive model for a magnetostrictive material is essentially a coupled one.
That is, the strains and magnetic flux density are developed due to both mechanical
stress and magnetic field intensity. In coupled model, it is considered that magnetic flux
density and/or strain of the material are functions of stress and magnetic field, without
any additional assumption on magnetic field, unlike the uncoupled model. Benbouzid
et al. modelled the static [34] and dynamic [36] behavior of the nonlinear magneto-
elastic medium for magneto-static case using finite element method. Magneto-mechanical
coupling was incorporated considering both permeability and elastic modulus as functions
of stress and magnetic field. However, all these works do not provide a convenient way
for analysis of magnetostrictive smart structure, when the coupling feature is considered.
In this chapter, coupled features of magnetostrictive materials are used in a finite element](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-72-320.jpg)
![2.1. Introduction 45
formulation, which has both magnetic and mechanical degrees as unknown degrees of
freedom. In addition, it is shown that the magnetic field is not proportional of applied
coil current (which is the assumption of the uncoupled model), and it depends on the
mechanical stress on the magnetostrictive material. This chapter also shows that the
coupled model preserve the flux line continuity, which is one of the drawback of uncoupled
model.
2.1.1.2 Nonlinearity of Magnetostrictive Materials
The constitutive relations of magnetostrictive materials are essentially nonlinear [52]. The
prediction of behavior of magnetostrictive material, in general, is extremely complicated
due to its hysteretic non-linear character. In structural application, due to these nonlinear
material properties, modelling of the system will also become nonlinear. Hence to model
the exact nonlinear behavior of the structure, modelling of these nonlinear properties of
magnetostrictive materials is essential.
Magnetostriction, which is the strain due to magnetic field, is a nonlinear function
of applied magnetic field. At low value of magnetic field, the slope of the curve is low,
while at medium value of magnetic field, the slope is high and again at high magnetic
field levels, the slope becomes low [52]. In addition, these magnetic field-magnetostriction
curves are different for different compressive stress level. Hence, nonlinear modelling of
magnetostriction in terms of prestress level and applied magnetic field is a difficult task.
However, the nonlinear representation of permeability in terms of magnetic field and
stress level is addressable. Also, the strain always remains positive for either positive or
negative applied field for positive magnetostriction. Therefore, the vibration frequency
will be twice that of the magnetic field if the magnetostrictive material is subjected to an
alternating current. This is the so-called double frequency effect. However, this double
frequency effect in actuation equation is generally bypassed using bias current to keep the
coil current always positive.
Traditionally, the nonlinear behavior of magnetostrictive material is studied using
uncoupled model. In uncoupled model, nonlinear actuation and sensing properties are
examined separately. For actuation, the magnetostriction for different stress level at
a particular applied magnetic field is studied. Similarly, for sensing application, the
generated magnetic flux density for different applied stress levels, are studied. Earlier
study to model uncoupled nonlinear actuation of magnetostrictive material was done in
reference [192] by considering a fourth order polynomial of magnetic field for each stress](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-73-320.jpg)
![46 Chapter 2. Constitutive relationship of Magnetostrictive Materials
level. In this approach, stress level for which curve is not available, the coefficients of the
curve will have to be interpolated from the coefficients of nearest upper and lower stress
level curves. Similar approach is used in this chapter to study the nonlinear behavior of
both coupled and uncoupled formulation. In this chapter, this nonlinear representation is
modelled using different techniques such as, polynomial curve fitting and artificial neural
network.
2.1.1.3 Hysteresis of Magnetostrictive Materials
Hysteresis behavior of magnetic material can be described by a curve having three parts.
First part represents the linear material behavior, the second part represents non-linear
material behavior including saturation, and the third part describes hysteresis effects like
remanence, coercivity, static losses and accommodation. The first analytic model of fer-
romagnetic hysteresis was proposed by Rayleigh [323]. Adly, and Hafiz, [7] constructed
and identified hysteresis of magnetostriction using Preisach-type model through experi-
mental training data to a modular discrete Hopfield neural network–linear neural network
combination. Calkins, et al. [53] addresses the modelling of hysteresis in magnetostrictive
transducers based on the Jiles-Atherton mean field model for ferromagnetic hysteresis
in combination with a quadratic moment rotation model for magnetostriction. Adly, et
al. [11] presented an approach for simulating 1-D magnetostriction using 2-D anisotropic
Preisach-type models, where measured flux density versus field and strain versus field
curves for different stress values was taken into account for identification of the model.
Adly, and Hafiz, [8] proposed that artificial neural network be used as a tool to accomplish
the identification task of classical Preisach model, where the congruency property is not
exactly valid and hence required more appropriate experimental data during the identifica-
tion stage to improve the model accuracy. Adly, and Mayergoyz, [9] presented anisotropic
vector Preisach-type hysteresis models of magnetostrictive material for simulating field-
stress effects on magnetic materials. Adly, et al. [10] suggested an identification process of
two-dimensional Preisach model for modelling of one-dimensional magnetostriction using
neural network. Debruyne, et al. [96] proposed a method to characterize the Preisach
model of hysteresis phenomenon of magnetic material by taking a normal distribution law
for the switching field density. Benabou, et al. [33] presented and implemented in a finite
element code, Preisach and the Jiles-Atherton (J-A) models of hysteresis and compared
these models in terms of accuracy, numerical implementation and computational effort.
Yu, et al. [417] presented the rate-dependent hysteresis property by introducing the de-](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-74-320.jpg)
![2.1. Introduction 47
pendence of the Preisach function on the input variation rate to adjust the relationship
of hysteresis loop on the input variation rate for different hysteresis systems. Cheng,
et al. [76] proposed a dynamic model which considers the eddy current, hysteresis and
anomalous losses based on Preisach modelling. Ktena, et al. [193] used a least-squares
parameter fitting procedure for one-dimensional (1D) and two-dimensional (2D) formu-
lations of the Preisach hysteresis in ferromagnets, and shape memory alloys. Ktena, et
al. [194] identified hysteresis using data from a major hysteresis curve and a least-squares
error minimization procedure for the parameters of the characteristic density. Dupre, et
al. [112] modelled the hysteresis of material like the SiFe-alloys using the Preisach theory,
took the magnetization as input to the model. Natale, et al. [288] proposed the identi-
fication and compensation of the hysteretic behavior of Terfenol-D actuator by applying
the classical Preisach model, whose identification procedure is performed by adopting of
both a fuzzy approximator and a feed-forward neural network. Ragusa [318] presented an
analytical computation of the factorized distribution function by moving Preisach model
starting from a set of measured symmetrical loops. A probabilistic model for magne-
tostrictive and magnetic hysteresis in Terfenol-D compounds is proposed by Armstrong
[24]. The critical stresses that eliminate hysteresis in magnetostrictive materials were de-
termined by Cullen et al. [93] for coherent magnetization reversal. From these works, it
can be concluded that the prediction of behavior of magnetostrictive material, in general,
is extremely complicated due to its hysteretic non-linear character.
The main goal of this chapter is to numerically characterize the constitutive model of
the magnetostrictive material for its use in structural health monitoring applications. One
of the main issues in the design of these magnetostrictive sensors/actuators is to predict
its behavior under various mechanical and/or magnetic excitation conditions through
the constitutive relationship of material. Anhysteretic sensing and actuation properties
of magnetostrictive materials (Terfenol-D) are taken into consideration in the structural
analysis for singled valued sensing and actuation. Hence only anhysteretic models of
magnetostrictive material are studied in this chapter.
The chapter is organized as follows. In Section-2.2, uncoupled formulation is de-
veloped for magnetostrictive materials. The anhysteretic modelling of magnetostrictive
material for linear-uncoupled and nonlinear-uncoupled constitutive relationships is given.
Subsequently, coupled formulations for both linear and nonlinear are given in Section-2.3
for magnetostrictive materials. For both linear and nonlinear models, total mechanical
and magnetic energy is calculated for a magnetostrictive rod. Hamiltonian principle is](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-75-320.jpg)
![48 Chapter 2. Constitutive relationship of Magnetostrictive Materials
used to get the equations for magnetic and mechanical degrees of freedoms. Nonlinear
modelling of magnetostrictive material is studied with polynomial approach as well as
ANN approach. Finally, the findings of this chapter are summarized in Section-2.4.
2.2 Uncoupled Constitutive Model
Application of magnetic field causes strain in the magnetostrictive material (Terfenol-D)
and hence the stress, which changes magnetization of the material. As described by Butler
[52], Moffett et al [273], and Hall and Flatau [142], the three-dimensional linear coupling
constitutive relationship between magnetic and mechanical quantities for magnetostrictive
material are given by
{ } = [S (H) ]{σ} + [d]T {H} (2.1)
{B} = [µ(σ) ]{H} + [d]{σ} (2.2)
where { } and {σ} are strain and stress respectively. [S(H) ] represents elastic com-
pliance measured at constant {H} and [µ(σ) ] represents the permeability measured at
constant stress {σ} . Here [d] is the magneto-mechanical coupling coefficient, which pro-
vides a measure of the coupling between the mechanical strain and magnetic field. In
general, [S], [d] and [µσ ] are nonlinear as they depend upon {σ} and {H}. However,
reasonable response estimation can be obtained by treating them as linear [52].
Equation-(2.2) is often referred to as the converse effect and Equation-(2.1) is known
as the direct effect. These equations are traditionally used for sensing and actuation
purpose. It should be noted that the elastic constants used correspond to the fixed
magnetic field values and the permeability correspond the fixed stress values. Here we
propose to use an ANN model to characterize the constitutive model and compare the
solution with the reference [192].
Here the experimental data for training of ANN, is taken from Etrema manual [52]
for Terfenol-D, a giant magnetostrictive material. Experimental data given in the manual
for two different set of curves, namely the of magnetostriction - magnetic field variation for
different stress level is shown in Figure-2.1 and Figure-2.2, and the stress - strain curves
for different magnetic field levels is shown in Figure-2.3 and Figure-2.4. Here uncoupled
constitutive relationship of magnetostrictive material is considered for the study. Anal-
ysis of smart structures using magnetostrictive materials as either sensors or actuators
has traditionally been performed using uncoupled models. Uncoupled models make the
assumption that the magnetic field within the magnetostrictive material is constant and](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-76-320.jpg)
![2.2. Uncoupled Constitutive Model 49
x 10
−3 Magnetostriction for Different Stress Level
1.4
1.2
1
Magnetostriction
0.8
0.6
0.4
6.9 MPa
9.6
12.4
0.2 15.1
17.9
20.7
24.1
0
0 2 4 6 8 10 12
Magnetic Field (Amp/m) x 10
4
Figure 2.1: Magnetostriction vs. magnetic field supplied by Etrema
proportional to the product of electric coil current and the number of coil turn per unit
length. Magnetostriction λ = [d]T {H} is the strain due to magnetic field, which is the
second term in the Equation-(2.1). Hence, the strain induced by an actuator and the
magnetic flux density output of a sensor, are described by two uncoupled equation. This
makes analysis of a smart structure relatively simpler. For this uncoupled model, both
linear and nonlinear analysis is performed. In the linear model, the magnetomechanical-
coupling term is assumed as constant. But generally it is a nonlinear function of magnetic
field and stress level. In the nonlinear model, the magnetostriction is modelled with a
three layer artificial neural network as it can approximate any nonlinear input-output
relationships through its universal approximation theorem [150].
From experimental data [52], only longitudinal component of magnetostriction due](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-77-320.jpg)
![50 Chapter 2. Constitutive relationship of Magnetostrictive Materials
x 10
−8 Magneto−mech. Coupling for Diff Stress
3.5
6.9 MPa
9.6
12.4
3 15.1
Magneto−mechanical coupling (m/amp)
17.9
20.7
24.1
2.5
2
1.5
1
0.5
0
0 2 4 6 8 10 12
Magnetic Field (Amp/m) x 10
4
Figure 2.2: Magneto-mechanical coupling vs. magnetic field supplied by Etrema
to longitudinally applied magnetic field is present, and hence only d33 component is avail-
able. Magnetostriction in this experiment is d33 H3 . All other component of [d] matrix is
considered equal to zero. In the absence of sensing experimental data, where an applica-
tion of magnetic field and stress will produce magnetic flux form magnetostrictive sensor
(due it its inverse magnetostrictive effect, Villery Effect), sensing equation is not studied
here. In addition, actuation data for tensile stress level is also not available in the manual.
2.2.1 Linear Uncoupled Model
Although magnetostriction is highly nonlinear with magnetic field and stress, sometimes
the linear actuation model is quite sufficient especially in vibration and noise control ap-
plication. To get the linear actuation from this highly nonlinear property, some magnetic](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-78-320.jpg)
![2.2. Uncoupled Constitutive Model 51
x 10
7 Stress vs. Strain for Bias fields.
14
0 Oe
100 Oe
200 Oe
12 300 Oe
400 Oe
500 Oe
600 Oe
700 Oe
10 800 Oe
900 Oe
1000 Oe
1200 Oe
Stress (Pa)
8 1500 Oe
6
4
2
0
0 0.5 1 1.5 2 2.5 3 3.5
Strain x 10
−3
Figure 2.3: Stress vs. strain relationship for different magnetic field level [Etrema]
x 10
10 Stress vs. strain Curves for Bias Fields.
10
9
8
7
Modulus (Pa)
6
5
0 Oe
4 100 Oe
200 Oe
300 Oe
3 400 Oe
500 Oe
600 Oe
2 700 Oe
800 Oe
900 Oe
1 1000 Oe
1200 Oe
1500 Oe
0
0 0.5 1 1.5 2 2.5 3 3.5
Strain x 10
−3
Figure 2.4: Elasticity vs. strain relationship for different magnetic field level [Etrema]](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-79-320.jpg)
![52 Chapter 2. Constitutive relationship of Magnetostrictive Materials
and mechanical bias is used, which will shift the starting point of curves in the middle of
linear range. Hence, there is a necessity for calculation of optimum values of bias mag-
netic field and bias stress to give maximum linear range of actuation and maximum value
of tangential coupling coefficient [384]. This is a multi objective optimization problem
where maximum range of linearity as well as tangential coupling coefficient is required.
In addition, minimization of bias magnetic field and bias stress level may be other design
criteria. If permanent magnets are used for bias magnetic field, energy requirement for
constant DC current will not be required.
2.2.1.1 Actuator Design - Some Issues
It is described that the designed actuator are required to satisfy the following two consid-
eration; one, it has to behave as linear as possible, and the second; it should be efficient.
The issues relating to these two criteria are discussed below.
2.2.1.2 Linearity
Figure-2.5 and Figure-2.6 give the variation of tangential coupling and coupling coefficient
with the bias field obtained by polynomial fitting of experimental data [52], and it is shown
that for 15.1 MPa bias stress level, the linear range of actuator is from 0 to 40kA/m with
tangential coupling value 2e-8 m/amp, and for 24.1 MPa bias stress linear range is from
50 to 70kAmp/m with tangential coupling value 1.8e-8 m/Amp. Hence, 15.1 MPa stress
bias with 30 kA/m bias magnetic field is the optimal value for having higher tangential
coupling. But in general for any application, the stress level of actuator will not be
constant and hence this study will not be effective if the stress level changes.
2.2.1.3 Efficiency
The efficiency of actuator is defined as the ratio of mechanical energy to the magnetic
energy. Hence, the increased value of magneto-mechanical coupling coefficient will increase
the efficiency of actuator. Considering bias magnetic field will be obtained by a permanent
magnet, the optimum bias magnet required for higher efficiency of actuator will simply be
equal to the average magneto-mechanical coupling coefficient. The optimum value of bias
magnetic field for the average magneto-mechanical coupling coefficient is given in Figure-
2.6. Here, the average magneto-mechanical coupling coefficient is calculated for different
stress level and different bias magnetic field. It is shown that for low stressed actuator,
low strength bias magnet is optimum, while as for high stressed actuator, high strength](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-80-320.jpg)

![54 Chapter 2. Constitutive relationship of Magnetostrictive Materials
bias magnet is optimum for increased value of average coupling coefficient. These average
values for different stress level is again averaged over the stress level and shown that the
strength of 20-kA/m bias magnet is optimum for efficiency of magnetostrictive actuator
in varied stress level. Average magnetomechanical coefficient with zero magnetic bias is
14.67e-9 (m/amp) (shown in Figure-2.6). This value is generally considered in uncoupled,
linear, bias-less magnetostrictive actuator. From Figure-2.1, it is clear that the linear
model is an approximation from the real behavior of the actuator.
2.2.2 Polynomial Approach
In the polynomial approach [192], every magnetostriction-magnetic field intensity curve
is represented by a fourth order polynomial curve given by.
λ = α0 + α1 H + α2 H 2 + α3 H 3 + α4 H 4 (2.3)
Where, λ represent the magnetostriction and, H is the applied magnetic field. The
constants α0 − α4 are evaluated for each stress level using the data supplied by Etrema
manual, and their values are listed in Table-2.1. A linear interpolation of functional
form for these constants α1 − α4 is estimated as a function of σ, which is used whenever
integration with σ is required in this analysis. This is given by
αi = αi1 σ < σ1 (2.4)
αi(j+1) − αij
αij (σ) = αij + (σ − σj ) σj < σ < σj+1
σj+1 − σj
i = 0, 1, 2, 3, 4 j = 1, 2, 3, 4, ...6
The values of αij ’s and σj ’s are given in Table-2.1. The magnetomechanical constant
Table 2.1: Constants α0 through α4 for different prestress levels [192].
σj , M P a 6.9 9.6 12.4 17.9 24.1 38.0
α0j -50.2987 -81.3171 -58.7017 -2.1391 22.0131 -0.4968
α1j 3.7301 3.2017 1.9530 -0.0931 -0.5268 0.2066
α2j -4.7e-3 -2.3e-3 9.72e-4 5.1e-3 3.6e-3 -3.7006e-4
α3j 2.8406e-6 4.0316e-7 -2.4375e-6 -5.2425e-6 -2.5378e-6 1.3335e-6
α4j -6.4174e-10 1.1572e-10 9.095e-10 1.5458e-9 4.9722e-10 -5.7574e-10
now can be expressed by differentiating Equation-(2.3). This is given by
d = α1 + 2α2 H + 3α3 H 2 + 4α4 H 3 (2.5)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-82-320.jpg)
![2.2. Uncoupled Constitutive Model 55
2.2.3 ANN Model
As mentioned earlier, magnetostriction varies with of applied magnetic field and stress
level. In this study, the magnetostriction is modelled using a three layer artificial neural
network (ANN) trained by back propagation algorithm for compressive stress level. In
input layer, two input nodes are used; one for applied magnetic field and other for stress
level and in output layer, one output node for magnetostriction is used. This artificial
neural network is trained using the experimental data given in Etrema manual [52] for
different compressive stress level. Due to non-availability of experimental data in tensile
stress level, magnetostriction for tensile stress level is not modelled here. As magnetostric-
tion depends upon stress level and applied magnetic field, using trained neural network,
the corresponding magnetostriction (d33 H3 ) is calculated for applied magnetic field and
stress level.
2.2.3.1 Network Architecture
The network parameters are determined, as is common practice, through trial and error.
This includes the number of layers, the number of nodes in hidden layers and the learning
rates. Number of hidden layers is assumed as one to simplify the study and reduce the
size of network architecture. Hence, the network used consisted of three layers: one input
layer of two neurons (one for each input variable, stress and magnetic field), one hidden
layer of different no of neurons (nodes) and one output layer of one neuron, which in the
present case represents magnetostriction. A study for the performance of network is done
to determine the effect of number of nodes in the hidden layer. Similarly, the effect of
learning rate and learning algorithm is also studied.
2.2.3.2 Study on Number of Nodes in Hidden Layer
Although the increasing number of hidden layer nodes will represent the actuation non-
linearity more accurately, the floating point operation and storage requirement for the
evaluation of magnetostriction for different stress levels and applied magnetic fields using
the trained architecture will also increase. Hence, there will be a tradeoff between the
number of nodes in hidden layer and performance of trained network from the training
and validation samples. Performance of the network can be assessed if one can measure
the error associated with the learning performance and the strains for different number
of nodes in the hidden layer. These are plotted in Figure-2.7 and Figure-2.8. From the](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-83-320.jpg)







![2.2. Uncoupled Constitutive Model 63
(λ − λmean )
λn = (2.8)
(max|λ| − λmean )
In Equation-(2.6), σn is the normalized stress and σmean is mean stress of training samples.
The value of σmean and (max|σ| − σmean ) are 1.5243X107 and 8.857X106 Pa respectively.
Similarly Hn is normalized magnetic field, Hmean is mean magnetic field of training sam-
ples. The value of Hmean and (max|H| − Hmean ) in Equation-(2.7) are both 652 Oe.
Normalized magnetostriction λn is the output of network, from which magnetostriction
is calculated using Equation-(2.8). Where the value of λmean and (max|λ| − λmean ) are
both 0.798X10−3 .
Table 2.2: Connection between input layer and hidden layer.
Hidden Layer Nodes 1 2 3 4
σn -.11946E+01 -.33016E+00 .14013E+01 .14978E+01
Hn .29959E+01 -.28768E+00 -.15922E+01 .19209E+00
Input Bias .128112E+01 -.680953E+00 -.916353E-02 .187534E+01
Table 2.3: Connection between hidden layer and output layer.
Hidden Layer Nodes 1 2 3 4 output bias
λn 1.1240 -.65999 -.63945 1.0767 -1.27577
Figure-2.17 and Figure-2.18 gives the magnetostriction and magneto-mechanical
coupling coefficient for different stress level (from 6.9MPa to 24.1 MPa) according to the
present neural network model. As the network is trained taking data from all the stress
level given in the manual [52], and the network is not validated for different stress level
not given in the manual, there is a possibility of over training of network in other stress
level. Networks become over trained while modelling noises in the responses, which are
not desirable. However, by looking at the output of network for twenty intermediate stress
level shown in these figures, it can be concluded that the network is not over trained.
2.2.4 Comparative Study with Polynomial Representation
Earlier study to model nonlinear actuation of magnetostrictive material was done
considering a fourth order polynomial of magnetic field for each stress level [192]. The
fourth order polynomial representation of magnetostriction required five real parameters
for each curve represented in each stress level. To compute the magnetostriction from a](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-91-320.jpg)


![66 Chapter 2. Constitutive relationship of Magnetostrictive Materials
x 10
−3 Compare of Diff. Approach.
1.4
Polynomial
ANN
Experimental
1.2
1
Magnetostriction
0.8 6.9 MPa 15.1 MPa
0.6 24.1 MPa
0.4
0.2
0
0 2 4 6 8 10 12
Magnetic Field (Amp/m) x 10
4
Figure 2.19: Magnetostriction for different stress level.
unit length. Hence actuation and sensing problems are solved by two uncoupled equations,
which are given by the last part of Equation-(2.1) and Equation-(2.2), respectively. This
makes the analysis relatively simple; however this method has its limitations. It is quite
well known that [S], [d] and [µ] all depend on stress level and magnetic field. In the pres-
ence of mechanical loads, the stress changes and so is the magnetic field. Estimating the
constitutive properties using uncoupled model in such cases will give inaccurate predic-
tions. Hence, the constitutive model should be represented by a pair of coupled equations
given by Equations-(2.1) & (2.2) to predict the mechanical and magnetic response. It
is therefore necessary to simultaneously solve for both the magnetic response as well as
the mechanical response regardless of whether the magnetostrictive material is being used
as a sensor or actuator. Due to in-built non-linearity, the uncoupled model may not be](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-94-320.jpg)
![2.3. Coupled Constitutive Model 67
capable of handling certain applications such as (1) modelling passive damping circuits
in vibration control and (2) development of self-sensing actuators in structural health
monitoring. In these applications, the coupled equations require to be solved simultane-
ously. The solution of coupled equations simultaneously is a necessity for general-purpose
analysis of adaptive structures built in with magnetostrictive materials. In general, the
errors that result from using uncoupled models, as opposed to coupled ones, are problem
dependent. There are some cases where very large differences exist in situations, where
an uncoupled model is used over a coupled model [132].
In this work, the coupled case is analyzed with both linear and non-linear model. In
linear-coupled model, magneto-mechanical coefficient, elasticity matrix and permeability
matrix are assumed as constant. In nonlinear-coupled model, mechanical and magnetic
nonlinearity are decoupled in their respective domains. The nonlinear stress-strain re-
lationship is generally represented by modulus of elasticity and the nonlinear magnetic
flux-magnetic field relationship represented by permeability of the material. Magneto-
mechanical coupling coefficient will be assumed as constant in this case.
2.3.1 Linear Model
From Equation-(2.1) and Equation-(2.2), the 3D constitutive model for the magnetostric-
tive material can be written as
{σ} = [Q]{ } − [e]T {H} (2.9)
{B} = [e]{ } + [µ ]{H} (2.10)
Where [Q] is Elasticity matrix, which is the inverse of compliance matrix [S], [µ ] is the
permeability at constant strain. [µ ] and [e] are related to [Q] through
[e] = [d][Q] (2.11)
[µ ] = [µσ ] − [d][Q][d]T (2.12)
For ordinary magnetic materials, where magnetostrictive coupling coefficients are zero,
[µ ]=[µσ ], the permeability.
Consider a magnetostrictive rod element of length L, area A, with Young modulus
Q. If a tensile force F, is applied the rod develops a strain , and hence a stress σ. Total](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-95-320.jpg)

![2.3. Coupled Constitutive Model 69
IN µσ
e + Hµ = (2.21)
L
As right hand side of Equation-(2.21) is not function of and left hand side is magnetic
flux density (Equation-(2.10)), it can be concluded that the magnetic flux density in this
model is not function of . Hence, it is preserving the flux line continuity. Eliminating H
from Equation-(2.20) and substituting this in Equation-(2.21), stress - strain relationship
of the magnetostrictive material can be written as follows.
H = (Q − F/A)/e (2.22)
IN µσ Ae + Lµ F IN µσ eA + F µ L
= = (2.23)
ALe2 + ALµ Q ALµσ Q
From Equation-(2.23), total strain for applied coil current I and tensile stress F/A can
be written as
=λ+ σ (2.24)
where λ is the strain due to coil current, which is called the magnetostriction, and σ is
the strain due to tensile stress (elastic strain). These are given by
IN µσ Ae
λ= = IN d/L (2.25)
ALµσ Q
Lµ F F
σ = σQ
= (2.26)
ALµ AQ∗
Let Q∗ be the modified elastic modulus and substituting the value of e and µ from
Equation-(2.11) and Equation-(2.12), Q∗ will be
Qµσ Qµσ e2
Q∗ = = σ =Q+ (2.27)
µ µ − d2 Q µ
If the value of µσ is much greater than d2 Q, µ can be assumed equal to µσ and Q∗ can
be assumed as equal to Q. Hence, the total strain of the rod will be same as for the
uncoupled model. The first term in the strain expression is the strain due to magnetic
field, and the second term is the strain due to the applied mechanical loading. However,
for Terfenol-D [52], the value of d2 Q is comparable with µσ . Substituting the value of
strain from Equation-(2.23) in the Equation-(2.22), the value of magnetic field will be
F µ IN
H=− (1 − σ ) + (2.28)
Ae µ L](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-97-320.jpg)
![70 Chapter 2. Constitutive relationship of Magnetostrictive Materials
Note that although the magnetostriction value (IN d/L) in Equation-(2.25) is same for
coupled and uncoupled case, the value of magnetic field is different. Assuming r as the
ratio of two permeabilities or two elastic module, from Equation-(2.27), r can be written
as.
µσ Q∗
r= = (2.29)
µ Q
If the value of r is one, result of coupled analysis is similar with uncoupled analysis.
In Figure-2.20, the value of r is shown in contour plot for different values of constant
strain permeability and modulus of elasticity considering coupling coefficient as 15X10−9
m/Amp. In the Figure-2.20(a), value of r is shown for different values of permeability
and elastic modulus. In the Figure-2.20(b), value of r is shown for different values of
permeability and modified elasticity. In these plots it is clear that for a particular value
of elasticity, if the value of permeability increases, the value of r will decrease. However,
for a particular value of permeability, if the value of elasticity increases the value of r
will increase. In Figure-2.21, the value of r is shown in contour plot for different value
of permeabilities and coupling coefficient considering module of elasticity as 15GPa. In
Figure-2.21(a), value of r is given for different values of constant strain permeability and
coupling coefficient. In Figure-2.21(b), value of r is shown for different values of constant
stress permeability and coupling coefficients. In these plots it is clear that for a particular
value of permeability, if the value of coupling coefficient increases the value of r will
increase. But for a particular value of coupling coefficient if the value of permeability
increases, the value of r will decrease. In Figure-2.22, the value of r is shown in contour
plot for different value of elasticities and coupling coefficient considering constant strain
permeability as 7X10−6 henry/m. In Figure-2.22(a), value of r is given for different values
of modulus of elasticities and coupling coefficient. In Figure-2.22(b), value of r is shown
for different values of modified elasticities and coupling coefficients. In these plots it is
clear that for a particular value of elasticity, if the value of coupling coefficient increases
the value of r will increase. Similarly, for a particular value of coupling coefficient if the
value of elasticity increases, the value of r will increase.
From experimental data given in Etrema manual [52], the best value of Q, µσ and d
is calculated, which will minimize the difference between experimental data and the data
according to Equation-(2.23) by least square approach. In the first set of experimental
data, only magnetostriction value is reported, which is expressed in Equation-(2.25). The](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-98-320.jpg)






![2.3. Coupled Constitutive Model 77
Here E = Q ∗ is the elastic modulus for a magnetically stiffened rod and Q = E ∗ is for
magnetically flexible rod. Magnetically stiffened means that the magnetic flux B=0 inside
the rod as rod is wound by short circuited coils. Magnetically flexible means the rod is
free from any coil. E-Q relation can be obtained form Equation-(2.34).
To model the one-dimensional nonlinear magnetostrictive stress-strain and magnetic
field-magnetic flux relationships, Equation-(2.32) and Equation-(2.33) can be written as,
E( ) − f B = σ (2.48)
IN
−f + g(B) = (2.49)
L
where f is the real parameter of scalar value, and - E( ), B - g(B) are two real parameter
nonlinear curves. The basic advantage of this model is that only two nonlinear curves
are required for representing nonlinearity reported in different stress levels. As opposed
to this approach, in straight forward polynomial representation of magnetostriction [192],
one requires single nonlinear curve for every stress level. To get the coefficients of two
nonlinear curves and the value of real parameter f , experimental data from Etrema manual
[52] is used. From strain, applied coil current and stress level available in the manual, these
coefficients are evaluated. Considering modulus elasticity as 30GPa, and f as 75.3X106
m/Amp as an initial guess, the values of magnetic flux density, B are calculated from
Equation-(2.48). Similarly from Equation-(2.49), values of g(B) are evaluated. From
these B and g(B) values, curves of B − g(B) is computed. This curve is used to get
mechanical relationship. Here, the value of B is computed from B − g(B) relationship.
From this value of B, using Equation-(2.48), values of E( ) is calculated. From the
E( ) and values, the mechanical nonlinear curve of − E( ) relationship is computed. In
summary, first the magnetic nonlinear curve is evaluated from mechanical nonlinear curve
and mechanical nonlinear curve is evaluated from magnetic nonlinear curve with the help
of experimental data given in Etrema manual [52]. This iteration will continue till both
mechanical curve and magnetic curve converges. Thus, with the help of experimental
data given in Etrema manual [52] and Equations-(2.48) and (2.49), nonlinear mechanical
and magnetic relationship is evaluated. Initial values of modulus of elasticity and f are
computed on trial and error basis.
For sensor device, where coil current is assumed as zero, strain and the value of
magnetic flux due to the application of stress is given by
g(B)
= (2.50)
f](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-105-320.jpg)
![78 Chapter 2. Constitutive relationship of Magnetostrictive Materials
E( ) − σ
B= (2.51)
f
Nonlinear curves for magnetic and mechanical properties are shown in Figure-2.23. These
two nonlinear curves are represented as sixth order polynomial given in Equation-(2.52)
and Equation-(2.53). Coefficients of these polynomials curves are given in Table-2.4,
where unit of B is tesla, g(B) is Amp/m and E( ) is Pa. The value of magneto-mechanical
coupling parameter (f ) is 75.3X106 m/amp, which is reciprocal of 13.3X10−9 amp/m.
Table 2.4: Coefficients for sixth order polynomial.
c d a b
6 0 0 4.5419e+28 1.5853e-50
5 -2.1687e+06 -1.9526e-27 7.6602e+25 -6.1288e-44
4 1.5211e+06 1.1589e-21 -4.2662e+22 -1.0355e-34
3 3.5828e+05 -2.0047e-16 -6.6788e+19 -4.0508e-27
2 -2.1062e+05 2.0096e-12 2.3911e+16 1.0806e-19
1 2.2754e+05 4.7789e-06 1.2539e+13 2.7977e-11
0 -8.8129e+03 4.4239e-02 3.3893e+10 -1.9704e-05
g(B) = c5 ∗ B 5 + .. + c1 ∗ B + c0
B = d5 ∗ g(B)5 + .. + d1 ∗ g(B) + d0 (2.52)
6
E( ) = a6 ∗ + .. + a1 ∗ + a0
= b6 ∗ E( )6 + .. + b1 ∗ E( ) + b0 (2.53)
On the basis of these two curves given in Equation-(2.52) and Equation-(2.53) and
parameter (f ), strain, magnetostriction vs. applied magnetic field for different stress level
are plotted in Figure-2.24. The experimental data of strain-magnetic field relationships
for different stress level is almost matching with this model. Similarly strain-compressive
force and elastic modulus for different magnetic field level is plotted in Figure-2.25. Elastic
modulus initially decreases and then increases for each magnetic field level, which is also
reported in [52].
Computation of Flux and Strain from Coil Current and Stress: As two nonlinear
curves are related in these relationships, the calculation of magnetic flux and strain from
stress and coil current is an iterative procedure. Initially, the value of magnetic flux, B
is assumed a certain value. From B − g(B) curve, the value of g(B) is evaluated. From](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-106-320.jpg)
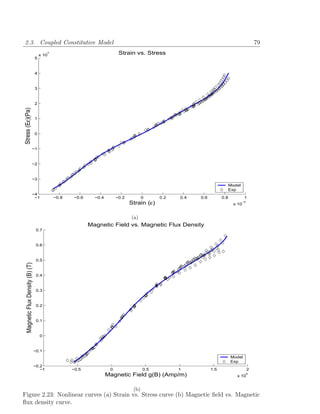







![Chapter 3
FEM with Magnetostrictive
Actuators and Sensors
3.1 Introduction
In the last chapter, various material models (linear, nonlinear, coupled and uncoupled)
were formulated and the range of its applicability were discussed. In this chapter, these
will be incorporated in the conventional 3-D Finite Element (FE) formulation. From the
3-D FE models, 1-D and 2-D models will be deduced and the effect of different material
models on the healthy and damaged 1-D and 2-D laminated composite structures will be
investigated. In particular, the impact of different material models on the SHM studies
will be highlighted.
3.1.1 Existing Literature
There is a very few literature available on the FE formulation for composite structure
with embedded magnetostrictive patches. Kannan and Dasgupta [174] developed quasi-
static Galerkin finite-element theory for modelling magneto-mechanical interactions at
the macroscopic level considering body forces and coupled constitutive nonlinearities.
Benbouzid et al. modelled the static [35] and dynamic [37] behavior of the nonlinear
magneto-elastic medium for magneto-static case using finite element method. Magneto-
mechanical coupling was incorporated considering both permeability and elastic modulus
as functions of stress and magnetic field. In reference [38], finite elements were used for
modelling different magnetic circuits with leakage flux of a basic actuator configuration.
However, none has provided a convenient way for analysis of magnetostrictive smart
structure considering coupled magneto-mechanical features.
87](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-115-320.jpg)
![88 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
In this chapter, a new finite element formulation for structures with in-built mag-
netostrictive patches that can handle coupled analysis is presented. Here, both magnetic
and mechanical degrees are considered as unknown degrees of freedom. In the present
approach, smart patches are introduced in the laminates to induce actuation strains on
the application of magnetic field. This changes the state of stress in the sensing patch
and hence the magnetic flux density through enclosed magnetic coil changes, resulting in
a voltage across the sensing coil.
Next these elements are used for structural health monitoring applications and
shown that sensitivity of damage in open circuit voltages for SHM is comparable with
the error induced due to uncoupled assumption in the finite element analysis. Finally
this chapter concludes that for the SHM application with magnetostrictive sensor and
actuator, coupled analysis is required for true estimation of the response of the structure.
This chapter is organized as follows. First the variational formulation is given to
obtain the mass, stiffness and coupling stiffness of the system. The main aim of the
study is to bring out the effect of magneto-mechanical coupling on the overall response
of laminated composite structure. For this purpose numerical study is performed on
composite structures containing two patches, one acting as an actuator and the other as
a sensor for varying current amplitude and ply sequence. Both static, frequency response
and time response analysis are performed to bring out the essential difference in responses
between coupled and uncoupled models. The chapter is then concluded with a brief
summary.
3.2 3D Finite Element Formulation
Finite element formulation begins by writing the associated energy in terms of nodal
degrees of freedom by assuming the displacement and magnetic field variation over each
element. That is, the displacement field {U } can be written as
{U } = {u v w}T (3.1)
where u(x, y, z, t), v(x, y, z, t) and w(x, y, z, t) are the displacement component in x, y and
z direction respectively. These displacements are obtained from element nodal displace-
ments {U e (t)}, through the element shape function, [NU (x, y, z)] as
{U } = [NU ]{U e } (3.2)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-116-320.jpg)
![3.2. 3D Finite Element Formulation 89
The strains { } in terms of displacements {U }, are obtained as
{ }={ xx yy zz γyz γxz γxy }T = [L]{U } (3.3)
Where [L] is given by
∂
∂x
0 0
0 ∂
0
∂y
0 0 ∂
∂z
[L] = ∂ ∂ (3.4)
0 ∂z ∂y
∂ ∂
∂z 0 ∂x
∂ ∂
∂y ∂x
0
Using Equation-(3.2) in Equation-(3.3), the strains can be written as
¯
{ } = [B]{U e } (3.5)
¯
where [B] is strain-displacement matrix and can be expressed as
¯
[B] = [L][NU ]. (3.6)
Similarly Magnetic field vector in the three coordinate directions {H} can be written as
{H} = {Hx Hy Hz }T (3.7)
These magnetic fields are obtained from element nodal magnetic fields {H e }, through the
shape function, [NH (x, y, z)] as
{H} = [NH ]{H e } (3.8)
Strain Energy in magnetostrictive material over a volume v is given by,
1
Ve = { }T {σ}dv
2 v
Substituting for {σ} from Equation-(2.9), { } from Equation-(3.5) and {H} from Equation-
(3.8), this can be written as
1
Ve = { }T {[Q]{ } − [e]T {H}}dv
2 v
1 1
= { }T [Q]{ }dv − { }T [e]T {H}dv
2 v 2 v
1 e T 1
= {U } [KU U ] {U e } − {U e }T [KU H ] {H e } (3.9)
2 2](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-117-320.jpg)
![90 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
where
¯T ¯ ¯ T
[KU U ] = [B] [Q][B]dv, [KU H ] = [B] [e]T [NH ]dv. (3.10)
v v
Where [KU U ] is the stiffness matrix associated with mechanical degrees of freedom and
[KU H ] is the coupling stiffness matrix that couples the mechanical and magnetic degrees
of freedoms. Kinetic Energy in magnetostrictive material is
1 ˙ T
˙
Te = {U } [ρ]{U }dv (3.11)
2 v
˙
where {U } is velocity vector, ρ is density of the material. Substituting {U } from Equation-
(3.2), the kinetic energy can be written as
1 ˙ ˙
Te = {[NU ]{U e }}T [ρ][NU ]{U e }dv
2 v
1 ˙e T ˙ 1 ˙ T ˙
= {U } [NU ]T [ρ][NU ]dv{U e } = {U e } [MU U ] {U e } (3.12)
2 v 2
where the mass matrix for mechanical degrees of freedom can be written as
[MU U ] = [NU ]T [ρ][NU ]dv (3.13)
v
Magnetic Potential Energy in magnetostrictive material is given by
1
Vm = {B}T {H}dv (3.14)
2 v
Substituting {B} from Equation-(2.10), { } from Equation-(3.5) and {H} from Equation-
(3.8), magnetic potential energy can be written as,
1
Vm = {[e]{ } + [µ ]{H}}T {H}dv
2 v
1 e T 1
= {U } [KU H ]{H e } + {H e }T [KHH ]{H e } (3.15)
2 2
where [KHH ] is stiffness matrix of magnetic degrees of freedom, which can be expressed
as
[KHH ] = [NH ]T [µ ]T [NH ]dv. (3.16)
v
Magnetic External Workdone for N turn coil with coil current I, is given by
Wm = IN {[µσ ]{H}} . dA
A
(3.17)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-118-320.jpg)
![3.2. 3D Finite Element Formulation 91
If n is the coil tern per unit length, A is the cross sectional area of the magnetostrictive
patch and {lc } is the direction cosine vector of coil axis, the above expression can be
written as
Wm = In{lc }T [µσ ]{H}dv
v
= {FH }T {H e } (3.18)
where {FH } is given by
{FH } = In{lc }T [µσ ][NH ]dv (3.19)
v
Mechanical External Workdone is
We = {b}T {U }dv + {τ }T {U }dS
v S
T e
= {R} {U } (3.20)
where {b} is body force vector. and {τ } is surface force vector acting on an area S. {R}T
is equivalent nodal load for external mechanical forces of the magnetostrictive material.
t2
Applying the Hamilton’s Principle ∂( t1
(Te − Ve + Vm + Wm + We )dt) = 0, we can
the governing FE equation. This takes a varied form for uncoupled and coupled model.
These are given below.
3.2.1 Uncoupled Model
In uncoupled model magnetic field, H is considered independent of mechanical condition
[216], and is a function of coil current I, which is given by
H = kc I (3.21)
Where kc is coil constant. Hence, in uncoupled model only mechanical degrees of freedom,
{U e } are unknowns. Substituting this in the Hamiltonian’s Equation, the governing
differential equation becomes
¨
[MU U ]{U e } + [KU U ]{U e } = [KU H ]{H e } − {R} (3.22)
Where He is calculated using Equation-(3.21).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-119-320.jpg)
![92 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
3.2.2 Coupled Model
Unlike uncoupled model, in the coupled model, the mechanical and magnetic degrees
of freedom are considered as unknown. Hence, Hamiltonian’s principle gives following
Equations.
MU U 0 ¨
Ue KU U −KU H Ue −R
¨ + = (3.23)
0 0 He KHU KHH He FH
Note that the generalized stiffness matrix is not a symmetric matrix. Both the equations,
sensing and actuation are coupled through the off-diagonal, sub-matrix of the stiffness
matrix. Expanding Equation-(3.23), we get
¨
[MU U ]{U e } + [KU U ]{U e } − [KU H ]{H e } = −R (3.24)
and
[KU H ]T {U e } + [KHH ]{H e } = {FH }T
or {H e } = [KHH ]−1 {{FH }T − [KU H ]T {U e }} (3.25)
Substituting {H e } from Equation-(3.25) in Equation-(3.24) we get
¨
[MU U ]{U e } + [KU U ]{U e } = {F } (3.26)
where
[KU U ] = [[KU U ] + [KU H ][KHH ]−1 [KU H ]T ]
{F } = [KU H ][KHH ]−1 {FH } − {R} (3.27)
3.3 Computation of Sensor Open Circuit Voltage
After the computation of nodal displacement and velocities, we can compute the sensor
open circuit voltage. This is particularly of great interest in structural health monitoring
studies. In this section, we derive the necessary expression for both coupled and uncoupled
models.
If the sensor coil current is considered as zero, after determining the mechanical and
magnetic degrees of freedom, sensor open circuit voltage can be post processed in both
uncoupled and coupled model. Using Faraday’s law, open circuit voltage V in the sensing
coil can be calculated from magnetic flux passing through the sensing patch.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-120-320.jpg)
![3.3. Computation of Sensor Open Circuit Voltage 93
3.3.1 Uncoupled Model
In the uncoupled model, the nodal magnetic field is zero as per Equation-(3.21) with
zero sensor coil current. To get the open circuit voltage, magnetic flux density can be
expressed in terms of strain from the sensing equation, (Equation-(2.10)) as
¯
{B} = [d]{σ} = [d][Q]{ } = [e]{ } = [e][B]{U e } (3.28)
Now using Faraday’s law, open circuit voltage of the sensor can be calculated as
∂
V = −Ns [d]{σ} . dA (3.29)
A ∂t
This can be converted to volume integration as before and the expression for voltage
become
∂ ˙
V = −ns {lc }T [e]{ }dv = {Fv }T {U e } (3.30)
∂t v
where {Fv }T for uncoupled model becomes
{Fv }T = −ns {lc }T ¯
[e][B]dv (3.31)
v
3.3.2 Coupled Model
Magnetic flux density is computed from nodal magnetic field, which is obtained from
finite element analysis. Thus open circuit voltage in the sensor can be calculated from
the expression
∂ σ
V = −Ns − {µ H} . dA (3.32)
A ∂t
where Ns is the total coil turn of the sensing patch. Dividing by the length of the patch
and pre-multiplying with the direction cosine vector of coil axis, the above area integration
with dot product is converted to volume integration. Substituting {H} from Equation-
(3.8), the open circuit voltage can be written as
∂ σ
V = ns {lc }T {µ H}dv
v ∂t
∂
= ns {lc }T {µσ H}dv (3.33)
∂t v](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-121-320.jpg)
![94 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
Substituting {He } from Equation-(3.25) in the above equation it can be written as
∂
V = −ns {lc }T {µσ [NH ]}dv [KHH ]−1 [KU H ]T {U e }
v ∂t
˙
= {Fv } {U e }
T
(3.34)
where {Fv }T is
{Fv }T = −ns {lc }T {µσ [NH ]}dv [KHH ]−1 [KU H ]T . (3.35)
v
3.4 Numerical Experiments
The goal of the analysis is to bring out the effect of coupling on the overall response of 1-D
and 2-D composite structures. Hence, for most of the analysis, the results are compared
with the uncoupled model to see the effect of coupling. Here we consider four examples
of one and two dimensional structures. The first is 1-D magnetostrictive rod model, the
second is a composite beam model based on first order shear deformation theory. The
third and fourth examples considered plate elements and 2D plane stress/strain elements,
respectively. Figure-3.1 shows the various finite elements, with nodes and degrees of
freedom. For these examples, static, frequency response and time history analysis are
performed to bring out the importance of coupled analysis in the context of structural
health monitoring.
3.4.1 Axial Deformation in a Magnetostrictive Rod
To demonstrate the effect of coupling, the above 3-D Equations-(3.24,3.25) reduced to
simple 1-D model with mechanical displacement field (u, v, w) as
u(x, y, z, t) = u(x); v = 0; w=0 (3.36)
and magnetic field H can be reduced as
Hx (x, y, z, t) = H(x); Hy (x, y, z, t) = 0; Hz (x, y, z, t) = 0. (3.37)
Here, a magnetostrictive rod of length L, cross sectional area A, modulus of Elasticity E,
magneto-mechanical strain coefficient d and constant stress permeability µσ is considered.
For finite element formulation, we use the conventional interpolation function that is,](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-122-320.jpg)
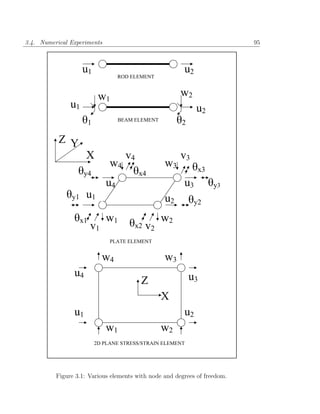
![96 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
u(x) = a0 + a1 x, which gives two shape functions as N1 = [1 − x/L] and N2 = [x/L].
Hence, the displacement field can be written as
u(x) = N1 (x)u1 + N2 (x)u2 H(x) = N1 (x)H1 + N2 (x)H2 (3.38)
Where u1 , u2 are the element nodal displacement and H1 , H2 are nodal magnetic fields.
Hence, both mechanical and magnetic shape function can be written in matrix form as
x x
[NU ] = [NH ] = 1 − (3.39)
L L
Using Equation-(3.5), the strain-displacement matrix can be written as
¯ 1 1
B= − (3.40)
L L
where strain = ∂u . Using Equations-(3.13) and (3.10), the mass matrix [MU U ], the
∂x
stiffness matrix [KU U ] and coupling matrix [KU H ], can be calculated as
ALρ 2 1
[MU U ] = ,
6 1 2
AE 1 −1
[KU U ] = , (3.41)
L −1 1
AdE −1 −1
[KU H ] = .
2 1 1
The matrix [KHH ] can be calculated from Equation-(3.16) as
ALµ 2 1
[KHH ] = (3.42)
6 1 2
The force vector {FH } can be calculated from Equation-(3.19) as
Iµσ ALn 1
{FH } = (3.43)
2 1
Now, using these matrices, we can perform both coupled and uncoupled static analysis.
3.4.1.1 Uncoupled Analysis
For static uncoupled analysis, the corresponding equations become
AE 1 −1 u1 AdE −1 −1 H1 R1
− = (3.44)
L −1 1 u2 2 1 1 H2 R2
Where u1 & u2 are the two nodal axial displacements in a magnetostrictive rod. H1 =
H2 = nI as per Equation-(3.21) considering kc = n. Here, we considered three cases for
uncoupled analysis](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-124-320.jpg)

![98 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
µσ
increase (decrease) in the ratio of µ
. Similarly the blocked force in the support is
obtained from Equation-(3.48) and is given by
µσ
R1 = −R2 = AdEH1 = AdEIn (3.51)
µ
which is more than the value generally considered (AdEIn). This also depends on
the ratio of permeabilities.
2) For mechanically free boundary condition, where R1 = R2 = 0 (u1 = 0 to remove
rigid body displacement), the Equations (3.48-3.49) are solved to obtain.
H1 = H2 = H = In u2 = LdnI = dnI (3.52)
That is H = In is only true for a free-free boundary conditions. For the other
boundary conditions, the magnitude of magnetic field depends on the ratio of per-
meabilities. Stress σ = E u2 − EdH = 0 which satisfies equilibrium equation of free
L
rod at mechanically free boundary condition.
3) For a sensor with tensile force F and zero coil current (I = 0), where −R1 = R2 = F
(u1 = 0 to remove rigid body displacement).
Fd F Lµ
H1 = H2 = − σ
u2 =
Aµ AEµσ
B = e + µσ H = 0 ⇒ e = −Hµσ (3.53)
Hence again the dependence on the ratio of permeabilities is very important. Stress
F
σ = E − eH = A
which satisfies equilibrium equation.
Hence, It is clear that due to coupling, magnetic field and hence blocked force of a me-
chanically fixed rod is less than the value generally considered in uncoupled model. The
ratio between these two values is calculated for Terfenol-D rod taking data from Terfenol-
D manual [52]. Considering d = 15E − 9 m/amp, E = 30 GPa and constant stress
µσ
relative permeability equal to 10, µ
= 0.46, which is around 50% of the value generally
considered. However, for any other material, if µ d2 E, then µσ ≈µ and uncoupled
and coupled model will give similar result. But for giant magnetostrictive materials like
Terfenol-D, the effect of coupling stiffness matrix is considerable on the axial response.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-126-320.jpg)


![3.4. Numerical Experiments 101
0
Hxp is X directional magnetic field at mid plane of the magnetostrictive patch p. The mag-
netic field along the thickness direction within a particular layer is assumed as constant.
In matrix notation, Equation-(3.54) can be written as
u 1 0 −z u0
{U } = v = 0 0 0 w0 ¯
= [Np ]{U } (3.56)
0
w 0 1 0 θ
For finite element formulation, displacement and magnetic fields are discretized as
u0 (x) = N1 (x)u1 + N2 (x)u2 w0 (x) = N1 (x)w1 + N2 (x)w2
θ0 (x) = N1 (x)θ1 + N2 (x)θ2 H(x) = N1 (x)H1 + N2 (x)H2 (3.57)
That is each node has four degrees of freedom. Here u1 , u2 , w1 , w2 , θ1 , θ2 are the element
nodal displacements and slopes and H1 , H2 are nodal magnetic fields. Equation-(3.57)
can be written in matrix form as
¯ ¯
{U } = [NU ]{U e } {H} = [NH ]{H e }. (3.58)
Here, nodal mechanical displacement vector, {U e } and magnetic field vector {H e } are
given by
{U e } = {u1 w1 θ1 u2 w2 θ2 }T , {H e } = {H1 H2 }T . (3.59)
The mechanical and magnetic shape functions can be written as
N1 0 0 N2 0 0
¯
[NU ] = 0 N1 0 0 N2 0 , [NH ] = N1 N2 (3.60)
0 0 N1 0 0 N2
where linear shape functions are assumed, which are given by
x x
[N1 ] = 1 − , [N2 ] = (3.61)
L L
To formulate mechanical shape function, mechanical displacement {U } can be written
using Equation-(3.56) as
¯
{U } = [Np ][NU ]{U e } = [NU ]{U e } (3.62)
where mechanical shape function [NU ] is
N1 0 −zN1 N2 0 −zN2
[NU ] = 0 0 0 0 0 0 (3.63)
0 N1 0 0 N2 0](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-129-320.jpg)
![102 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
¯
The strain displacement matrix [B] can be written from Equation-(3.5) as follows
N1,x 0 −zN1,x N2,x 0 −zN2,x
0 0 0 0 0 0
0 0 0 0 0 0
¯
[B] = [L][NU ] = (3.64)
0 0 0 0 0 0
0 N1,x −N1 0 N2,x −N2
0 0 0 0 0 0
The stiffness matrix [KU U ] can be calculated from Equation-(3.10). To avoid shear locking,
shear part of the [KU U ] matrix is reduced integrated. Values of nonzero elements of
stiffness matrix [KU U ] of a composite laminated beam are the following
A11 A15 A15 B11 A11
K11 = , K12 = , K13 = − , K14 = − ,
L L 2 L L
A15 A15 B11 A55 A55 B15
K15 = − , K16 = + , K22 = , K23 = − ,
L 2 L L 2 L
A15 A55 A55 B15
K24 = − , K25 = − , K26 = + ,
L L 2 L
A55 L D11 A15 B11
K33 = − B15 + , K34 = − + ,
4 L 2 L
A55 B15 A55 L D11 A11 A15
K35 = − + , K36 = − , K44 = , K45 = ,
2 L 4 L L L
A15 B11 A55
K46 = − − , K55 = ,
2 L L
A55 B15 A55 L D11
K56 = − − , K66 = + B15 + ,
2 L 4 L
Kij = Kji [ i, j = 1 to 6].
where Aij , Bij , Dij are
[Aij Bij Dij ] = ¯
Qij [1 z z 2 ]dA (3.65)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-130-320.jpg)
![3.4. Numerical Experiments 103
The mass matrix [MU U ] can be calculated from Equation-(3.13) and is given by
2I0 0 −2I1 I0 0 −I1
0 2I0 0 0 I0 0
L −2I0 0 2I2 −I1 0 I2
[MU U ] = . (3.66)
6 I0
0 −I1 2I0 0 −2I1
0 I0 0 0 2I0 0
−I1 0 I2 −2I1 0 2I2
where I0 , I1 , I2 are the mass, first moment of mass and second moment of mass per unit
length of the beam and are given by
[I0 I1 I2 ] = ρ[1 z z 2 ]dA (3.67)
A
The matrix [e] in Equations-(2.9) & (2.10) for beam element takes the form as
[e] = e11 0 0 0 0 0 (3.68)
since the magneto-mechanical stress will be experienced only in the axial direction due to
beam bending. The matrix [KU H ] can be calculated from Equation-(3.10) as
T 1 −e0 0 e1 e0 0 −e1
11 11 11 11
[KU H ] = (3.69)
2 −e0 0 e1 e0 0 −e1
11 11 11 11
Where e0 and e1 are given by
11 11
e0
11 e1 =
11 e11 [1 z] dA (3.70)
A
The matrix [KHH ] can be calculated from Equation-(3.16) as
Lµ0 2 1
[KHH ] = (3.71)
6 1 2
Where µ0 is
[µ0 ] = µ dA (3.72)
A
{FH } and {Fv } from Equations-(3.19), (3.31) and (3.35) can be written as
Inµ0 L
{FH }T = 1 1 ,
2
{Fv }T noupled = n
U e0 0 −e1
11 11 −e0 0 e1
11 11 ,
{Fv }T 0r 1r 0r 1r
Coupled = n e11 0 −e11 −e11 0 e11 . (3.73)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-131-320.jpg)
![104 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
Where e0r and e1r are given
11 11
µσ
e0r
11 e1r
11 = e11 [1 z] dA (3.74)
A µ
3.4.2.1 Composite Beam with Magnetostrictive Bimorph
Numerical simulation is carried out by considering a laminated composite beam of total
thickness 1.8mm as shown in Figure-3.4. Length and width of the beam is 500mm and
50mm respectively. The beam is made of 12 layers with thickness of each layer being
0.15 mm. Surface mounted magnetostrictive patches at the top and bottom layer are
considered as sensor and actuator, respectively. Elastic modulus of composite is assumed
Z
¡
¡ ACTUATOR
¡
¡
¡
MAGNETOSTRICTIVE PATCHES
¡
¡
X
Y
¡
¡
¡
¡
SENSOR
Figure 3.4: Laminated Beam With Magnetostrictive Patches.
as 181 GPa and 10.3 GPa, in the parallel (E1 ) and the perpendicular (E2 ) direction of
fiber. Poisson’s ratio (ν), density (ρ) and shear modulus (G12 ) of composite are assumed
as 0.0, 1.6 gm/c.c. and 28 GPa, respectively. Elastic modulus (Em ), poisson’s ratio
(νm ), shear modulus (Gm ) and density (ρm ) of the magnetostrictive material are taken
as 30 GPa, 0.0, 23 GPa and 9.25 gm/c.c. respectively. Magneto-mechanical coupling
coefficient is taken as 15E-09 m/amp. Permeability at vacuum or air is assumed to be
400 π nano-Henry/m. Constant stress relative permeability of magnetostrictive material
is considered as 10. Number of coil turn per meter (n) in sensor and actuator is assumed
to be 20000. Three different analyses, namely the static, the frequency response and the
time history analysis are performed to bring out the essential difference in the responses
between coupled and uncoupled models.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-132-320.jpg)
![3.4. Numerical Experiments 105
3.4.2.2 Static Analysis
Table 3.1: Vertical Displacement of Cantilever Tip
Ply Coupled Uncoupled Ratio
Sequence wc mm wu mm wu /wc
m/[0]10 /m 2.17 2.44 1.12
m/[30]10 /m 2.83 3.30 1.17
m/[45]10 /m 3.84 4.78 1.24
m/[60]10 /m 5.52 7.69 1.39
m/[90]10 /m 8.62 15.40 1.78
m/[0/90]5 /m 3.44 4.80 1.40
m/[90/0]5 /m 7.26 10.73 1.48
[m]2 /[0]8 /[m]2 5.25 6.97 1.33
[m]2 /[30]8 /[m]2 6.03 8.41 1.39
[m]2 /[45]8 /[m]2 7.07 10.58 1.50
[m]2 /[60]8 /[m]2 8.53 14.22 1.68
[m]2 /[90]8 /[m]2 10.72 21.56 2.01
[m]2 /[0]4 /[90]4 /[m]2 6.23 10.34 1.66
[m]2 /[90]4 /[0]4 /[m]2 10.77 19.57 1.82
[m]3 /[0]6 /[m]3 8.88 14.39 1.62
[m]3 /[30]6 /[m]3 9.20 15.00 1.63
[m]3 /[45]6 /[m]3 9.62 16.50 1.72
[m]3 /[60]6 /[m]3 10.56 19.40 1.84
[m]3 /[90]6 /[m]3 12.15 25.53 2.10
[m]3 /[0]3 /[90]3 /[m]3 9.00 16.60 1.84
[m]3 /[90]3 /[0]3 /[m]3 12.88 26.31 2.04
[m]4 /[0]4 /[m]4 12.08 23.41 1.93
[m]4 /[30]4 /[m]4 11.48 21.24 1.85
[m]4 /[45]4 /[m]4 11.45 21.15 1.85
[m]4 /[60]4 /[m]4 12.00 23.10 1.93
[m]4 /[90]4 /[m]4 13.3 28.47 2.14
[m]4 /[0]2 /[90]2 /[m]4 11.62 23.10 1.99
[m]4 /[90]2 /[0]2 /[m]4 14.06 30.44 2.17
The effect of coupling of magnetostrictive material in a laminated composite beam
for static actuation is analyzed for 1 Amp DC actuation coil current. It is observed that
tip deflection for coupled analysis is 2.17mm, where as for uncoupled analysis, it is found
to be 2.44mm. The ratio between these two is 1.12. As the thickness of the actuator is
less compared to the thickness of the composite beam, the effective increase of stiffness
in the global stiffness matrix due to coupling is very less. Increase of thickness of sensor](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-133-320.jpg)



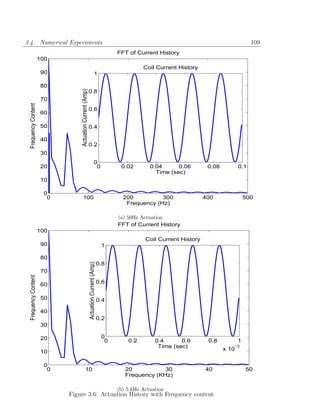



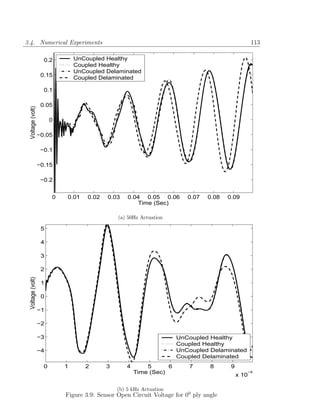

![3.4. Numerical Experiments 115
respectively. Magnetic fields in three coordinate directions are assumed as
0 0
Hx (x, y, z, t) = Hxp (x, y, t), Hy (x, y, z, t) = Hyp (x, y, t), Hz (x, y, z, t) = 0. (3.77)
0 0
Hxp and Hyp are X and Y directional magnetic field at mid plane of the magnetostrictive
patch p respectively. Hence, the magnetic field along the thickness direction within a
particular layer is assumed as constant. In matrix notation, Equation-(3.76) can be
written as
0
u0
u 1 0 0 −z 0 v
{U } = v = 0 1 0 0 −z w 0 ¯
= [Np ]{U } (3.78)
0
θx
w 0 0 1 0 0
0
θy
Stiffness and mass matrices of plate element are derived using bilinear shape functions
with standard 4 noded finite element formulation. Here each node of the element has
seven degrees of freedoms (five mechanical and two magnetic degrees of freedom).
Delamination for plate in finite element modelling is performed similar to the beam
as discussed in previous section. For single delamination, delaminated zone is modelled
with two sets of elements, one for top sub-laminate and other for bottom sub-laminate of
the plate. Two sets of nodes are also generated, where only one set is connected with the
elements for top sub-laminate and other set is connected with the elements for bottom
sub-laminate. Physical location of these nodes are in the neutral plane of the plate,
which may differ from the mid plane of these individual sub-laminates. Undelaminated
zone is modelled with single set of elements and nodes. These nodes are in the neutral
plane of the plate. Interface of the delaminated and undelaminated zone is modelled
with merging the nodes, which are physically in the same place. However, two nodes for
two sub-laminates and one node for undelaminated laminate are merged in the interface
of the delamination for the integrity of the model. For multiple delaminations, similar
approach is taken for every delamination one by one in the model. However, where the
delaminations are overlapped, more number of sub-laminates are required. Every sub-
laminate is modelled with plate elements, where stiffness and mass matrices for these
elements are calculated according to their location and thickness with respect to the
neutral plane of the plate. For each sub-laminate, a set of nodes are generated according
to the size of the delaminations, which are connected only with the elements for the
respective sub-laminate. At the periphery of the each delamination, respective nodes](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-143-320.jpg)


![118 Chapter 3. FEM with Magnetostrictive Actuators and Sensors
width direction are assumed equal to zero. Stiffness and mass matrices for 2D plane
strain element are derived using 4 noded bilinear shape functions with standard finite
element formulation. Here each node of the element has four degrees of freedoms (two
mechanical and two magnetic degrees of freedom).
3.4.4.1 Composite Beam with Different Types of Failure
Numerical simulation is carried out by considering a laminated cantilever composite beam
of total thickness 20mm as shown in Figure-3.13. Length and width of the beam is 250mm
and 50mm respectively. The beam is made of 4 layers ([0/45/ − 45/90]) with thickness of
each layer being 5 mm. Surface mounted magnetostrictive patches at the top and bottom
layer are considered as sensor and actuator, respectively. 50mm X 50mm X 5mm size
sensor and actuator are placed near the support and 150mm apart from the support of
the cantilever, respectively. Beam is modelled with 250 X 20 numbers of 4 noded plane
strain elements with each size of 1 mm X1 mm. Thickness of the crack in FE modelling is
assumed as 1 mm. Figure-3.13(a) shows the 5mm matrix cracking at 100 mm apart form
the support. Matrix cracking in FE formulation is modelled by removing elements (5
numbers) from the location of the crack in the layer of 900 ply angle. Actuator is excited
with 5kHz actuation. Figure-3.14 shows the open circuit voltages for this matrix cracking.
Effect of matrix cracking is less sensitive than the error due to uncoupled material analysis.
The stiffness loss at 900 layer is less compared to the 00 layer. Figure-3.13(b) shows the
5mm fiber breakage at 100mm apart form the support. Fiber breakage in FE formulation
is modelled by removing elements (5 numbers) from the location of the crack in the layer
of 00 ply angle. Figure-3.15 shows the open circuit voltages for this fiber breakage. Effect
of fiber breakage is more sensitive than the error due to uncoupled material analysis.
The stiffness loss at 00 layer is more compared to 900 layer in this case. Open circuit
voltages are more for damaged structure than undamaged structure for both coupled and
uncoupled formulation. Figure-3.13(c) shows the 10mm center crack at 100mm apart
form the support. Center crack in FE formulation is modelled by removing elements (10
numbers) from the location of the crack. Figure-3.16 shows the open circuit voltages for
this internal crack. In this case, the figure shows that the effect of damage and coupled
formulation are comparable.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-146-320.jpg)
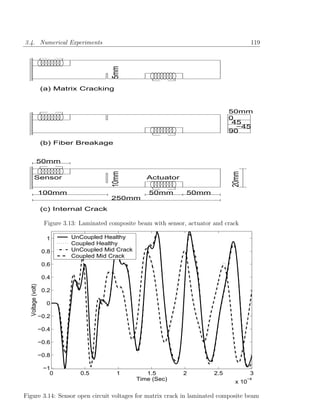


![Chapter 4
Superconvergent Beam Element with
Magnetostrictive Patches
4.1 Introduction
In the last chapter, a series of Finite Element (FE) formulation were performed and these
were applied to solve some health monitoring problems involving different flaws such as
material degradation, delamination, fiber breakages, matrix cracking etc. In most cases,
substantial flaw sizes were considered to induce a voltage change in the sensing coil.
However, if the flaw size is very small, then one would require signal with high frequency
content. From FE point of view, such a signal will enormously increase the problem sizes
due to the requirement that the element size be comparable to the wavelength, which are
very small at high frequencies. This problem can be alleviated to a certain level by using,
what is known as super-convergent FE formulation.
One of the fundamental problems encountered in FE formulation is choice of appro-
priate polynomials of the field variable. For example, for obtaining accurate responses for
the field variable (transverse displacement) in elementary beam, one needs a cubic poly-
nomial, and the formulated element using such polynomial is a C 1 continuous element
as it has to satisfy both displacement and slope continuity. On the other hand, for the
same beam, if shear deformation is considered, this slope is independently interpolated
along with transverse displacement and both these field variables require only linear poly-
nomials. In other words, the formulation is C 0 continuous. If such an element is used
in this beam situation, where the shear strains are negligible, the element’s response will
be many orders smaller than the true response. This phenomenon is called the ”Shear
locking problem” and so far is dealt in many references [313, 314, 427, 325, 32, 123, 347].
Normally one under-integrates the energy terms associated with the shear stress/strain
122](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-150-320.jpg)
![4.1. Introduction 123
[313] to remove the locking. Alternatively, one can use the superconvergent solution to
the governing equation as interpolating function for element formulation. This completely
removes locking and some of the constants of the interpolating functions become mate-
rial/sectional properties dependent. In this approach, the static part of the governing
equation is exactly solved and used as interpolating function for element formulation.
Hence, the approach gives exact static stiffness for point loads. Some of the constants
in the interpolating function, when evaluated in term of nodal displacements, become
dependent on material/sectional properties of the beam.
4.1.1 Existing Literature
Such approaches were adopted to develop elements for Herman-Mindlin rod [139], first-
order shear deformable composite beam [62], first- and higher-order shear deformable
isotropic beam [181, 325] and beam with Poisson’s contraction [64]. Chakraborty et al.
[63] developed such an element for functionally graded beam based on first order shear
theory. Mitra et al. [268] developed super convergent element of arbitrary cross-section
for composite thin wall beam with open or closed contour. Superconvergent solution
for bending of isotropic beam based on higher order shear deformable theory (HSDT)
was reported by Eisenberger [114]. Similar solutions for the bending of thin and thick
cross-ply laminated beams were presented by Khedir and Reddy [180, 181] using the state
space concept. Murthy et al. [283] developed a refined higher order finite element for
asymmetric composite beams.
In this chapter, the super-convergent FE approach is used to derive two different
beam elements with embedded magnetostrictive patches, one for Euler-Bernoulli beam
and the other for a shear deformable beam. As a result, in most cases, only a single
element is adequate to capture the static behavior irrespective of boundary conditions
and ply-stacking configuration. As seen in the previous works, the coefficients associated
with the interpolating polynomial are expected to be dependent on the material properties
and the ply-stacking sequence. Finally these super-convergent elements will be used for
material property identification using an Artificial Neural Network (ANN) model, where a
number of finite element simulation is essential with different values of material properties
to generate a mapping relation between structural response and material properties. These
finite element simulations can be performed using very few formulated super-convergent
elements, which can simultaneously reduce the computational time. Again, here, the
elements will be formulated for both uncoupled and coupled material models and their](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-151-320.jpg)


![126 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
where N is the axial force, M is the moment and V is the shear force. The cross sectional
properties Aij , Bij , Dij , Ae , Bijp , I0 , I1 , I2 , Aµp and Aσ are given by
ijp
e
µp
[Aij Bij Dij ] = ¯
Qij [1 z z 2 ]dA, (4.9)
A
ijp
e
[Ae Bijp ] = eij [1 z]dA, (4.10)
p
[I0 I1 I2 ] = ρ[1 z z 2 ]dA, (4.11)
A
[Aµp Aσ ] =
µp [µ µσ ]dA. (4.12)
p
In the above expression, the integration over p means that this operation is performed
only to pth magnetostrictive layer. The cross-sectional thermal stiffness is given by
Aα α
Bij = ¯
αQij [1 z] dA. (4.13)
ij
4.2.1.1 Uncoupled Formulation
For finite element beam formulation based on uncoupled constitutive model, we have
Hxp = H = nI, ∂Hxp /∂x = 0. Hence, the governing equations and the associated bound-
ary conditions become
δu◦ : ¨ ¨◦
I0 u◦ − I1 w,x + A11 u◦ − B11 w,xxx = 0,
,xx
◦
δw◦ : ¨
I0 w◦ + B11 u◦ − D11 w,xxxx = 0,
,xxx
◦
(4.14)
and
N = −A11 u◦ + B11 w,xx +
,x
◦
Ae Hxp + Aα ∆T ,
11p 11
p
M = B11 u◦
,x − ◦
D11 w,xx − e α
B11 Hxp − B11 ∆T , (4.15)
p
V = −B11 u◦
,xx + ◦
D11 w,xxx .
It is to be noted that the magnetic field will appear only in the force boundary conditions.
The FE equation begins by solving Equation (4.14) exactly. Taking only the static parts
of the Equation-(4.14) and simplifying, we can write it as
u◦ = 0,
,xxx
◦
w,xxxx = 0. (4.16)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-154-320.jpg)
![4.2. Super-Convergent Finite Element Formulations. 127
The solutions of Equation-(4.16), are:
u◦ = c0 + c1 x + c2 x2 , w◦ = c3 + c4 x + c5 x2 + c6 x3 , (4.17)
where c0 , c1 , c2 , c3 , c4 , c5 , c6 are seven unknown constants to be determined from six nodal
degrees of freedom (u◦ , w◦ , φ = ∂w◦ /∂x at the two nodes). Thus, there must be one
dependent constant, which can be obtained by substituting Equation-(4.17) in Equation-
(4.14) and Equation-(4.15). Introducing a variable βe as
B11
βe = 3 ,
A11
and substituting u◦ and w◦ in the static part of the governing differential equations
(Equation-(4.14)), we get c2 = βe c6 . Hence, the modified displacement fields can now
be written as
u◦ = c0 + c1 x + βe c6 x2 , w◦ = c3 + c4 x + c5 x2 + c6 x3 . (4.18)
For symmetric ply lay up, Bij = 0 and hence βe = 0. In this case axial and transverse
deformation gets uncoupled and the interpolation function reduces to that of simple rod
and Euler-Bernoulli beam, respectively. Equation-(4.18) can now be written in matrix
notation as
{u◦ w◦ w,x }T = [N (x)]{C},
◦
(4.19)
where [N (x)] is a matrix of dimension 3X6, which contains functions of x, i.e., x, x2 and
x3 . The unknown constant vector {C} is given by
{C} = {c0 c1 c3 c4 c5 c6 }T . (4.20)
First we relate the nodal degrees of freedom to the unknown constants by the definitions:
u◦ (x = 0) = u◦ ,
1 w◦ (x = 0) = w1 ,
◦
φ◦ (x = 0) = φ◦ ,
1
u◦ (x = L) = u◦ ,
2 w◦ (x = L) = w2 ,
◦
φ◦ (x = L) = φ◦ ,
2 (4.21)
which can be written in matrix notation as
{ue } = {u◦
1
◦
w1 φ◦
1 u◦
2
◦
w2 φ◦ }T = [G−1 ]{C},
2 (4.22)
and inverting this, we get
{C} = [G]{ue }. (4.23)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-155-320.jpg)
![128 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
Now this vector {C} is substituted in the Equation-(4.19) to get the mechanical displace-
ment for any arbitrary location in terms of nodal displacements {ue } as
{u◦ w◦ w,x }T = [N (x)][G]{ue }
◦ ¯
= [N (x)]{ue }, (4.24)
¯
where [N (x)] is the shape function matrix for mechanical degrees of freedom and are given
in Appendix-A. To obtain the stiffness matrix, forced boundary conditions (Equation-
(4.15)) are used where, Hxp and (∆T ) terms are used to get the equivalent nodal force
due to coil current and temperature rise respectively. Substituting the displacement field
from Equation-(4.18), the force resultants in Equation-(4.15) can be written in terms of
the unknown constants {C} as
{N V ¯
M }T = [G]{C} + {R}. (4.25)
Substituting the expression of {C} from Equation-(4.23), Equation-(4.25) can be written
as
{N V ¯
M }T = [G][G]{ue } + {R}. (4.26)
Evaluating Equation-(4.26) at x = 0 and x = L, we get the nodal load vector, {F } in
terms of nodal displacement {ue }, which can be written as
{F } = {−N (0) − V (0) − M (0) N (L) V (L) M (L)}T
¯
GG(x = 0) {R}(x = 0)
= ¯ {ue } + (4.27)
GG(x = L) {R}(x = L)
= [K]{ue } + {RT }(∆T ) + {RI }Inp ,
p
where [K] is the element stiffness matrix. {RT } and {RI } are element load vector coef-
ficient due to temperature rise and current actuation respectively. Explicit forms of [K],
{RT } and {RI } are given in Appendix A.
Next, the consistent element mass matrix [M ] is derived. It can be computed from
the expression:
L
[M ] = ˆ ˆ
([N (x)]T [ ][N (x)])dAdx, (4.28)
0 A
ˆ
where [N (x)] is another shape function, which can be calculated from longitudinal shape
¯
function [N (x)] as
1 0 −z
ˆ ¯
[N (x)] = 0 0 0 [N (x)]. (4.29)
0 1 0](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-156-320.jpg)








![4.3. Numerical Experiments. 137
50 mm
500 mm
0 0 m m
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 90 0 90
0 90 0 90
0 90 0 90
0 90 0 90
0 90 m m
[0 ] [0 /90 ] [m/0 /m] [m/0 /90 /m]
10 5 5 8 4 4
Figure 4.1: 10 layer composite cantilever beam with different layup sequence
B11 = 0, both the results are same. The ratio of tip deflections of the superconvergent
solution of the present element and the conventional element due to tip vertical load is
given by
4A11 D11
. (4.57)
4A11 D11 − B11 2
Next we will consider a case, where we have both coil current (Inp ) and temperature rise
(∆T ) (with out any tip load, FZ = 0). Tip deflections for both the formulations are same
for current and temperature load. The tip deflections due to both superconvergent and](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-165-320.jpg)

![4.3. Numerical Experiments. 139
L2 r(1 − 21ψ)(B11 Ae − A11 B11p )
11p
e
w◦ = Inp
p
3 (14ψ − 1)(A11 D11 − B11 2 ) + A11 L2 ψA55
L2 (1 − 21ψ)(B11 Aα − A11 B11 )
11
α
+ (∆T ),
3 (14ψ − 1)(A11 D11 − B11 2 ) + A11 L2 ψA55
Lr(1 − 14ψ)(B11 Ae − A11 B11p )
11p
e
φ = Inp
p
(14ψ − 1)(A11 D11 − B11 2 ) + A11 L2 ψA55
L(1 − 14ψ)(B11 Aα − A11 B11 )
11
α
+ (∆T ).
(14ψ − 1)(A11 D11 − B11 2 ) + A11 L2 ψA55
Ratio between tip deflection and tip slope for temperature rise or actuation current is
given by
w◦ L(1 − 21ψ)
=
φ 3(1 − 14ψ)
α
Similar to Euler-Bernoulli formulation, if A11 B11 = B11 Aα , irrespective of the thermal
11
coefficient distribution along the depth, beam will remain straight under temperature rise.
e
This effect will also be observed for actuation current, if A11 B11p = B11 Ae .
11p
4.3.1.3 Single Element Performance for Static Analysis
In this section, single element solution of static tip deflection and first three natural fre-
quencies are obtained for a 500 mm long 50 mm thick cantilever composite beam with
different lay up sequences (which is shown in Figure-4.1). Elastic modulus of composite
is taken as 181 GPa and 10.3 GPa in parallel and perpendicular direction of the fiber.
Poisson’s ratio, density and shear modulus of composite is assumed as 0.0, 1600 kg/m3
and 28 GPa respectively. Elastic modulus, Poisson’s ratio, shear modulus and density
of the magnetostrictive material is assumed as 30 GPa, 0.0, 23 GPa and 9250 kg/m3 re-
spectively. Magneto-mechanical coupling coefficient is taken as 15X10−9 m/amp. Results
are compared with 2-D plane strain finite element solution taking 100X10, four noded
quadratic elements. Single element RIFSDT results are also compared with the super
convergent and 2-D FEM results. Static tip deflections are calculated for tip vertical load
of 1 kN. Table-(4.1) shows the tip deflection for tip vertical load of [010 ] and [05 /905 ] lay
up sequence. For symmetric layup sequence ([010 ]), formulation of ScEB and CEB are
same hence their results are within 1.8% error. Here CFSDT, which is first order shear
deformable element with full integration, is giving absurd result of 94% error. RIFSDT
is showing 24.7% error and ScFSDT is within 0.2% error. Similarly for asymmetric layup](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-167-320.jpg)
![140 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
Table 4.1: Tip Deflection (mm) for Static Tip Load of 1 kN
[010 ] [05 /905 ]
CEB 0.442 (1.8 %) 1.766 (15.3 %)
ScEB 0.442 (1.8 %) 2.076 (0.5%)
CFSDT 0.027 (94 %) 0.028 (98.7%)
ScFSDT 0.449 (0.2 %) 2.083 (0.1%)
RIFSDT 0.339 (24.7 %) 1.564 (25%)
2D FEM 0.450 (0 %) 2.086 (0 %)
sequence ([05 /905 ]), CFSDT is giving an error of 98%. RIFSDT is showing 25% error
and ScFSDT is within 0.2% error. Table-(4.2) shows the tip deflection for [m/08 /m] and
Table 4.2: Tip Deflection (mm) for Static Tip Load of 1 kN
[m/08 /m] [m/04 /904 /m]
CEB uncoupled 0.746 (1.3%) 1.959 (11%)
ScEB uncoupled 0.746 (1.3%) 2.192 (0.4%)
CFSDT uncoupled 0.029 (96%) 0.293 (86.7%)
ScFSDT uncoupled 0.753 (0.4%) 2.200 (0.05%)
RIFSDT uncoupled 0.567 (25 %) 1.652 (25%)
2D FEM uncoupled 0.756 (0 %) 2.201 (0%)
CEB coupled 0.644 (1.3%) 1.327 (8.3%)
ScEB coupled 0.644 (1.3%) 1.439 (0.6%)
CFSDT coupled 0.029 (95.6%) 0.292 (80%)
ScFSDT coupled 0.651 (0.3%) 1.446 (0.07%)
RIFSDT coupled 0.490 (25%) 1.088 (24.8%)
2D FEM coupled 0.653 (0%) 1.447 (0%)
[m/04 /904 /m] lay up sequence for both coupled and uncoupled formulation. Here for both
coupled and uncoupled ScFSDT formulation, error in tip deflection is within 0.5 and 0.1%
in [m/08 /m] and [m/04 /904 /m] layup sequence respectively. For uncoupled formulation
([m/04 /904 /m]) CEB is giving 11% error. These errors for ScEB formulation are 1.3 and
0.6%. Super convergent formulation is giving less than 2.0% error, RIFSDT is giving 25%
error and CFSDT is above 80% error. Table-(4.3) shows the tip deflection for tip vertical
load for a beam with [m/08 /m] and [m/04 /904 /m] lay up sequence for both coupled and
uncoupled analysis. Static tip deflections are calculated for coil current of 1.0 ampere
with 20000 turn/m coil turns. As the difference between conventional and ScEB beam is
on vertical deflection for vertical load, results are same for actuation current, which gives
axial load and moment. Again, conventional FSDT gives absurd result.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-168-320.jpg)
![4.3. Numerical Experiments. 141
Table 4.3: Tip Deflection (mm) for Actuation Current
[m/08 /m] [m/04 /904 /m]
CEB uncoupled 0.1132 0.2105
ScEB uncoupled 0.1132 0.2105
CFSDT uncoupled 0.0043 0.0028
ScFSDT uncoupled 0.1132 0.2105
RIFSDT uncoupled 0.1132 0.2105
2D FEM uncoupled 0.1131 0.2106
CEB coupled 0.2112 0.3120
ScEB coupled 0.2112 0.3120
CFSDT coupled 0.0093 0.0063
ScFSDT coupled 0.2112 0.3120
RIFSDT coupled 0.2112 0.3124
2D FEM coupled 0.2109 0.3115
The results are showing that single super convergent element for both ScEB and
ScFSDT assumption is sufficient to get the tip deflection of the beam for tip vertical load
with in 2.0% error. Single element CFSDT is giving absurd result (error of 94-95%) due
to linear shape function use in element formulation even for thick beam. As the Euler
Bernoulli (EB) assumption is stiffer than FSDT assumption, error in ScEB formulation
(1.8%) is more than ScFSDT formulation (0.5%) and this difference is more for thicker
beams.
4.3.2 Free Vibration Analysis.
4.3.2.1 Single Element Analysis.
Table-(4.4) shows the natural frequencies for [010 ] and [05 /905 ] lay up sequence. First nat-
ural frequency for all the formulations is reasonable except for the conventional FSDT.
Second and third natural frequencies of the beam are best for ScFSDT and ScEB formu-
lations. Table-(4.5) shows the natural frequencies for [m/08 /m] and [m/04 /904 /m] lay
up sequence for both coupled and uncoupled analysis. First natural frequency for all the
formulations is reasonable except for the conventional FSDT. Second and third natural
frequencies are best for ScFSDT and ScEB formulations, when compared to 2-D FEM
results.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-169-320.jpg)
![142 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
Table 4.4: First Three Natural Frequencies (Hz)
[010 ] [05 /905 ]
CEB 344 3321 5864 180 2033 4460
ScEB 344 3321 5864 159 1510 4302
CFSDT 1179 5864 46541 1157 4254 46367
ScFSDT 341 3241 5864 158 1502 4303
RIFSDT 334 5864 3E18 155 4253 40237
2D FEM 338 1940 4865 157 948 2505
Table 4.5: First Three Natural Frequencies (Hz)
[m/08 /m] [m/04 /904 /m]
CEB uncoupled 189 1799 3827 121 1240 2899
ScEB uncoupled 189 1799 3827 110 1041 2845
CFSDT uncoupled 820 3827 24972 812 2828 24923
ScFSDT uncoupled 188 1772 3827 110 1036 2845
RIFSDT uncoupled 185 3827 16E14 108 2828 21631
2D FEM uncoupled 187 1087 2758 110 659 1740
CEB coupled 204 1937 3914 145 1435 3011
ScEB coupled 204 1937 3914 136 1286 2961
CFSDT coupled 822 3914 24991 814 2945 24942
ScFSDT coupled 202 1903 3914 136 1276 2962
RIFSDT coupled 298 3914 53E5 133 2945 21654
2D FEM coupled 200 1116 2940 135 808 2116
4.3.3 Super convergence Study.
4.3.3.1 Free Vibration Analysis.
Figure-4.2 shows the percentage errors of the first 10 natural frequencies of [010 ] layup
sequence. Here we have compared the natural frequencies for RIFSDT, ScFSDT, CEB
(CEB and ScEB are same for symmetric layup sequence), FSDT Full (CFSDT) and 2-D
FEM formulation. For first seven natural frequencies, 10 ScFSDT elements give better
result than 20 RIFSDT elements. This shows the super convergence properties of the
ScFSDT elements. The 8th , 9th and 10th natural frequencies for 20 elements RIFSDT
gives little better result than 10 elements ScFSDT. Figure-4.3 shows the percentage errors
of the first 10 natural frequencies of [05 /905 ] layup sequence. Here all first 10 natural
frequencies 10 ScFSDT elements give better result than 20 RIFSDT elements. Similarly
10 ScEB elements give better result than 20 CEB elements. This shows that asymmetric
layup sequence exhibit a greater level of super convergence property. 20 elements FSDT](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-170-320.jpg)
![4.3. Numerical Experiments. 143
25
500X10 2D−FEM
20 RIFSDT
10 CEB
10 ScFSDT
20
10 FSDT Full
Natural Frequency Error (%)
15
10
5
0
1 2 3 4 5 6 7 8 9 10
Frequency Number
Figure 4.2: Natural Frequency for Cantilever Beam with [010 ] Layup sequence
25
500X10 2D−FEM
20 RIFSDT
10 ScEB
20 CEB
20
10 ScFSDT
Natural Frequency Error (%)
20 CFSDT
15
10
5
0
1 2 3 4 5 6 7 8 9 10
Frequency
Figure 4.3: Natural Frequency for Cantilever Beam with [05 /905 ] Layup sequence](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-171-320.jpg)
![144 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
60
500X10 2D−FEM
20 RIFSDT
10 ScEB
50 10 ScFSDT
20 CFSDT
Natural Frequency Error (%)
40
30
20
10
0
1 2 3 4 5 6 7 8 9 10
Frequency Number
Figure 4.4: Natural Frequency for Beam with Coupled, [m/08 /m] Layup sequence
60
500X10 2D−FEM
20 RIFSDT
10 ScEB
50 10 ScFSDT
20 CFSDT
Natural Frequency Error (%)
40
30
20
10
0
1 2 3 4 5 6 7 8 9 10
Frequency Number
Figure 4.5: Natural Frequency for Beam with Uncoupled, [m/08 /m] Layup sequence](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-172-320.jpg)
![4.3. Numerical Experiments. 145
25
500X10 2D−FEM
20 RIFSDT
10 ScEB
20 CEB
20
10 ScFSDT
Natural Frequency Error (%)
20 CFSDT
15
10
5
0
1 2 3 4 5 6 7 8 9 10
Frequency
Figure 4.6: Natural Frequency for Beam with Coupled, [m/04 /904 /m] Layup sequence
25
500X10 2D−FEM
20 RIFSDT
10 ScEB
20 CEB
20
10 ScFSDT
Natural Frequency Error (%)
20 CFSDT
15
10
5
0
1 2 3 4 5 6 7 8 9 10
Frequency
Figure 4.7: Natural Frequency for Beam with Uncoupled, [m/04 /904 /m] Layup sequence](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-173-320.jpg)
![146 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
Full (CFSDT) gives worst result for this asymmetric layup sequence.
Figure-4.4 and Figure-4.5 show the percentage errors of the first 10 natural frequencies of
coupled and uncoupled material model for [m/08 /m] layup sequence. In this symmetric
layup sequence, first 8 natural frequencies with 10 ScFSDT elements give better result
than 20 RIFSDT elements. The 9th and 10th natural frequencies for 20 elements RIFSDT
give little better result than 10 elements ScFSDT.
Figure-4.6 and Figure-4.7 show the percentage errors of the first 10 natural frequencies
of coupled and uncoupled material model for [m/04 /904 /m] layup sequence. In coupled
formulation, first 9 natural frequencies for 10 ScFSDT elements show better result than 20
RIFSDT elements. Similarly 10 ScEB elements give better result than 20 CEB elements.
In uncoupled formulation (where asymmetry is more than in the coupled formulation),
for first 10 natural frequencies (except 8th ) using 10 ScFSDT elements give better result
than 20 RIFSDT elements. Again results from 20 CEB elements are comparable with
10 ScEB elements. Twenty elements of FSDT Full (CFSDT) give worst result for this
asymmetric layup sequence. This study to a reasonable extent has shown the super-
convergent character of the formulated elements. This can be further studied using the
time history analysis, which is given next.
4.3.3.2 Time History Analysis.
Vertical impact load shown in Figure-4.8 is applied at the cantilever tip. Tip response and
the open circuit voltage in the sensor coil are obtained for different number of elements for
this impact loading. Figure-4.9 shows the effect of beam assumption on tip velocity of the
cantilever beam taking 100 elements of ScEB and ScFSDT and the results are compared
with 2-D FEM, which is modelled with 1000 2D four noded plane stress element. Two
aspects are very clear from this study. A 100 element ScFSDT model compares very
well with 2D FEM solution and the waves in shear deformable beams travel much slower
compared to elementary beam. This can be seen as early arrival of reflection in ScEB
model. Figure-4.10(a) shows the super convergent properties of the ScFSDT element for
a unidirectional laminate. Here 10 ScFSDT element model is giving similar result as 20
RIFSDT elements and these match well with 2D FEM solution.
Figure-4.10(b) shows the tip velocity history for [05 /905 ] layup sequence. Here 10 of
ScFSDT elements are giving better result than 20 RIFSDT elements. Figure-4.11 shows
the open circuit voltages generated in a laminate of [m/08 /m] layup sequence due to tip
vertical impact. Here 10 ScFSDT elements are giving better result than 20 RIFSDT ele-](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-174-320.jpg)
![4.3. Numerical Experiments. 147
0.9 −5
x 10
2.5
0.8
2
0.7
Frequency Content
0.6 1.5
Force (kN)
0.5
1
0.4
0.5
0.3
0
0.2 0 50 100
Frequency (kHz)
0.1
0
0 100 200 300 400 500 600
Time (µ sec)
Figure 4.8: 50 kHz Broadband Force History with Frequency Content (inset)
−5
x 10
12
10
8
6
Velocity (m/Sec)
4
2
0
−2
−4
−6
100 Elements ScEB
−8 100 Elements ScFSDT
100X10 Elements 2D−FEM
0 1 2 3 4 5
Time (Sec) −4
x 10
Figure 4.9: Effect of Beam Assumption on Tip Response [010 ]](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-175-320.jpg)

![4.3. Numerical Experiments. 149
0.15
0.1
Open Circuit Voltage (volt)
0.05
0
−0.05
−0.1 10 Elements RIFSDT
20 Elements RIFSDT
10 Elements ScFSDT
−0.15 100X10 Elements 2D−FEM
0 1 2 3 4 5 6
Time (Sec) x 10
−4
Figure 4.11: Open circuit voltage for Coupled, [m/08 /s] Layup sequence
ments. These studies have shown that the formulated element is indeed superconvergent
and can find great utilities in the SHM application. In the next section, we will use this
formulated element to perform an inverse problem of material property identification us-
ing the measured response. In this problem, very high degrees of intensive computations
are required and the superconvergent property of the formulated element can reduce the
problem size considerably.
4.3.4 Material Property Identification
The objective of this subsection is to identify the modulus of elasticity and magnetome-
chanical coefficient of magnetostrictive patches from the response of sensor using super
convergent elements and Artificial Neural Network (ANN). First, the sensor response is
computed for varying modulus of elasticity for a particular value of magnetomechanical](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-177-320.jpg)
![150 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
coefficient and shown that the modulus of elasticity can be identified with a polynomial
relationship from peak value of the sensor response. Similarly, in the next study, varying
values of magnetomechanical coefficient with fixed value of elastic modulus is used for
identification of magnetomechanical coefficient, which also gives a simplified polynomial
relationship to identify the magnetomechanical coefficient from peak value of the sensor
response. Finally studies are also performed for cases when both the values are vary-
ing. Due to the complexity of the problem ANN is used for identification of both elastic
modulus and magnetomechanical coefficient.
4.3.4.1 Elastic Modulus Identification
Figure-4.12 shows the sensor response of [m/04 /904 /s] layup sequence due to impact
load (shown in Figure-4.8) at the tip of the cantilever, where s stands for sensor layer.
Considering magnetomechanical coefficient as 15 nano-m/amp and three different values
of modulus, three different responses are obtained. Initial peak amplitudes for 25, 30 and
35 GPa module are 323, 468 and 736 mili-volt respectively. The initial peak values (Vp )
of these open circuit voltage histories are increased for increased values of modulus of
elasticity. One direct polynomial can be used to identify the modulus of elasticity from
these peak values or vice versa. From these three sample points, one quadratic polynomial
is drawn and elastic modulus (E) or initial peak value (Vp ) is expressed as:
Vp = 2.462X10−3 E 2 − 0.10642E + 1.4447,
E = −38.341Vp 2 + 64.822Vp + 8.0588. (4.61)
Now these results are validated for two other values of modulus, namely 27 and 32 GPa,
respectively. Initial peak values of voltage histories for corresponding module are 372
and 554 mili-volt respectively from finite element analysis. And the predicted elastic
moduli from this polynomial are 26.88 and 32.19 GPa respectively, which are with in 1%
of accuracy.
4.3.4.2 Magnetomechanical Coefficient Identification
Figure-4.13 shows the sensor response of the [m/04 /904 /s] layup sequence due to impact
load (shown in Figure-4.8) at the tip of the cantilever. Considering magnetomechanical
coefficient as 5, 10 and 15 nano-m/amp and with a fixed value of modulus as 30 GPa,
three different curves are obtained. The initial peak values of open circuit voltages are
increased for increased values of magnetomechanical coefficient. One direct polynomial](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-178-320.jpg)
![4.3. Numerical Experiments. 151
0.8
0.6
Open Circuit Voltages (volt)
0.4
0.2
0
−0.2
−0.4 E=25 GPa
E=30 GPa
E=35 GPa
0 1 2 3 4 5 6
Time (sec) x 10
−4
Figure 4.12: Sensor voltage for coupled, [m/04 /904 /s] with varying elasticity
0.4
0.3
Open Circuit Voltages (volt)
0.2
0.1
0
−0.1
−0.2
−0.3
d=5 nano−m/amp
−0.4 d=10 nano−m/amp
d=15 nano−m/amp
0 1 2 3 4 5 6
Time (sec) x 10
−4
Figure 4.13: Sensor voltage for Coupled, [m/04 /904 /s] with varying coupling coefficient](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-179-320.jpg)
![152 Chapter 4. Superconvergent Beam Element with Magnetostrictive Patches
is used to identify the magnetomechanical coefficient from this peak value or vice versa.
From these three sample points two quadratic polynomials are drawn as:
Vp = 3.9878X1015 d2 − 3.9603X107 d + 0.16486,
d = −8.1759X10−8 Vp 2 + 6.8613X10−8 Vp + 7.967. (4.62)
For validation of these curves, two other values of coupling coefficient, namely, 7 and 12
nano-m/amp are used in simulation. Initial peak values considering corresponding coeffi-
cients are 99 and 238 mili-volt respectively from finite element analysis. And the predicted
coupling coefficients from above polynomial are 6.8 and 12.5 nano-m/amp respectively,
which are with in 4% of accuracy.
4.3.4.3 Material Properties Identification using ANN
0.15
Open Circuit Voltages (volt)
0.1
0.05
0
−0.05
d=5 nano−m/amp; E=25 GPa
−0.1 d=5 nano−m/amp; E=35 GPa
d=10 nano−m/amp; E=25 GPa
d=10 nano−m/amp; E=35 GPa
0 1 2 3 4 5 6
Time (sec) x 10
−4
Figure 4.14: Open circuit voltage for Coupled, [m/04 /904 /s] layup sequence](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-180-320.jpg)
![4.3. Numerical Experiments. 153
In the above discussion, either coupling coefficient is identified assuming elastic
modulus of magnetostrictive materials or modulus of elasticity is identified assuming
magnetomechanical coupling coefficient. But in real time structural health monitoring
application both the values should be identified simultaneously using measured sensor
responses. Figure-4.14 shows the sensor response of the [m/04 /904 /s] layup sequence due
to impact load shown in Figure-4.8 considering both magnetomechanical coefficient and
modulus of elasticity as varying. The initial peak value of open circuit voltages are in-
creased due to increase of both these values as shown in earlier two figures. Hence, it is not
possible to identify both the properties from initial peak values of open circuit voltages.
Hence, utilization of the rest of the response histories is essential in this identification,
which can be performed using Artificial Neural Network (ANN) easily.
The main goal of this subsection is to establish a mapping relation from sensor
response histories to the material properties. ANN is trained and validated for this map-
ping. Training of ANN is performed through 121 sample response histories, which are
consist of 11 values of elastic modulus (from 25 to 35 GPa with increment of 1 GPa)
each for 11 values of magnetomechanical coupling coefficients (from 5 to 15 nano-m/amp
with increment of 1 nano-m/amp). Every simulation takes about 30 seconds in Pentium-4
processor with the use of 20 ScFSDT elements. Hence, total time required for simulation
of training samples is about one hour. On the other hand, every simulation using 50
RIFSDT elements takes one minute, and hence about 2 hours are required for all sam-
ples. Response histories are captured upto 600 time steps. Hence, if raw responses are
directly fed into ANN as input, input space of the ANN architecture will be 600, which
will be difficult to manage. Hence, some specific peak values and their corresponding
location of response histories is considered for input space of the ANN. Whole response
histories are divided into three parts. First part is from 0 to 200 µ sec, middle part is
from 200 to 400 µ sec, and last part is from 400 to 600 µ sec. In the first part only
peak value of response histories (shown in Table-4.6) is taken as first input node for the
ANN mapping. Location of the first peak value are not considered as input node of ANN,
since the sensitivity of that location regarding elastic modulus or magnetomechanical co-
efficient is less. From middle and last part of the response histories peak values (shown
in Table-4.7, 4.9) and peak locations (shown in Table-4.8, 4.10) are taken as other four
input nodes. Total five input nodes are considered as input space of ANN mapping. Two
output nodes are considered, one for elastic modulus and other for magnetomechanical
coefficient as output space of the ANN mapping. To determine the architecture of the](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-181-320.jpg)



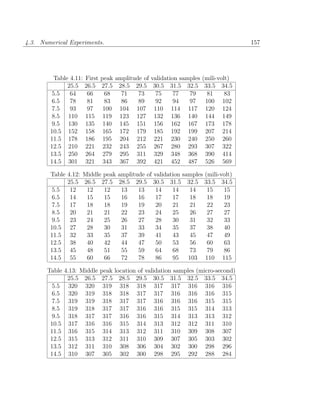

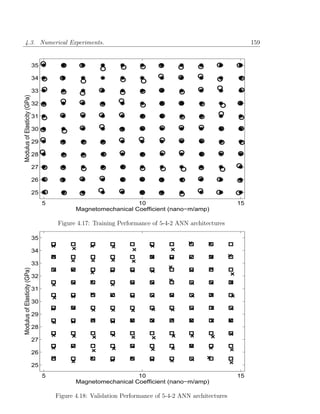


![Chapter 5
Spectral FE Analysis with
Magnetostrictive Patches
5.1 Introduction
As mentioned earlier, determination of smaller cracks requires signals having high fre-
quency content. That is, the problem translates itself to a wave propagation problem,
wherein, in addition to phase information of the response being important, higher order
modes participate in the response. For such problem, FEM requires enormous mesh sizes.
This problem can be alleviated little using superconvergent elements. The best way to
handle such situation is to formulate elements in the frequency domain. Spectral FE is
one such formulation that will be addressed in this chapter.
Wave propagation in a structure is caused by high frequency impact loading. When
such loading is applied to a structure, it will force all the higher-order modes to participate
in the response. At high frequencies, the wavelength is small and for an accurate predic-
tion by the finite element (FE) method, the element length should be one fourth to one
sixth of the wavelength [196]. Hence, FE analysis of wave propagation incurs heavy com-
putational costs. The spectral element method (SEM) is arguably the best alternative for
such problems [108]. The method is based upon the domain transfer method. Here, the
governing equation is transformed first into the frequency domain using a discrete Fourier
transform (DFT). In doing so, for 1-D waveguides, the governing partial differential equa-
tion (PDE) is reduced to a set of ordinary differential equations (ODE) with constant
coefficients, where the time coordinate gives way to the frequency, which is introduced as
a parameter. The resulting ODEs can be solved exactly. The elements are formulated
using the exact solution of the governing ODEs as an interpolating function. The use
of the exact solution results in an exact mass distribution and thus in an exact dynamic
162](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-190-320.jpg)

![164 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
7. The classical static stiffness matrix can be obtained from the spectral stiffness matrix
in a zero-frequency limit.
8. Responses can be viewed both in time and frequency domain in a single analysis.
The frequency domain information such as transfer functions and system functions
are generated automatically.
9. The method is easily amenable for control related problems. A novel active spectral
element (see [246]) is formulated for this purpose. This has great utility in smart
structure research for noise and vibration suppression.
10. As opposed to using modal analysis, in the SFEM is based on computation of
wavenumbers and frequency domain fields (displacements, strains, stresses etc.) i.e.
the spectral amplitudes, at each frequency sampling points in FFT. The consid-
eration of frequency bandwidth is not limited by the choice of the finite element
discretization, i.e. even a single Spectral Element can be used for a uniform beam
excited by high frequency loads. Also, the time history of the applied load can be
arbitrary.
11. Cut-off frequency is one parameter that determines the need for higher order beam
theory. In elementary beams, the cut-off frequency is at infinity i.e. shear mode
appears as evanescent mode, which never propagates. If the frequency of interest is
within the occurrence of the cut-off frequency, then the elementary beam theory is
sufficient to predict the response. In FSDT the shear mode, which is evanescent to
start with, begins to propagate beyond cut-off frequency. This aspect will be dwelt
in greater detail in this chapter.
5.1.1 Existing Literature
Spectral elements for an elementary rod [109], elementary beam [110], [111], elementary
composite beam [249], composite tube [250], and a 2-D membrane element [330] are
reported in literature.
Several higher-order spectral elements for isotropic and anisotropic one-dimensional
wave guides are available in the literature. Spectral elements are developed for the
isotropic Mindlin Herman rod [256], the isotropic Timoshenko beam [140] and the com-
posite Timoshenko beam [248].](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-192-320.jpg)
![5.1. Introduction 165
Introducing Poisson’s contraction and its higher order gradients in the displacement
field give rise to additional propagating modes at high frequencies. In addition, the
longitudinal wave in the structure becomes dispersive. Conventional Higher order Shear
Deformation Theory (HSDT) allows no depth wise variation of transverse displacement.
Further, the displacement field with lateral contraction predicts nonzero normal stress,
which is altogether neglected in HSDT. Hence, for a deep beam and high frequency
loading, HSDT will not predict the accurate dynamic response of the structure. An exact
FE was developed for isotropic materials by Gopalakrishnan [139], which takes Poisson’s
contraction into account. More recently, an exact FE is developed for a composite beam
with Poisson’s contraction [64]. Extensive study on wave propagation in anisotropic and
inhomogeneous structure is done by Chakraborty in reference [59]. In this study, he has
shown that the dispersiveness of an axial mode is due to the presence of lateral contraction.
In recent study, Batra and Aimmanee [31] used finite element mixed formulation to satisfy
traction boundary conditions on the top and the bottom surfaces with higher order shear
and normal deformable plate theories.
In this chapter, a new higher order spectral element is developed for wave propaga-
tion analysis of a magnetostrictive embedded composite beam in the presence of thermal,
magnetic and mechanical loading. The element is based on the coupled formulation of
Higher order Shear deformation with higher order Poisson contraction Theory (HSPT).
The HSDT is enhanced through the introduction of higher number of lateral contractional
mode. Numerical examples are directed towards highlighting the effect of the requirement
of higher order theories on the structural and magnetic responses. The spectrum and the
dispersion relations are studied in detail. Response of structure for high frequency mod-
ulated pulse with different order of beam assumption is outlined and shown the error
in lower order models. Magnetostrictive sensor open circuit voltages due to broadband
force excitation are computed. Finally, as a demonstration of its capability to handle
inverse problems, applied broadband force history in a cantilever composite beam is re-
constructed from the response of magnetostrictive sensor open circuit voltage history,
using deconvolution property of the spectral formulation.
This chapter is organized as follows. First the variational formulation is illustrated
to obtain the governing differential equations of Higher order Shear deformable and Pois-
son contractible (HSPT) beam. Subsequently, we derive spectral solution for these gov-
erning equations and formulate the spectral finite element of the beam element with
embedded magnetostrictive patches. In Section-5.4, several examples are considered for](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-193-320.jpg)

![5.2. FE Formulation of an nth Order Shear Deformable Beam with nth Order Poisson’s Contraction167
to be of the form
σxx ¯ ¯
Q11 Q13 0 εxx e11
σzz ¯ ¯
= Q13 Q33 0 εzz − e13 H,
¯ 55 γxz e15
τxz 0 0 Q
εxx
Bxx = e11 e13 e15 εzz + µ H, (5.4)
γxz
where σxx and εxx , are normal stresses and normal strains in the x direction, σzz and εzz ,
are normal stresses and normal strains in the z direction and τxz and γxz are shear stress
¯ ¯ ¯ ¯
and shear strain in the x − z plane. Q11 (z), Q13 (z), Q33 (z) and Q55 (z) are Young’s and
Shear module, which are functions of depth z. The strain energy (S), magnetic energy
(Wm ) and kinetic energy (T ) are then given by
L
1
S = (σxx εxx + σzz εzz + τxz γxz ) dA dx ,
2 0 A
L
1
Wm = ( Bxx H + Inµσ H) dA dx ,
0 A 2
L
1 ˙2 ˙2
T = (z)(U + W ) dA dx , (5.5)
2 0 A
where (˙) denotes the time derivative. Here (z), L and A are the density, the length and
the area of cross-section of the beam, respectively. Applying Hamilton’s principle, the
following differential equations of motion are obtained in terms of the mechanical degrees
of freedom (u0 , w0 , wi and ui ) and magnetic degrees of freedom H :
Un Un Wn
∂ 2u [i] ∂ ui2
[i−1] ∂wi
∂u0 : I 0 u0 +
¨ Ii ui − A11 2 −
¨ A11 − iA13
i=1
∂x i=1
∂x2 i=1
∂x
∂H
+Ae
11 =0, (5.6)
∂x
Un 2 Un 2 Wn
[m] ∂ u [i+m] ∂ ui [i+m−1] ∂wi
∂um : I[m] u0 +
¨ I[i+m] ui −
¨ A11 − A11 − iA13
i=1
∂x2 i=1
∂x2 i=1
∂x
Wn Un
[m−1] ∂w0 [i+m−1] ∂wi [i+m−2]
+mA55 + mA55 + imA55 ui
∂x i=1
∂x i=1
[m] ∂H [m−1]
+A11e − mA15e H = 0 , (5.7)
∂x](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-195-320.jpg)
![168 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Wn Un Wn
∂ 2w [i−1] ∂ui [i] ∂ 2 wi
∂w0 : I0 w0 +
¨ Ii wi − A55 2 −
¨ iA55 − A55
i=1
∂x i=1
∂x i=1
∂x2
∂H
+Ae
15 =0, (5.8)
∂x
Wn Un Wn
[m−1] ∂u0 [i+m−1] ∂ui [i+m−2]
∂wm : I[m] w0 +
¨ Ii+m wi + mA13
¨ +m A13 + imA33 wi
i=1
∂x i=1
∂x i=1
2 Un Wn 2
[m] ∂ w [i+m−1] ∂ui [i+m] ∂ wi
−A55 − iA55 − kd A55
∂x2 i=1
∂x i=1
∂x2
[m−1] [m−1] [m−1] [m] ∂H
−mA13α (∆T ) − mA33α (∆T ) − mA13e H + A15e =0, (5.9)
∂x
Un Wn Un
[0] ∂u0 [i] ∂ui [i−1] [0] ∂w0 [i−1]
∂H : −A11e − A11e − iA13e wi − A15e − iA15e ui
∂x i=1
∂x i=1
∂x i=1
Wn
[i] ∂wi
− A15e − Aµ H + InAσ + (A11eα + A13eα )(∆T ) = 0 ,
µ (5.10)
i=1
∂x
The associated force boundary conditions are given by
Un Wn
[0] [0] ∂u0 [i] ∂ui [i−1] [0] [0] [0]
Nx = A11 + A11 + iA13 wi − A11e H + (A11α + B13α )(∆T ) ,
∂x i=1
∂x i=1
Un Wn
[m] [m] ∂u0 [i+m] ∂ui [m] [m] [i+m−1] [m]
Nx = A11 + A11 + (A11α + B13α )(∆T ) + iA13 wi − A11e H ,
∂x i=1
∂x i=1
Un Wn
[0] ∂w0 [i−1] [i] ∂wi [0]
Vx[0] = A55 + iA55 ui + A55 − A15e H ,
∂x i=1 i=1
∂x
Un Wn
[m] ∂w0 [i+m−1] [i+m] ∂wi [m]
Vx[m] = A55 + iA55 ui + A55 − A15e H , (5.11)
∂x i=1 i=1
∂x
at two ends of the beam. Here I0 , I1 , I2 , ...In are the mass, first moment of mass and
second moment of mass ... nth moment of mass per unit length of the beam. These mass
moments are given by
+h/2
[Ik ] = (z)[z k ]bdz . (5.12)
−h/2
where the stiffness coefficients are given by
+h/2
Aij
[k]
= ¯
Qij z k bdz , (5.13)
−h/2](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-196-320.jpg)
![5.2. FE Formulation of an nth Order Shear Deformable Beam with nth Order Poisson’s Contraction169
The cross-sectional constant strain and constant stress permeability coefficients are writ-
ten as
+h/2
Aµ Aσ
µ = [µ µσ ] bdz , (5.14)
−h/2
and similarly the cross-sectional magneto-mechanical and thermo-magnetic coupling stress
coefficients can be written as
+h/2
[k] [k]
Aije Aijeα = eij z k [1 α] bdz , (5.15)
−h/2
The cross-sectional thermal stiffness coefficients, are similarly written as
+h/2
[k]
Aijα = ¯
αQij z k bdz , (5.16)
−h/2
Form Equation-(5.10), H can be written as
Un Wn Un
1 [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0 [i−1]
H=− A11e + A11e + iA13e wi + A15e + iA15e ui
Aµ ∂x i=1
∂x i=1
∂x i=1
Wn
[i] ∂wi
+ A15e − InAσ − (A11eα + A13eα )(∆T ) ,
µ (5.17)
i=1
∂x
and
2 Un 2 Wn
∂H 1 [0] ∂ u [i] ∂ ui [i−1] ∂wi [0] ∂ 2w
=− A11e 2 + A11e + iA13e + A15e
∂x Aµ ∂x i=1
∂x2 i=1
∂x ∂x2
Un Wn
[i−1] ∂ui [i] ∂ 2 wi
+ iA15e + A15e , (5.18)
i=1
∂x i=1
∂x2
substituting H in Equations-(5.6-5.9) we get
Un Un Wn
∂ 2u [i] ∂
2
ui [i−1] ∂wi
∂u0 : I0 u0 +
¨ Ii ui − A11 2 −
¨ A11 − iA13 .
i=1
∂x i=1
∂x2 i=1
∂x
Un Wn
Ae 2
[0] ∂ u [i] ∂ ui2
[i−1] ∂wi [0] ∂ 2w
− 11 A11e 2 + A11e + iA13e + A15e
Aµ ∂x i=1
∂x2 i=1
∂x ∂x2](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-197-320.jpg)
![170 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Un Wn
[i−1] ∂ui [i] ∂ 2 wi
+ iA15e + A15e =0, (5.19)
i=1
∂x i=1
∂x2
Wn Un Wn
∂ 2w [i−1] ∂ui [i] ∂ 2 wi
∂w0 : I0 w0 +
¨ Ii wi − A55
¨ − iA55 − A55 .
i=1
∂x2 i=1
∂x i=1
∂x2
Un Wn
Ae 2
[0] ∂ u [i] ∂
2
ui [i−1] ∂wi [0] ∂ 2w
− 15 A11e 2 + A11e + iA13e + A15e
Aµ ∂x i=1
∂x2 i=1
∂x ∂x2
Un Wn
[i−1] ∂ui [i] ∂ 2 wi
+ iA15e + A15e =0, (5.20)
i=1
∂x i=1
∂x2
Wn Un Wn
[m−1] ∂u0 [i+m−1] ∂ui [i+m−2]
∂wm : I[m] w0 +
¨ Ii+m wi +
¨ mA13 +m A13 + imA33 wi
i=1
∂x i=1
∂x i=1
2 Un Wn 2
[m] ∂ w [i+m−1] ∂ui [i+m] ∂ wi
−A55 − iA55 − kd A55
∂x2 i=1
∂x i=1
∂x2
[m] 2 Un 2 Wn
A [0] ∂ u [i] ∂ ui [i−1] ∂wi [0] ∂ 2w
− 15e A11e 2 + A11e + iA13e + A15e
Aµ ∂x i=1
∂x2 i=1
∂x ∂x2
Un Wn
[i−1] ∂ui [i] ∂ 2 wi
+ iA15e + A15e
i=1
∂x i=1
∂x2
[m−1] Un Wn
mA13e [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0
+ A11e + A11e + iA13e wi + A15e
Aµ ∂x i=1
∂x i=1
∂x
Un Wn
[i−1] [i] ∂wi [m] [m]
+ iA15e ui + A15e + VbT + VbI = 0 , (5.21)
i=1 i=1
∂x
Un 2 Un 2 Wn
[m] ∂ u [i+m] ∂ ui [i+m−1] ∂wi
∂um : I[m] u0 +
¨ I[i+m] ui −
¨ A11 − A11 − iA13
i=1
∂x2 i=1
∂x2 i=1
∂x](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-198-320.jpg)
![5.2. FE Formulation of an nth Order Shear Deformable Beam with nth Order Poisson’s Contraction171
Wn Un
[m−1] ∂w0 [i+m−1] ∂wi [i+m−2]
+mA55 + mA55 + imA55 ui
∂x i=1
∂x i=1
[m] 2 Un 2 Wn 2
A11e [0] ∂ u [i] ∂ ui [i−1] ∂wi [0] ∂ w
− A11e 2 + A11e + iA13e + A15e
Aµ ∂x i=1
∂x2 i=1
∂x ∂x2
Un Wn
[i−1] ∂ui [i] ∂ 2 wi
+ iA15e + A15e
i=1
∂x i=1
∂x2
[m−1] Un Wn
mA15e [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0
+ A11e + A11e + iA13e wi + A15e
Aµ ∂x i=1
∂x i=1
∂x
Un Wn
[i−1] [i] ∂wi [m] [m]
+ iA15e ui + A15e + NbT + NbI = 0 , (5.22)
i=1 i=1
∂x
Similarly, boundary conditions from Equation-(5.11) can be written as
Un Wn
[0] [0] ∂u0 [i] ∂ui [i−1]
Nx = A11 + A11 + iA13 wi .
∂x i=1
∂x i=1
[0] Un Wn
A11e [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0
+ A11e + A11e + iA13e wi + A15e
Aµ ∂x i=1
∂x i=1
∂x
Un Wn
[i−1] [i] ∂wi [0] [0]
+ iA15e ui + A15e + NnT + NnI ,
i=1 i=1
∂x
Un Wn
[m] [m] ∂u0 [i+m] ∂ui [i+m−1]
Nx = A11 + A11 + iA13 wi .
∂x i=1
∂x i=1
[m] Un Wn
A11e [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0
+ A11e + A11e + iA13e wi + A15e
Aµ ∂x i=1
∂x i=1
∂x](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-199-320.jpg)
![172 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Un Wn
[i−1] [i] ∂wi [m] [m]
+ iA15e ui + A15e + NnT + NnI ,
i=1 i=1
∂x
Un Wn
[0] ∂w0 [i−1] [i] ∂wi
Vx[0] = A55 + iA55 ui + A55 .
∂x i=1 i=1
∂x
[0] Un Wn
A15e [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0
+ A11e + A11e + iA13e wi + A15e
Aµ ∂x i=1
∂x i=1
∂x
Un Wn
[i−1] [i] ∂wi [0] [0]
+ iA15e ui + A15e + VnT + VnI ,
i=1 i=1
∂x
Un Wn
[m] ∂w0 [i+m−1] [i+m] ∂wi
Vx[m] = A55 + iA55 ui + A55
∂x i=1 i=1
∂x
[m] Un Wn
A15e [0] ∂u0 [i] ∂ui [i−1] [0] ∂w0
+ A11e + A11e + iA13e wi + A15e
Aµ ∂x i=1
∂x i=1
∂x
Un Wn
[i−1] [i] ∂wi [m] [m]
+ iA15e ui + A15e + VnT + VnI , (5.23)
i=1 i=1
∂x
[m] [m] [0] [m] [m] [0] [m] [m] [0] [m] [m] [0]
Where NbI , VbI , NnI , NnI , VnI , VnI , NbT , VbT , NnT , NnT , VnT , VnT are given by
[m−1] [m−1]
[m] mA13e [m] mA15e
VbI = − InAσ
µ , NbI =− InAσ ,
µ
Aµ Aµ
[0] [m]
[0] A11e [m] A11e
NnI = − InAσ ,
µ NnI = − InAσ ,
µ
Aµ Aµ
[m] [0]
[m] A [0] A
VnI = − 15e InAσ ,
µ VnI = − 15e InAσ ,
µ (5.24)
Aµ Aµ
[m−1]
[m] [m−1] [m−1] mA13e
VbT = −mA13α (∆T ) − mA33α (∆T ) − [(A11eα + A13eα )(∆T )] ,
Aµ](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-200-320.jpg)
![5.3. Spectral Finite Element Formulation of Beam 173
[m−1]
[m] mA15e
NbT = − [(A11eα + A13eα )(∆T )] , .
Aµ
[0]
[0] [0] [0] A
NnT = (A11α + B13α )(∆T ) − 11e [(A11eα + A13eα )(∆T )] , .
Aµ
[m]
[m] [m] [m] A11e
NnT = (A11α + B13α )(∆T ) − [(A11eα + A13eα )(∆T )] , .
Aµ
[m]
[m] A
VnT = − 15e [(A11eα + A13eα )(∆T )] , .
Aµ
[0]
[0] A15e
VnT = − [(A11eα + A13eα )(∆T )] , (5.25)
Aµ
5.2.1 Conventional FE Matrices
Conventional finite element formulation for nth order shear deformable beam with nth
order contraction mode is deduced from 3D FE formulation given in Section-3.2. Elements
of stiffness [K], coupling stiffness [K m ] and mass [M ] matrices, are given in Appendix-C.
5.3 Spectral Finite Element Formulation of Beam
For the element formulation, the governing equations will be considered in absence of any
body force, current actuation and temperature increase. We seek a time harmonic wave
solution,
{u} = {u0 u1 u2 ... uU n w0 w1 w2 ... wW n } (5.26)
where the displacement can be written in terms of forward fourier transform as
N
{u(x, t)} = { u0
˜ u1
˜ ... u˜ n
U w0
˜ w1
˜ ... wW n }(x)e−jωn t
˜
n=1
N
= ˜
{u(x)}e−jωn t (5.27)
n=1
where ωn is the circular frequency at the nth sampling point. N is the frequency
index corresponding to the Nyquist frequency in the fast Fourier transform (FFT) used](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-201-320.jpg)
![174 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
for computer implementation. When Equation-(5.27) is substituted into the governing
equations, a set of ordinary differential equations (ODEs) is obtained for u0 (x) and w0 (x).
˜ ˜
Since the ODEs are of constant coefficients, the solution is of the form {u0 }e−jkx , where k is
˜
called the wavenumber and {u0 } is a vector of unknown constants. Thus, the displacement
˜
field is of the form of ζe−j(kx+ωt) , (ζ is independent of x and t), i.e., a plane wave solution
is assumed. Substituting the assumed form into the set of ODEs, a matrix-vector relation
is obtained:
[W ]{u0 } = 0 (5.28)
where
Wu0 u0 Wui u0 Ww0 u0 Wwm u0
W Wui um Ww0 ui Wwm ui
[W ] = u0 um
Wu0 w0 Wui w0 Ww0 w0 Wwi w0 (5.29)
Wu0 wm Wui wm Ww0 wm Wwi wm
where, the above matrix entries are given in Appendix-C. Since, we are interested in a
nontrivial solution of {u0 }, Equation-(5.28) suggests that [W ] should be singular, i.e.,
the determinant of [W ] must be equal to zero. This condition gives rise to a polynomial
equation in k, which must be solved as a function of ωn . This equation is called the
spectrum relation and is of the form
2(T n)
Qi+1 k i = 0 (5.30)
i=0
where T n = (2 + U n + W n). However, we use polynomial (quadratic) eigenvalue problem,
which can solve eigenvalue problem of any order [59]. Here [W ] matrix is expressed as
polynomial of k as
[W ] = [P 2] k 2 + j[P 1] k + [P 0]; 2
[P 0] = ωn [P 0AC ] + [P 0DC ] (5.31)
where, the above matrices are given in Appendix-C. As [P 2], [P 0] are symmetric and
[P 1] is anti-symmetric the roots can be written as ±k1, ±k2, ±k3... etc. Variation of
these roots with ωn is discussed in Section-5.4.1.3 for a particular material distribution.
Once the variation of the wave numbers with frequency is known, the variation of group
velocities, defined as dω/dR(ki ), can be computed numerically, where R denotes the real
part of a complex number. The variation of the group velocities with frequency is called
the dispersion relation and is an important parameter in wave propagation analysis. In
the following example, we take a higher order beam and analyze it for its spectrum and
dispersion relation and thereby draw several important conclusions.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-202-320.jpg)
![5.3. Spectral Finite Element Formulation of Beam 175
5.3.1 Closed Form Solution for Cut-off Frequencies
Cut-off frequency is a frequency at which the wavenumber is zero. Since the propagating
modes appear only when the loading frequency exceeds the cut-off frequency, the variation
of the latter is important for the response prediction. Explicit forms of the cut-off fre-
quencies can be obtained from the spectrum relation. Substituting k = 0 in the spectrum
relation and solving for ω 2 , the nontrivial roots can be identified. Cut-Off frequencies
for FSDT and FSDT with poison contraction are given in Equation-(5.32). It is to be
noted that the expression of first shear cut-off frequency is lower compare to the of first
contraction mode. The expressions for both cut-off frequency is given by
[0] [0] 2 √ √
I0 A55 Aµ +A15e
11 (aae − abe )I0 (aae + abe )I0
(5.32)
0 0 0 0 2Is Aµ 2Is Aµ
Aµ Is
11
11 11
where
Is = I0 I2 − I1 2 (5.33)
[0] 2 [0] [0] [0] 2
aae = A15e + A55 Aµ + A33 Aµ + A13e
11 11
[0] 4 [0] 2 [0] [0] 2 [0] [0] 2 [0] 2 [0] 2
abe = A15e + 2A15e A55 Aµ − 2A15e A33 Aµ + 2A15e A13e + A55 Aµ 2
11 11 11
[0] µ 2 [0] [0] µ [0] 2 [0] 2 µ 2 [0] µ [0] 2 [0] 4
−2A55 A11 A33 − 2A55 A11 A13e + A33 A11 + 2A33 A11 A13e + A13e .
Note that in the absence of e13 and e15 , cut-off frequency is not dependent on coupling of
the magneto-mechanical effects. For this case, the cut-off frequencies are:
[0]
I0A55 I0A33
0 0 Is 0 0 I0A55 (5.34)
Is Is
Cut-off frequencies for U n = 1, W n = 2 are
√ √
I0A55 aa + ab aa − ab
0 0 Is 2Ia 2Ia
(5.35)
Cut-off frequencies for U n = 2, W n = 1 are
[0] √ √
I0 A33 ba + bb ba − bb
0 0 Is 2Ib 2Ib
(5.36)
Cut-off frequencies for U n = 2, W n = 2 are
√ √ √ √
ca + cb ca − cb da + db da − db
0 0 2Ic 2Ic 2Ic 2Ic
(5.37)
where expression for Is , Ia , Ib , Ic , aa , ab , ba , bb , ca , da , cb , db are given in Appendix-C. Expres-
sions of cut-off frequencies for higher order modes and lengthy. So, numerical values of
cut-off frequencies for higher order modes are discussed in Section-5.4.1.2](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-203-320.jpg)
![176 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
5.3.2 Finite Length Element
The displacement field for the two-nodded finite length element will have (T n) forward
moving and (T n) backward moving (reflected) components. Hence, the displacement
field will contain 2(T n) constants. They need to be determined from 2(T n) boundary
conditions coming from the two nodes. The displacement at any point x(x ∈ [0, L]) and
at frequency ωn becomes
u0
¯ Ru0
u1
¯
Ru1 −jk x
.. e 1
.. 0 .. 0
0
u¯ n RuU n e−jk2 x .. 0
{u}n = U
= {a}n ; (5.38)
w0
¯ Rw0 ..
.. .. ..
w1
¯
Rw1
0 0 .. e −jk2T n x
..
..
wW n
¯ RwW n
where
Ru0 = [R(1)(1) R(1)(2) ... R(1)(2T n) ]
Ru1 = [R(2)(1) R(2)(2) ... R(2)(2T n) ]
...
RuU n = [R(U n+1)(1) R(U n+1)(2) ... R(U n+1)(2T n) ]
Rw0 = [R(U n+2)(1) R(U n+2)(2) ... R(U n+2)(2T n) ]
Rw1 = [R(U n+3)(1) R(U n+3)(2) ... R(U n+3)(2T n) ]
...
RwW n = [R(T n)(1) R(T n)(2) ... R(T n)(2T n) ] (5.39)
The above equation in concise form can be written as
{u}n = [R]n [D(x)]n {a}n , (5.40)
where [D(x)]n is a diagonal matrix of size [2T nX2T n] whose ith element is ejki x . [R]n
is the amplitude ratio matrix and is of size [T nX2T n]. This matrix needs to be known
beforehand for subsequent element formulation. There are several ways to compute the
elements of this matrix. Before any computation, we should understand an important
property of the columns of [R]n if the ith column is denoted by {Ri }, then elements
of {Ri } are the coefficients of the solution corresponding to the wavenumber ki , which](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-204-320.jpg)
![5.3. Spectral Finite Element Formulation of Beam 177
amounts to saying that Ri e−jki x is a solution of the governing equation. Hence, we have
the relation
[W (ki )]{Ri }e−jki x = 0, i.e., [W (ki )]{Ri } = 0. (5.41)
Equation-(5.41) is the governing equation for solving {Ri }. For nontrivial {Ri }, [W (ki )]
needs to be singular, which it is if ki is a solution of the spectrum relation. Unknown
constants {a}n are expressed in terms of the nodal displacements by evaluating Equation-
(5.40) at the two nodes, i.e. at x = 0 and x = L. In doing so, we get
{u}n = {u1 u2 }n = [T1 ]n {a}n , {a}n = [T1 ]−1 {u}n .
n (5.42)
where u1 and u2 are the nodal displacements of node 1 and node 2, respectively. Using
the force boundary conditions (Equation-(5.23)), the force vector {f }n can be written in
terms of the unknown constants {a}n as
∂{u}n
{f }n = {Nx ... Nx n]
[0] [U
Vx[0] ... Vx[W n] }T = [Q0]{u}n + [Q1]
n
∂x
∂[D(x)]n
= [Q0][R]n [D(x)]n + [Q1][R]n {a}n = [P ]n {a}n
∂x
where nonzero entries of [Q0] and Q1 are given in Appendix-C. When the force vector is
evaluated at node 1 and node 2, nodal force vectors are obtained and can be related to
{an }n as
{f }n = {f1 f2 }n = [P (0) P (L)]n {a}n = [T2 ]n {a}n . (5.43)
Equations-(5.42) and (5.43) together yield the relation between the nodal force and nodal
displacement vector at frequency ωn as
{f }n = [T2 ]n [T1 ]−1 {u}n = [K]n {u}n .
n (5.44)
where [K]n is the dynamic stiffness matrix at frequency ωn of dimension [2T nX2T n].
5.3.3 Semi-Infinite or Throw-Off Element
Throw-off element is a one noded non-resonant beam. For the infinite length element,
only the forward propagating modes are considered. The displacement field (at frequency
ωn ) becomes
Tn
{u}n = Rn e−jkmn x an = [R]n [D(x)]n {a}n ,
m
m (5.45)
m=1](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-205-320.jpg)
![178 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
where [R]n and [D(x)]n are now of size [(T n)X(T n)]. {a}n is a vector of (Tn) unknown
constants. Evaluating the above expression at node 1 (x = 0), nodal displacements are
related to these constants through the matrix [T1 ] as
{u1 }n = [R]n [D(0)]n {a}n = [T1 ]n {a}n , (5.46)
where [T1 ] is now a matrix of dimension [(T n)X(T n)]. Similarly, the nodal forces at node
1 can be related to the unknown constants as
{f1 }n = [P (0)]n {a}n = [T2 ]n {a}n , (5.47)
Using Equation-(5.46) and (5.47), nodal forces at node 1 are related to the nodal dis-
placements at node
{f1 }n = [T2 ]n [T1 ]−1 {u}n = [K]n {u}n ,
n (5.48)
where [K]n is the element dynamic stiffness matrix of dimension [(T n)X(T n)] at frequency
ωn . It is usually complex. It is to be noted, such an element cannot be formulated in
conventional finite element formulation.
5.3.4 Effect of the Temperature Field
As shown before in Equations-(5.19-5.22, 5.23), due to the temperature field both body
force and nodal forces are generated. For the finite length element, the nodal force vector
and body force vector due to the temperature field are
n [0] [U n] [0] [W n]
fnT = {−NnT ... − NnT − VnT ... − VnT
[0] [U n] [0] [W n]
NnT ... NnT VnT ... VnT }.
[0] [U n] [0] [W n]
{bT } = {NbT ... NbT VbT ... VbT }. (5.49)
The equivalent nodal force due to this body force can be obtained by applying the varia-
n
tional principle in the frequency domain [108], which yields the load vector fbT
L
n
fbT = [N ]T {bT }dx,
n [N ]n = [R]n [D(x)]n [T1 ]−1 ,
n (5.50)
0
where [N ]n is the shape function matrix at frequency ωn , which can be obtained by
combining Equations (5.40) and (5.42).
Now integrating over the length of the element this force becomes,
fbT = [R]n [D−1 (x)]n [T1 ]−1 {bT }.
n
n (5.51)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-206-320.jpg)
![5.3. Spectral Finite Element Formulation of Beam 179
where
L
[D−1 (x)]n = [D(x)]n dx (5.52)
0
Diagonal terms of the above diagonal matrix can be written as
L
ejki L − 1
ejki x dx = [ki = 0]
0 jki
= L [ki = 0] (5.53)
5.3.5 Effect of the Actuation Current
Similar to temperature field, due to the actuation current, both body force and nodal
forces are generated. For the finite length element, the nodal force vector and body force
vector due to the actuation current are
n [0] [U n] [0] [W n]
fnI = {−NnI ... − NnI − VnI ... − VnI
[0] [U n] [0] [W n]
NnI ... NnI VnI ... VnI }
[0] [U n] [0] [W n]
{bI } = {NbI ... NbI VbI ... VbI }. (5.54)
Similar to temperature field, the equivalent nodal lode due to this body force can be
obtained by applying the variational principle in the frequency domain, which yields the
n
load vector fbI
L
n
fbI = [N ]T {bI }dx = [R]n [D−1 (x)]n [T1 ]−1 {bI }.
n n (5.55)
0
5.3.6 Solution in the Frequency Domain
The equilibrium equation at the nth frequency step becomes
{f }n − {f }n − {f }n − {f }n − {f }n = [K]n {u}n
nT bT nI bI (5.56)
This equation is solved for each frequency and nodal values of mechanical degrees freedoms
are obtained. From these nodal displacements, velocities, accelerations, strains, strain
rates, stresses, stress rates, magnetic fields, magnetic flux densities and sensor open circuit
voltages can be calculated for each frequency in following manner:
5.3.6.1 Strain Computation
The expressions of strain can be found using Equations-(5.40) and (5.42) for the finite
length element and similar expressions for the infinite length element. Using Equation](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-207-320.jpg)
![180 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
(5.3) along with the previous equations, the strains at a point (x, z) of an element can be
related to the nodal displacements of that element as
Un
ε¯ =
xx [Ru0 ] + z i [Rui ] [D1 (x)]n {a}n − α(∆T ),
i=1
Wn
ε¯ =
zz iz i−1 [Rwi ] [D(x)]n {a}n − α(∆T ), (5.57)
i=1
Un Wn
i−1
ε¯ =
xz iz [Rui ] [D(x)]n + [Rw0 ] + z i [Rwi ] [D1 (x)]n {a}n ,
i=1 i=1
where
∂
[D1 (x)]n = [D(x)]n .
∂x
In matrix form, the above equations can be written as
{ε} = ([B0 ][D(x)] + [B1 ][D1 (x)]) [T1 ]−1 {u} − {ε}T , (5.58)
where
Un
0 [Ru0 ] + i=1 z i [Rui ]
Wn
[B0 ] = i=1 iz
i−1
[Rwi ] , [B1 ] = 0 . (5.59)
Un i−1 Wn i
i=1 iz [Rui ] [Rw0 ] + i=1 z [Rwi ]
where {ε}T is the strain due to temperature whose elements are α(∆T ){1 1 0}. It is to
be noted that the above expressions are to be evaluated at each frequency ωn .
5.3.6.2 Magnetic Field Calculation.
Magnetic field can be calculated from Equation-(5.17) as
¯ 1
H=− [[BH0 ][D(x)] + [BH1 ][D1 (x)]] [T1 ]−1 {u} − {H}I − {H}T , (5.60)
Aµ
where
Wn Un
[i−1] [i−1]
[BH0 ] = iA13e [Rwi ] + iA15e [Rui ],
i=1 i=1
Un Wn
[0] [i] [0] [i]
[BH1 ] = A11e [Ru0 ] + A11e [Rui ] + A15e [Rw0 ] + A15e [Rwi ]
i=1 i=1
[HI ] = −InAσ ,
µ [HT ] = −(A11eα + A13eα )(∆T )](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-208-320.jpg)
![5.3. Spectral Finite Element Formulation of Beam 181
5.3.6.3 Stress and Magnetic Flux Density Calculation.
The constitutive relationship given in Equation-(2.9) can now be used to compute the
stresses and magnetic flux density.
σ ¯
{¯ } = [Q]{¯} − [e]T {H} = ([σ0 ][D(x)] + [σ1 ][D1 (x)]) [T1 ]−1 {u} + {σ}T + {σ}I , (5.61)
¯ ¯
{B} = [e]{¯} + [µ ]{H} = ([B0 ][D(x)] + [B1 ][D1 (x)]) [T1 ]−1 {u} + {B}T + {B}I , (5.62)
where
1 T 1 T
[σ0 ] = [Q][B0 ] + [e] [BH0 ], [σ1 ] = [Q][B1 ] + [e] [BH1 ],
Aµ Aµ
1 T 1 T
[σI ] = − [e] {H}I , [σT ] = −[Q]{ }T − [e] {H}T .
Aµ Aµ
1 1
[B0 ] = [e][B0 ] − [µ ][BH0 ], [B1 ] = [e][B1 ] − [µ ][BH1 ],
Aµ Aµ
1 1
[BI ] = [µ ]{H}I , [BT ] = −[e]{ }T + [µ ]{H}T .
Aµ Aµ
It is to be noted that the above expressions are to be evaluated at each frequency ωn .
5.3.6.4 Computation of Sensor Open Circuit Voltage.
The open circuit voltage in the sensor for each frequency can be calculated from Equation-
(3.33) as:
¯ ∂ σ¯
V = ns {lc }T {µ H}dv (5.63)
v ∂t
ns A p
= (jωn )[µσ ] ([BH0 ][D−1 (x)] + [BH1 ][D(x)]) [T1 ]−1 {u}
Aµ
where Ap is cross sectional area of the magnetostrictive patch p.
5.3.6.5 Time Derivatives of any Variable.
Time derivatives of any variable can be expressed by multiplying with −jωn with the vari-
able in the corresponding frequency. Hence, velocity and acceleration for each frequency
can be obtained from displacement as
{u}n = −jωn {u}n
˙ {¨}n = (−jωn )2 {u}n
u (5.64)](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-209-320.jpg)
![182 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Table 5.1: First 10 natural frequencies for 010 and 05 /905 layup using 2D FEM
010 337 1938 4853 5316 8382 12239 15985 16202 20270 24300
05 /905 157 948 2502 3856 4582 6897 9375 11278 12077 14220
5.4 Numerical Results and Discussion
In this section, numerical experiments are performed to get sensor response history from
the mechanical loading and vice versa in spectral domain. First, the different orders of
elements are used to model a composite cantilever beam subjected to tip vertical load
(shown in Figure-4.1), and the response histories are compared to show the need for
higher order spectral elements for high frequency loading. Next, the formulated spectral
element is used for reconstruction of impact force from sensor response histories of the
structure, which is also called force identification problem. For numerical computation,
total thickness of the laminate is considered as 50mm in ten layers. Different types of layup
sequences ([010 ], [05 /905 ], [m/04 /904 /m]) are considered for numerical analysis. Where m
stands for magnetostrictive layer. Length of the beam is considered as 0.5m. For lay up
of [010 ], 10 unidirectional layup is considered of each 5mm thick. In [m/04 /904 /m] layup
sequence, top and bottom layers are made up of magnetostrictive materials each of 5mm
thick. In between, there are eight composite layer of total 40mm thickness with top 4
layers of 0 degree and bottom 4 layers of 90 degree ply sequences. The material properties
of magnetostrictive materials are assumed as E = 30GPa, = 9250kg/m3 , while those
of composite are E1 = 180GPa, E2 = 10.3GPa, G12 = 28GPa and = 1600kg/m3 ,
respectively.
5.4.1 Free Vibration and Wave Response Analysis
Various studies are performed to demonstrate the requirement of higher order elements for
high frequency loading. First, free vibration study is performed to show the errors in first
10 natural frequencies of the cantilever beam with different beam theory assumptions.
Then, cut off frequencies, spectrum relations and dispersion relations of the beam are
discussed in the context of different beam theory assumptions. Finally, responses for
modulated and impulse forces are studied using the formulated spectral elements.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-210-320.jpg)
![5.4. Numerical Results and Discussion 183
[0 ] Wn=Un−2
7 10
Wn=Un−1
Wn=Un
% Error in First 10 Natural Frequencies.
6 Wn=Un+1
Wn=Un+2
5 0.6
4 0.4
3 0.2
0
2 4 5
1
0
1 2 3 4 5
Un
(a) 010 Layup
16
[0 /90 ] Wn=Un−2
5 5
Wn=Un−1
14
Wn=Un
% Error in First 10 Natural Frequencies.
Wn=Un+1
12 Wn=Un+2
10
0.4
8
0.2
6
0
4 4 5
2
0
1 2 3 4 5
Un
(b) 05 /905 Layup
Figure 5.1: Error in Natural Frequency for Different Beam Assumptions](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-211-320.jpg)
![184 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
5.4.1.1 Free Vibration Study
Percentage errors of first 10 natural frequencies with different beam theory assumptions
are studied for a symmetric ([010 ]) and an asymmetric ([05 /905 ]) layup sequence and shown
in Figure-5.1, where stiffness and mass matrices are taken from Section-5.2.1. Zoomed
results for U n = 4 and 5 are also shown in the inset of the figures. Frequencies obtained
from 2D analysis is taken as baseline and shown in Table-5.1. FE analysis is performed
with 500X40 numbers of 2D plane strain elements. For symmetric layup sequence ([010 ]),
results with first (U n = 1) and second (U n = 2) order, and for third (U n = 3) and
fourth (U n = 4) order shear deformable assumption gives similar results. Similarly for
asymmetric layup sequence ([05 /905 ]), results with second (U n = 2) and third (U n = 3)
order and fourth (U n = 4) and fifth (U n = 5) order shear deformable assumption gives
similar results.
For [010 ] layup sequence (Figure-5.1(a)), first (U n = 1) and second (U n = 2) order
shear deformable assumptions give 7% error. Third order (U n = 3) shear deformable
beam with one contraction mode (W n = 1) gives 1.8% error. However, with the inclusion
of two or more contraction modes gives results that have 0.5% error. For [05 /905 ] layup
sequence (Figure-5.1(b)), first order (U n = 1) shear deformable assumptions give 15%
error, which is quite high. Second order shear deformable beam (U n = 2) with one
contraction mode (W n = 1) gives 10% error. Second (U n = 2) and third (U n = 3)
order shear deformable beam with two or more contraction modes (W n > 1) gives results
that has 5% error. Fourth order shear deformable beam (U n = 4) with second order
contraction mode (W n = 2) shows 2.5% error. Fourth and fifth order shear deformable
beam with higher order contraction shows 0.4% and 0.2% error respectively (inset of the
figure). This study clearly demonstrates the need for higher order theories for accurate
response estimation.
5.4.1.2 Cut-Off Frequencies of Beam.
In this example, the wavenumber variations are plotted for different orders. Closed form
solution of the cut-off frequencies for FSDT and FSDT with contraction effect beam
theories is given in Section-5.3.1. These closed form solutions for higher order theories are
lengthy. Hence, the numerically obtained values are used in these studies. Figure-5.2 and
Figure-5.3 show the cut-off frequencies for fifth order shear deformable (U n = 5) beam
with varying contraction mode and fifth order contraction mode (W n = 5) with varying
shear deformable beam assumptions. Figure-5.2(a) and Figure-5.3(a) show the cut-off](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-212-320.jpg)
![5.4. Numerical Results and Discussion 185
6
10
Shear
Contraction
Cut−Off Frequencies (Hz)
5
10
[0 ] Wn=5
10
4
10
0 2 4 6 8 10
Un
(a) W n = 5
6
10
Contraction
Shear
Cut−Off Frequencies (Hz)
5
10
[010] Un=5
4
10
0 2 4 6 8 10
Wn
(b) U n = 5
Figure 5.2: Cut-Off Frequencies for [010 ] Layup with different beam assumptions.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-213-320.jpg)
![186 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
6
10
Shear [m/04/904/m]; Wn=5
Contraction
Cut−Off Frequencies (Hz)
5
10
4
10
0 2 4 6 8 10
Un
(a) W n = 5
6
10
Contraction [m/04/904/m]; Un=5
Shear
Cut−Off Frequencies (Hz)
5
10
4
10
0 2 4 6 8 10
Wn
(b) U n = 5
Figure 5.3: Cut-Off Frequencies for [m/04 /904 /m] layup with different beam assumptions.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-214-320.jpg)
![5.4. Numerical Results and Discussion 187
frequencies for the [010 ] and [m/04 /904 /m] lay up sequences respectively. For both the
cases, we have five contraction cut-off frequencies and 0 to 10 numbers of shear cut-off
frequencies depending upon the beam theory assumption. Observations from these figures
are as follows:
• The figure shows that first contraction cut-off frequency is below the first shear
cut-off frequency. It shows the importance of consideration of contraction mode in
the analysis.
• If the loading frequency is 100kHz (say), at least three contraction modes with three
shear modes for [m/04 /904 /m] lay up sequence and three contraction modes with two
shear modes for [010 ] lay up sequence should be considered in the dynamic analysis.
Classical beam theory is sufficient for [010 ] and [m/04 /904 /m] layup sequences up
to loading frequency of 20, and 10 kHz respectively.
• Contraction mode cut off frequencies are nearly constant irrespective of assumption
on the shear deformation.
• Shear cut-off frequencies follow a particular pattern when the order of shear defor-
mation assumption is two more than the corresponding shear mode. For example,
first shear cut-off frequency is same for U n = 1 and U n = 2. For U n = 3, this value
is little less than previous. This value is again constant for U n = 3 and onwards.
Figure-5.2(b) and Figure-5.3(b) shows the cut-off frequencies for [010 ] and [m/04 /904 /m]
lay up sequences considering U n = 5 and varying W n from 0 to 10 respectively. For
both the cases we have five shear cut-off frequencies and 0 to 10 numbers of contraction
cut-off frequencies depending upon the assumption. Observations from these figures are
as follows:
• Figure shows that the first contraction cut-off frequency is below the first shear cut-
off frequency. Again, it shows the importance of inclusion of lateral contractions in
the analysis.
• If the loading frequency is 100kHz (say), at least three contraction modes with three
shear modes for [m/04 /904 /m] lay up sequence and three contraction modes with two
shear modes for [010 ] lay up sequence should be considered in the dynamic analysis.
Classical beam theory is sufficient for [010 ] and [m/04 /904 /m] layup sequences up
to loading frequency of 20, and 10 kHz respectively.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-215-320.jpg)
![188 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
• Shear mode cut off frequencies are always constant irrespective of assumption on
the order of contraction.
• Contraction mode cut-off frequencies follow a particular pattern when the order of
contraction assumption is two more than the corresponding contraction mode. For
example, first contraction cut-off frequency is same for W n = 1 and W n = 2. For
for W n = 3, this value is little less than previous. This value is again constant for
W n = 3 and onwards.
5.4.1.3 The Spectrum and Dispersion Relation
Spectrum and Dispersion relation indicate the nature of waves that is, dispersive or non-
dispersive. These relations are derived independent of the boundary condition of the
structure. However, they depend on the material properties. If the loading is ”monochro-
matic” (i.e., it contains a single frequency), the dispersion relation can be used to predict
the response especially for highly dispersive waves. Axial, bending, shear and contraction
wavenumbers, can be identified from the dispersion relationships. The wavenumbers plot-
ted in the negative side of the ordinate denote the imaginary part of the wavenumbers
(damping mode)[59, 60, 61, 62, 63, 64]. The frequencies where the imaginary wavenumbers
become real are called the cut-off frequencies. It is important to note that there are prop-
agating axial and bending modes for all frequencies, whereas the shear and contraction
mode appear only when the frequency exceeds the respective cut-off frequencies.
Figure-5.4 and Figure-5.5 show the spectrum relationships and group speeds for
[010 ] layup sequences with different beam theory assumptions. Figure-5.4(a) shows the
spectrum relationships for fourth order shear deformable beam assumption with first
order contraction mode (U n = 4, W n = 1). Hence, four shear cut-off frequencies and one
contraction cut-off frequency are shown in the figure. Figure-5.4(c) shows the spectrum
relationships for U n = 1, W n = 4. Hence, one shear cut-off frequency and four contraction
cut-off frequencies are seen in the figure. Figure-5.4(e) shows the spectrum relationships
for fourth order shear deformable beam assumption with fourth order contraction mode
(U n = 4, W n = 4). Hence, four shear cut-off frequencies and four contraction cut-off
frequencies are seen in the figure. Following behavior can be observed from these figures:
• At high frequency, all contraction modes are going near to bending mode and all
shear modes are going to near of axial mode.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-216-320.jpg)
![5.4. Numerical Results and Discussion 189
11
300
10
250
9
200 8
Group Speed (km/sec)
150 7
k (m )
6
−1
100
5
50
4
0 3
−50 2
1
−100
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(a) Spectrum U n = 4, W n = 1 (b) Group Speed U n = 4, W n = 1
300 11
250 10
200 9
150 8
Group Speed (km/sec)
100 7
k (m )
6
−1
50
0 5
−50 4
−100 3
2
−150
1
−200
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(c) Spectrum U n = 1, W n = 4 (d) Group Speed U n = 1, W n = 4
11
300
10
250
9
200
8
150
Group Speed (km/sec)
7
100
k (m )
6
−1
50
5
0
4
−50
3
−100
2
−150
1
−200
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(e) Spectrum U n = 4, W n = 4 (f) Group Speed U n = 4, W n = 4
Figure 5.4: Spectrum Relationships and Group Speeds for [010 ].](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-217-320.jpg)
![190 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
11
300 10
250 9
200 8
Group Speed (km/sec)
150 7
100
k (m−1)
6
50 5
0 4
−50 3
−100 2
−150 1
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(a) Spectrum U n = 7, W n = 6 (b) Group Speed U n = 7, W n = 6
11
300 10
9
200
8
Group Speed (km/sec)
7
100
k (m−1)
6
5
0
4
−100 3
2
−200 1
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(c) Spectrum U n = 8, W n = 7 (d) Group Speed U n = 8, W n = 7
11
300
10
9
200
8
Group Speed (km/sec)
100 7
k (m−1)
6
0
5
−100 4
3
−200 2
1
−300
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(e) Spectrum U n = 9, W n = 8 (f) Group Speed U n = 9, W n = 8
Figure 5.5: Spectrum Relationships and Group Speeds for [010 ].](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-218-320.jpg)
![5.4. Numerical Results and Discussion 191
• Presence of higher mode in the computation alters the spectrum relation and group
speeds of lower modes.
Corresponding dispersion relationship (group speeds) are shown in Figure-5.4(b), Figure-
5.4(d) and Figure-5.4(f). Followings are the observation from these figures:
• Here it is observed that, axial group speed is near 10.5 km/sec and independent of
frequency and order of beam assumption. At very high frequency, all shear modes
tend to attain this velocity.
• Bending group speed start at 0 and attain a maximum value of 4.1 km/sec near
the frequency of 20 kHz. A small amount of reduction in bending group speed is
observed after this frequency due to the presence of higher order contraction mode.
All contraction group speeds tend to attain this value at high frequency limit.
Figure-5.5 shows the spectrum relationships of [010 ] layup sequence for very high
orders of beam theory assumption Figure-5.5(a) and Figure-5.5(b) shows the spectrum
relations and group speeds for seventh order shear deformable beam with six order con-
traction mode. Out of these only three shear cut off frequencies and five contraction cut
off frequencies are observed in the figures. First shear mode group speed is disturbed by
second and fourth contraction mode at their respective cut off frequencies. Figure-5.5(c)
and Figure-5.5(d) shows the spectrum relations and group speeds for eighth order shear
deformable beam with seven order contraction modes. Out of these only four shear cut off
frequencies and five contraction cut off frequencies are observed in the figures. First shear
mode group speed is disturbed by second and fourth contraction modes and second shear
group speed is disturbed by fifth contraction mode at their respective cut off frequencies.
Figure-5.5(e) and Figure-5.5(f) shows the spectrum relations and group speeds for ninth
order shear deformable beam with eight order contraction mode. Out of these only four
shear cut off frequencies and six contraction cut off frequencies are observed in the fig-
ures. First shear mode group speed is disturbed by second, fourth and sixth contraction
modes, second shear group speed is disturbed by fifth contraction mode and third shear
mode is disturbed by sixth contraction mode at their respective cut off frequencies. Axial
or bending group speeds are not disturbed by any shear or contraction modes for this
symmetric layup sequences. Next, the asymmetric lay up sequence is discussed.
Figure-5.6 show the spectrum relationships and group speed for [m/04 /904 /m] layup
sequence. Due to asymmetric layup sequence, axial group speed is not constant through](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-219-320.jpg)
![192 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
7
600
6
400 5
Group Speed (km/sec)
200 4
k (m−1)
3
0
2
−200
1
−400
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(a) Spectrum U n = 5, W n = 1 (b) Group Speed U n = 5, W n = 1
7
600
6
400
5
Group Speed (km/sec)
200
4
k (m−1)
0 3
−200 2
−400 1
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(c) Spectrum U n = 1, W n = 5 (d) Group Speed U n = 1, W n = 5
7
800
6
600
5
Group Speed (km/sec)
400
4
k (m−1)
200
3
0
2
−200
1
−400
0
0 50 100 150 200 20 40 60 80 100 120 140 160 180
Frequency (kHz) Frequency (kHz)
(e) Spectrum U n = 5, W n = 5 (f) Group Speed U n = 5, W n = 5
Figure 5.6: Spectrum Relationships and Group Speeds for [m/04 /904 /m].](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-220-320.jpg)
![5.4. Numerical Results and Discussion 193
out the frequency range unlike the symmetric layup. At zero frequency limits, this is
around 5.1 km/sec and at 30 kHz frequency it comes down up to 1.5 km/sec and again it
increases at high frequency. In addition, axial group speed is disturbed by first contraction
mode in its cut off frequency which is below 20kHz. Figure-5.10(a) shows the group speed
for FSDT formulation. All three (axial, shear and bending) speeds are constant beyond
60 kHz frequency. However, the presence of another shear mode shows (in Figure-5.11(a))
that there is a maximum value of first shear group speed at 40 kHz, which is before the
second shear cut-off frequency. However, the second shear group speed has no such peak
speed. Similarly, In the presence of third shear mode, shown in Figure-5.7(a), second
shear group speed has a maximum value at 80 kHz, which is before the third shear cut-
off frequency. Again as before, the third shear mode is the maximum shear mode, peak
value of the speed is not observed. In the presence of fourth shear mode (shown in
Figure-5.7(b)), third shear group speed has a peak value before the fourth shear cut-off
frequency. This figure is almost matching with the Figure-5.10(a), Figure-5.11(a) and
Figure-5.7(a) up to 20kHz, 40kHz and 60 kHz respectively, and these are the frequency
limits for corresponding beam theory assumptions. In general, it can be concluded that
every shear modes are reaching their maximum values within their cut-off frequency and
next shear mode’s cut-off frequency.
Further, to study the effect of contraction mode on group speeds Figure-5.7(b)
is enhanced with contraction modes. Figure-5.8(a) and Figure-5.8(b) shows the group
speeds for [m/04 /904 /m] layup sequence with assumption of U n = 4, W n = 1 and U n =
4, W n = 4 respectively. Figure-5.8(a) shows four shear mode and one contraction mode.
This contraction mode has changed the bending group speed in the very low frequency
limit. In addition, at first contraction cut off frequency, the axial group speed is disturbed
by the contraction mode. In Figure-5.8(b), a total 10 modes are available (axial, bending,
four shear and four contraction) due to fourth order shear deformable beam assumption
with four contraction modes. Tracking of all the modes are difficult. Figure-5.6(a) and
Figure-5.6(b) show the spectrum relationship and group speed for [m/04 /904 /m] layup
sequence with assumption of U n = 5, W n = 1. Axial group speed is perturbed by the
first contraction mode. Bending mode attains maximum value at 10 kHz frequency. All
the shear modes attain maximum values immediately after their appearance at the cut
off frequencies. First, second, third and fourth shear group speeds attains maximum
values at 38, 75, 142 and 192 kHz respectively. Figure-5.6(c) and Figure-5.6(d) show the
spectrum relationship and group speed for [m/04 /904 /m] layup sequence with assumption](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-221-320.jpg)
![194 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Dispersion Relations
8
7
6
Group Speed (km/sec)
5
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(a) U n = 3, W n = 0
Dispersion Relations
8
7
6
Group Speed (km/sec)
5
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(b) U n = 4, W n = 0
Figure 5.7: Group Speed for [m/04 /904 /m] Layup sequence.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-222-320.jpg)
![5.4. Numerical Results and Discussion 195
Dispersion Relations
7
6
5
Group Speed (km/sec)
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(a) U n = 4, W n = 1
Dispersion Relations
8
7
6
Group Speed (km/sec)
5
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(b) U n = 4, W n = 4
Figure 5.8: Group Speed for [m/04 /904 /m] Layup sequence.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-223-320.jpg)
![196 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
of U n = 1, W n = 5. Here axial group speed is not perturbed by any of the contraction
modes. First shear group speed attains maximum value at 41 kHz. Third and fifth
contraction group speeds are mutually disturbed near 190 kHz frequency. Figure-5.6(e)
and Figure-5.6(f) show the spectrum relationship and group speed for [m/04 /904 /m] layup
sequence with assumption of U n = 5, W n = 5. Axial group speed is perturbed by the
first contraction mode at the cut off frequency. The third shear mode is perturbed by
fifth contraction mode at its cut off frequency.
These studies again prove the requirement of higher order theories for beams at high
frequencies. As the presence of higher order mode perturbs the spectrum and dispersion
relations of lower order modes, one or two order higher beam assumption is essential
than the predicted order from the cut off frequency calculation for true response of the
structure. In the next two sections, this will be demonstrated with a beam subjected to
high frequency tip vertical load.
5.4.1.4 Response to a Modulated Pulse
There are three propagating modes (axial, bending and shear) in FSDT, whereas HSPT
has additional shear and contraction modes along with the FSDT modes. These modes
individually propagate with the group speeds shown in the dispersion relation. If one
wants to study the principal components of the response (i.e., the propagating modes)
individually, then a wide band pulse loading will not be useful due to the dependency
of the speeds on the frequency. Instead, a modulated (monochromatic) pulse will force
each individual mode to travel at its (constant) group speed. If the central frequency
of the modulated pulse is chosen so that all propagating modes occur (this information
can be obtained from the dispersion relation), then all these modes can be captured
graphically if they are allowed to propagate for sufficient length. Having this strategy in
mind, a pulse loading of 150µs duration and modulated at 200kHz (shown in Figure-5.9)
is applied to an infinite beam of [m/04 /904 /m] layup sequence. The beam is impacted at
a point and response is measured at 11 different points of 1m interval from the impact
site. The dispersion relation discussed in Section-5.4.1.3 predicts how many modes are
propagating at these frequencies. For HSPT, the group speeds at 200kHz frequency are
given in different Tables and Figures for different order of beam assumptions in this
section. For the given propagating distance, the time required for each mode to reach
the measuring points are also calculated and shown in the Tables. Group speed values
will be compared to the times of arrival of the responses of the beam. The load is](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-224-320.jpg)

![198 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Dispersion Relations
6
5
Group Speed (km/sec)
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(a) Group Speed
10
8
Location (m)
6
4
2
0
0 1 2 3 4 5 6
Time (sec) x 10
−3
(b) Modulated Pulse Response
Figure 5.10: Group Speed and Modulated Pulse Response for [m/04 /904 /m] Layup with
U n = 1, W n = 0.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-226-320.jpg)

![200 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Dispersion Relations
8
7
6
Group Speed (km/sec)
5
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(a) Group Speed
10
8
Location (m)
6
4
2
0
0 1 2 3 4 5 6
Time (sec) x 10
−3
(b) Modulated Pulse Response
Figure 5.11: Group Speed and Modulated Pulse Response for [m/04 /904 /m] Layup with
U n = 2, W n = 0.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-228-320.jpg)

![202 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
Dispersion Relations
7
6
5
Group Speed (km/sec)
4
3
2
1
0
20 40 60 80 100 120 140 160 180
Frequency (kHz)
(a) Group Speed
10
8
Location (m)
6
4
2
0
0 1 2 3 4 5 6
Time (sec) x 10
−3
(b) Modulated Pulse Response
Figure 5.12: Group Speed and Modulated Pulse Response for [m/04 /904 /m] Layup with
U n = 4, W n = 3.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-230-320.jpg)
![5.4. Numerical Results and Discussion 203
5.4.1.5 Response to a Broad-band Pulse
In earlier section (Section-5.4.1.4), the modulated pulse was used to segregate different
propagating modes using an infinite beam. In this section a cantilever beam is con-
sidered which is subjected to broadband loading of 25 kHz (shown in Figure-5.13(a))
with a symmetric ([010 ]) and an asymmetric ([m/04 /904 /m]) layup sequences. The one-
dimensional spectral model of cantilever beam consists of a single element of one end fixed,
which results in a dynamic system matrix of size [3X3] for FSDT and [(2 + U n + W n)
X (2 + U n + W n)] for U n order of shear deformable with W n order of contraction beam
assumption, which need to be inverted at each frequency step. The force input for the
spectral analysis is triangular pulse sampled at a time step of 0.244µ-sec using 16384 FFT
points. The load is applied vertically at the free end of the beam and the vertical velocity
(of any point on the reference plane, i.e., the mid-depth of the composite layer) at the
same point is measured and plotted in Figure-5.13(b) for [010 ] layup sequence. In this fig-
ure, the peak amplitude at 0.26 milli-sec is the incident part of the pulse. The wave then
propagates towards the fixed end and gets reflected at the boundary and this reflection
appears at around 0.5 milli-sec. As is seen in the figure, the higher order elements have
a difference in the occurrence of reflection from the boundary. This is expected, since the
dispersion relation suggests that the bending speed for FSDT is higher than the other
higher order beam assumptions. In addition, as the shear cut off frequency for [010 ] layup
is beyond 25 kHz and due to symmetric layup sequence, bending-stretching coupling is
absent, only bending mode is propagating for this loading.
Figure-5.14 shows the tip vertical velocity and sensor response histories of a can-
tilever beam with [m/04 /904 /m] layup sequence due to vertical impact load shown in
Figure-5.13(a) at the tip of the cantilever. Figure-5.14(a) shows the cantilever tip ve-
locity for [m/04 /904 /m] layup sequence. Response behavior is seen to be similar to the
previous case. However, there is significant difference in the voltages predicted by different
beam theories. This is shown in Figure-5.14(b).
In this section, mechanical response as well as sensor response histories due to impact
load is studied for a cantilever beam. Some of the observations in Section-5.4.1.3 were
verified here. More importantly, it was found that, increase in the order of beam theory
reduces the effective group speeds. In the next section, impact load will be reconstructed
from the response histories of the sensor, which is called the force identification problem.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-231-320.jpg)

![5.4. Numerical Results and Discussion 205
−5
x 10
15
Un=1, Wn=0
Un=2, Wn=1
Un=3, Wn=2
Un=4, Wn=3
10
Velocity (m/sec)
5
0
0 0.2 0.4 0.6 0.8 1 1.2
Time (sec) x 10
−3
(a) Vertical velocity at Cantilever Tip
0.14 Un=1, Wn=0
Un=2, Wn=1
Un=3, Wn=2
0.12
Un=4, Wn=3
0.1
Open Circuit Voltage (V)
0.08
0.06
0.04
0.02
0
−0.02
0 0.2 0.4 0.6 0.8 1 1.2
Time (sec) x 10
−3
(b) Sensor Open Circuit Voltage history
Figure 5.14: Broadband response of [m/04 /904 /s] layup sequence (s for sensor layer).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-233-320.jpg)
![206 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
5.4.2 Force Identification
Force identification is a class of inverse problem where in, the measured response and
system transfer functions are used to reconstruct the force. This is a very challenging
problem, which can be elegantly handled using the formulated spectral element.
The mechanical force acting on a body cannot be measured directly. If a body is
loaded statically and if the body deforms linear-elastically, the deformation at any point
of the body is proportional to the applied force. Therefore, the variation of the force
can be measured indirectly by measuring the variation of the deformation. However, this
principle cannot be applied when a body is subjected to a dynamic force. In this case,
the propagation of stress waves inside the body should be considered so that the variation
of the deformation at any point of the body is no longer the same as the variation of
the applied force. Hence, dynamic force is much more difficult to measure than static
force. In order to overcome this difficulty, inverse analysis methods to estimate variations
of impact force from measured responses of a body have been studied extensively during
the last two decades. Inoue et al. [166] presented a review of methods of inverse analysis
for the indirect measurement of impact force. Stevens [346] presented an overview of the
force identification process for the case of linear vibration systems, and classified them
into discrete systems and continuous systems.
The measurement of dynamic forces acting on structures or machines is frequently
impossible due to accessibility problems related to transducer placement. A seemingly
simple way to solve this problem is to determine the transfer function of the system,
measure the system vibration, and back-calculate the forces that produced the vibration.
When the FRF matrix describing the dynamical behavior of a structure is available, the
operational loads can be determined by multiplying the pseudo-inverse of the FRF matrix
by the operational responses (displacements, velocities or accelerations). Unfortunately,
the nature of this ”inverse problem” is mathematically ill-conditioned, i.e. small mea-
surement errors lead to large errors in predicted forces. In early papers, Doyle [104, 105]
used a frequency-domain deconvolution technique to estimate the impact force on beams
and plates from strain gauge measurements. The Fast Fourier Transform (FFT) was used
to convert the measured strain history into its frequency components, which were used
to obtain the frequency components of the impact force. Then the Inverse Fast Fourier
Transform (IFFT) was implemented to reconstruct the impact force history in the time-
domain. Doyle [106] demonstrated the reconstruction of impact force of a two-dimensional
bimaterial beam system. In another paper, Doyle [107] introduced a computationally ef-](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-234-320.jpg)
![5.4. Numerical Results and Discussion 207
ficient deconvolution method with similarities to Fourier analysis and wavelet analysis for
force reconstructions using measured acceleration responses from beam and plate models.
Martin and Doyle [254] used a frequency domain deconvolution method to clarify some
of the fundamental difficulties and issues involved in the inverse problem of solving for
the impact force history using experimentally measured structural responses. Recently,
Adams and Doyle [5] presented a method for determining force histories using experi-
mentally measured responses which can determine multiple isolated (uncorrelated) force
histories as well as distributed pressures and tractions and allows for the data collected
being of dissimilar type. As a demonstration of the method and of its scalability, force
reconstructions for an impacted shell and an impacted plate were determined using ac-
celerometer and strain gage data. Chakraborty and Gopalakrishnan [61] used spectral
finite element to reconstruct the force history applied to a functionally graded material.
Mitra and Gopalakrishnan [271] used spectrally formulated wavelet finite element for
impact force identification in connected 1-D waveguides.
Instead of obtaining the impact force history through the direct deconvolution pro-
cess of a convolutional integral, Wu et al. [405, 406] developed a constrained optimization
technique to detect the impact force history exerted on a laminated composite plate from
the recorded strain responses. A Green’s function was constructed based on the classical
lamination theory and the model superposition method to correlate the laminate response
to the impact force. To obtain the impact force histories exerted at multiple locations on
the laminate, a constrained optimization method is employed. Chang and Sun [70], on
the other hand, used experimentally generated Green’s functions and time-domain decon-
volutions to estimate the impact force history from strain measurements. A least-square
fit method was used in their numerical scheme. However, the amplitudes of the Green’s
functions had to be scaled to account for different impactor characteristics. Hollandsworth
and Busby [159] used experimental measurement data to describe the velocity response
of an impacted cantilever beam to the problem of impact force identification. A spectrum
analyzer was used to measure the beam accelerations within 40 µ-sec time intervals and
the accelerations were integrated for velocity in the inverse algorithm. Predicted impact
force given by the inverse technique was compared with actual dynamic load of impact
hammer. Wu et al. [404] presented two methods for the purpose of detecting the impact
force history. In the first method, the classical plate theory, and the normal-mode super-
position method using Bessel functions were used to construct Green’s functions in the
time-domain. A constrained optimization technique was used to reconstruct the impact](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-235-320.jpg)
![208 Chapter 5. Spectral FE Analysis with Magnetostrictive Patches
force history from measured strain histories. This method was limited to axisymmet-
ric impact problems because of the restriction of the Green’s functions. In the second
method, the impact force history was reconstructed using the gradient projection method
by comparing the response to recorded force and strain histories of a controlled impact.
Tsai et al. [373] also used a Green’s function approach to estimate impact force from
experimental data on sandwich panels. Huang et al. [163] described an inverse technique
for the prediction of impact forces from acceleration measurements on a vibratory ball mill
with a method based on an optimization approach. Yang [413] used linear least-squares
method to estimate the force on one end of a bar in the one-dimensional inverse vibration
problem. Finite-difference method was employed to discretize the problem domain, and
then a linear inverse model is constructed to identify the force condition. Briggs and
Tse [48] proposed a technique to determine the magnitude and location of impact forces
on a structure from extracted modal constants and a pattern matching procedure. Ma
et al. [239] presented an on-line recursive inverse method to estimate the input forces
of beam structures based on the Kalman filter and a recursive least-squares algorithm.
In the numerical experiments, the cantilever beam was subjected to five types of input
forces, i.e., sinusoidal, triangular impulse, rectangular impulse, a series of impulses and
random. In another paper, Ma and Ho [240] proposed an inverse method to identify in-
put forces of non-linear structural systems using extended Kalman filter and a recursive
least-squares estimator. Flores et al. [122] presented an inverse procedure for the deter-
mination of external loads, given the dynamic responses of the loaded structure and its
corresponding finite element model using particle swarm optimization together with the
Lagrange-Newton sequential quadratic programming method. Cruz et al. [92] presented
a nonlinear least-square method for determining the location and magnitude of a static
point force acting on a plate from a number of displacement readings at discrete points on
the plate. Chock and Kapania [80] identified the loads on the finite element model that
would create equivalent displacements or stresses by various means, thus saving a large
amount of computational effort using methods based on classical least-squares methods.
Christoforou et al. [87] presented an inverse model for estimation of the mass and ve-
locity of the impactor in low-velocity impact of composite plates using a least-squares
optimization technique for optimal reconstruction of the force-time history. Odeen and
Lundberg [295] established a method which permits prediction of impact force history
from the velocity response of each impacting body to an impulsive force applied to its
impact face, and the impact velocity.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-236-320.jpg)
![5.4. Numerical Results and Discussion 209
Force identification from dynamic responses of bridges is an important inverse prob-
lem. The parameters of both the vehicle and the bridge play an important role in the
force identification. Based on the bending moments measured in the laboratory, Chan
et al. [69] developed four different identification methods in the moving force identifica-
tion system of the bridges. Law and Fang [211] applied dynamic programming technique
for moving forces identification. Busby and Trujillo [51] estimated the unknown forcing
function using an eigenvalue reduction technique, in conjunction with inverse dynamic
programming. They showed that the input force history can be reconstructed by solving
a dynamic inverse problem. Hollandsworth and Busby [159] used acceleration measure-
ments to identify the impact force on aluminum beams by solving a dynamic inverse
problem experimentally. In the experiment, the load was applied at a known position and
accelerometers were used as sensors. For an unknown loading point, Cruz et al. [92] for-
mulated a nonlinear inverse problem and tried to find the location and magnitude of the
external force. The force, however, was not general but confined to a sinusoidal function
whose amplitude and phase are the only parameters to be found.
With the advent of smart structure technology, Choi and Chang [82] proposed
an impact load identification method using distributed built-in piezoelectric sensors for
detecting foreign object impact. Their identification process consisted of a system model
and a response comparator, employing a quasi-Newton procedure to estimate the location
of impact, and the least-square fit method to predict the force history. Lihua and Baoqi
[228] used neural networks and piezoelectric sensors to identify the location and amplitude
of a static force on a square plate.
In the earlier section (Section-5.4.1.5), the relation between force histories and open
circuit voltages in sensor was formulated based on the spectral finite element method for
a broadband impact event. The sensor responses are described as a product of transpose
matrix and force histories. In this section, from open circuit voltage histories of magne-
tostrictive sensor, impacted force histories in a laminated composite beam is identified
using spectral finite element formulation.
Inherent advantage of the spectral element in the solution of inverse problems is
utilized here to reconstruct the force history applied to a composite beam. In the absence
of experimental data, truncated sensor response histories are used as surrogate experi-
mental responses. These truncated responses are given as input to spectral element solver
and the force data are reconstructed by performing inverse analysis. Since, experimental
outputs are always truncated at some point depending upon constraints of the setup,](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-237-320.jpg)

![5.4. Numerical Results and Discussion 211
0.1 4 mili−sec
0.05
Open Circuit Voltage (V)
0
0 0.5 1 1.5 2 2.5 3 3.5 4
0.1 2 mili−sec
0.05
0
0 0.5 1 1.5 2 2.5 3 3.5 4
0.1 1 mili−sec
0.05
0
0 0.5 1 1.5 2 2.5 3 3.5 4
0.1 500 µ−sec
0.05
0
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (mili−sec)
(a) Sensor Response truncated at several points
1
4 mili−sec
0.5
Reconstructed Force (N)
0
0 0.5 1 1.5 2 2.5 3 3.5 4
1
2 mili−sec
0.5
0
0 0.5 1 1.5 2 2.5 3 3.5 4
1
1 mili−sec
0.5
0
−0.5
0 0.5 1 1.5 2 2.5 3 3.5 4
1
500 µ−sec
0.5
0
−0.5
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (mili−sec)
(b) Reconstructed Force history from several truncated sensor responses
Figure 5.15: 25 kHz Broadband Force Reconstruction for [m/04 /904 /m] layup.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-239-320.jpg)

![Chapter 6
Forward SHM for Delamination
6.1 Introduction
Composite is changing the world of structural construction due to its various technological
advantages. However, these new materials also have some problems such as fiber breakage,
matrix cracking, and delamination. Matrix cracks and fiber breakages play an important
role in laminates under tensile load. But, the primary concern with polymer composites is
the delamination failure, which is debonding of adjacent plies, since the through-thickness
properties of composite laminates are typically matrix dominated and therefore, much
weaker than the fiber dominated in-plane properties. In industry, one of the commonly
encountered types of defect or damage in laminated composite structures is delamination.
Delamination often occur at stress free edges due to the mismatch of properties at ply
interfaces and it can also be generated by external forces such as out of plane loading or
impact during the service life. While such impact can cause a number of delaminations, a
small surface indentation is the only external indication since the delaminations are cracks
in the interior of the laminate. Thus, this type of damage is often called barely visible
impact damage, which is not readily identified by visual inspection. This problem is
caused from the fact that transverse tensile and interlaminar shear strength of composite
laminates are quite low in contrast to their in-plane properties. Inter layer debonding or
delamination is a prevalent form of damage phenomenon in laminated composites. It may
be formed due to a wide variety of foreign object impact damage, poor fabrication process,
and fatigue from environmental cycling. Delaminations cause a reduction in the stiffness
of the structure thus affecting its vibration characteristics. They also substantially reduce
the buckling load capacity, which, in turn, influences the stability characteristics of the
structure. Hence, delamination is the critical parameter for laminates under compression
and one of the most common failure modes in composite laminates. Kim et al. [183]
213](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-241-320.jpg)
![214 Chapter 6. Forward SHM for Delamination
had studied the effects of delaminations in composite plate. Delamination of composite
laminate had been studied in structural health monitoring context by many researchers
[72, 234, 247, 285, 332, 348, 350, 352, 370, 418].
In this chapter, numerical simulation are carried out for a delaminated composite
laminate with or without magnetostrictive patches as sensors and actuators using anhys-
teretic, coupled, linear properties of magnetostrictive materials. Effect of delamination in
cantilever tip velocity and sensor open circuit voltages are studied. Single and multiple
delaminations are studied with tip vertical impact load and biased sinusoidal current in
actuator coil. The presence of delamination, changes the stress response of the struc-
ture. This in turn changes the magnetic flux density of the magnetostrictive sensor. The
changes in the flux density are sensed through a sensing coil as open circuit voltage. Mea-
surement of open circuit voltage before and after the damage (delamination) occurrence
provides a diagnostic measure to indicate the presence of the damage.
This chapter is organized as follows. First the modelling of delamination consid-
ering beam and 2D plane stress formulation is studied and compared for both static tip
deflection and natural frequencies of a cantilever beam. Then the tip deflection histories,
due to tip vertical load on a delaminated cantilever beam are studied for different size and
location of delamination. Next, due to the same tip load, sensor open circuit voltages are
studied for different delamination configurations. To study the effect of location of sensor
in response histories, one delaminated portal frame is studied with different locations of
sensors with a fixed location of delamination and actuator. Although beam assumption
reduces the computational cost, it introduces the errors from its inherent assumption.
The relative importance between the errors due to different beam assumptions and the
sensitivity of the delamination for both thick and thin portal frame is studied. Finally,
the effect of different delamination configuration on tip deflection and sensor response due
to actuation in two different frequencies are studied. The chapter is then concluded with
a brief summary.
6.2 Delamination Modelling in Composite Laminate
Many stiffness and modulus degradation models have been proposed in the literature
for finite element modelling of damage, which is not suitable for modelling of delamina-
tion in composite structure. Literature for modelling of delamination is discussed in the
introductory chapter of Section-1.2.5.2.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-242-320.jpg)
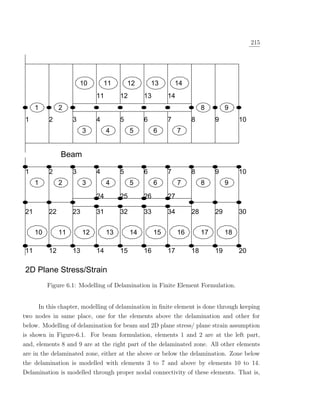




![220 Chapter 6. Forward SHM for Delamination
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.4: 100mm Delamination at Mid Layer and Different Distance from Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-248-320.jpg)
![6.3. Numerical Example 221
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.5: 20mm Delamination at Mid Layer and Different Distance from Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-249-320.jpg)

![6.3. Numerical Example 223
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.6: Delamination at Mid span of Mid Layer with Different sizes.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-251-320.jpg)
![224 Chapter 6. Forward SHM for Delamination
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.7: Delamination at Mid span of Top Layer with Different sizes.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-252-320.jpg)
![6.3. Numerical Example 225
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.8: Symmetric Delaminations at Top and Bottom Layers.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-253-320.jpg)
![226 Chapter 6. Forward SHM for Delamination
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.9: Symmetric Delaminations at ± 0.3mm Layers.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-254-320.jpg)

![228 Chapter 6. Forward SHM for Delamination
0.025
0.02
0.015
Velocity (m/sec)
500mm [012]
0.01
0.005
0
−0.005
0 0.5 1 1.5 2
Time (sec) −3
x 10
0.025 0.025
0.02 0.02
0.015 0.015
Velocity (m/sec)
Velocity (m/sec)
500mm [012] 500mm [012]
0.01 0.01
0.005 0.005
0 0
−0.005 −0.005
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.025
0.02
0.015
Velocity (m/sec)
500mm [012]
0.01
0.005
0
−0.005
0 0.5 1 1.5 2
Time (sec) −3
x 10
Figure 6.10: Multiple Delaminations Increasing towards the Depth.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-256-320.jpg)
![6.3. Numerical Example 229
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.11: 20, 50 and 100mm Delamination at mid and top Layer near Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-257-320.jpg)

![6.3. Numerical Example 231
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.12: 100mm Top Layer Delamination for Different Distance from Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-259-320.jpg)
![232 Chapter 6. Forward SHM for Delamination
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.13: 100mm Mid Layer Delamination for Different Distance from Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-260-320.jpg)
![6.3. Numerical Example 233
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.14: 100mm Bottom Layer Delamination for Different Distance from Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-261-320.jpg)

![6.3. Numerical Example 235
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
Figure 6.15: 20mm Top Layer Delamination for Different Distance from Support.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-263-320.jpg)
![236 Chapter 6. Forward SHM for Delamination
0.06
0.04
Open Circuit Voltage (Volt)
0.02 500mm [012]
0
−0.02
−0.04
−0.06
0 0.5 1 1.5 2
Time (sec) −3
x 10
0.06 0.06
0.04 0.04
Open Circuit Voltage (Volt)
Open Circuit Voltage (Volt)
0.02 500mm [012] 0.02 500mm [012]
0 0
−0.02 −0.02
−0.04 −0.04
−0.06 −0.06
0 0.5 1 1.5 2 0 0.5 1 1.5 2
Time (sec) −3
x 10 Time (sec) −3
x 10
0.06
0.04
Open Circuit Voltage (Volt)
0.02 500mm [012]
0
−0.02
−0.04
−0.06
0 0.5 1 1.5 2
Time (sec) −3
x 10
Figure 6.16: Multiple Delaminations Increasing towards the Depth](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-264-320.jpg)






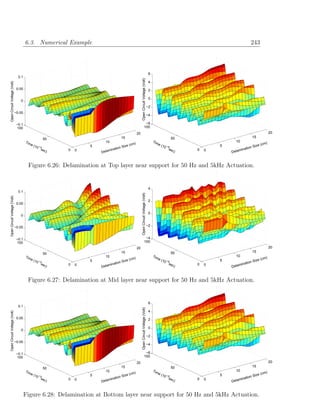
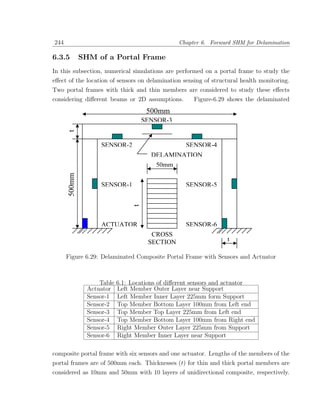







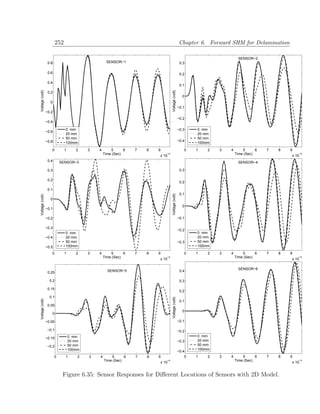


![256 Chapter 7. Structural Health Monitoring: Inverse Problem
the damage configuration of the structure, which can be used to get good assumption for
trial and error approach in the SHM.
In recent years, some researchers have applied ANN for structural damage detection
related applications [175, 215, 257, 294, 348, 350, 351, 358, 401, 402, 407, 416, 419, 418].
Much experience has been accumulated through these exploratory investigations. Lee
et al. [215] used the differences or the ratios of the mode shape components between
before and after damage for input to the neural networks. Faravelli and Pisano [117]
shown neural network approach to identify the damaged element of a multi-bay planar
truss structures. Angeles et al. [16] investigated nonlinear system identification of civil
structures using ANN. Xu [408] used ANN for sub-structural parametric identification of
post-earthquake damaged civil structures by the direct use of dynamic responses. Lee and
Lam [214] presented a neuro-fuzzy model for the diagnosis of structural damage. Rhim
and Lee [328] examined the feasibility of using ANN in conjunction with system identi-
fication techniques to detect the existence and to identify the characteristics of damage
in composite structures. Martin et al. [255] used artificial neural receptor system to
reduce the number of channel of data acquisition system for SHM. Zang et al. [421] pre-
sented structural damage detection from time domain data using independent component
analysis and ANN. Su and Ye [349] presented an online health monitoring technique for
in-service composite structures using 3D FEM, ANN and wavelet transform technique.
Ye et al. [416] reviewed performance of artificial intelligence techniques in functionalized
composite structures and as a specific case study, SHM technique was developed through
an ANN. Kao and Hung [175] detected structural damage using ANN from free vibration
responses. Su and Ye [348] trained multi-layer feed-forward, error-back propagation ANN
with the raw Lamb wave signals for SHM and validated the proposed method by locating
actual delamination and through-thickness holes in quasi-isotropic composite laminates.
Nyongesa et al. [294] proposed a technique combining conventional image analysis, ANN
classification and fuzzy logic inference to characterize shearograms for impact damage
detection.
In this chapter a methodology for automatic damage identification and localiza-
tion in composite structural components is presented using ANN. Responses for delam-
inated and healthy beam are computed using finite element analysis, which is discussed
in the earlier chapters. These responses and corresponding damage configurations are
used to train ANN as input and output of the network respectively. A feed-forward back-
propagation neural network is designed, trained, and to predict the delamination location](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-284-320.jpg)


















![7.4. Hierarchical Neural Network (HNN) 275
ensembler network with their weighted average validation error (WV ) as:
Nr
Vl = WV M ax (Mr − Vrk − Ml )2 ,
k k
(Mr + Vrk − Ml )2
k
(7.7)
k=1
Distance, D of the validation network is computed as per the Equation-(7.1) shown in
Section-7.3.1. If the opinion of validation network is with in the expertise zone of inherited
expert, and variance is with in their accepted limit, this validation network is considered
as active validation network.
As dimension reduction algorithm is different between different validation networks,
weightages (Wd ) for dimension reduction can be utilize to give more importance for better
dimension reductional algorithm.
7.4.4.4 Execution of Expert Network
Opinion (Ml ), variance (Vl ) and distance (D) of every validation network under every
expert are computed. For execution in the expert level, information of validation networks
are fused. First, the distance (D) for every validation networks are calculated and tagged
as active validation network if the distance is zero as per Section-7.3.1. Then the number
of active validation networks is counted under every expert.
7.4.4.5 Active Expert Network
Active experts are determined depending upon which expert has maximum number of
active validation network. If only one expert is active expert, weighted opinion and
weighted variance of all active validation networks under this expert are calculated, and
considered as the opinion (Mc ) and variance (Vc ) of the HNN. Where opinion (Mc ) of the
HNN is formulated as:
−1
Mc = Mlj Wd
j
Wd
j
(7.8)
[j∈Nl ] [j∈Nl ]
and variance (Vc ) of the HNN is formulated as:
−1
2
Vc = j
(Wd ) M ax (Mlj − Vlj − Mc )2 , (Mlj + Vlj − Mc )2 Wd
j
(7.9)
[j∈Nl ] [j∈Nl ]
j
where, Nl is the set of active validation network under the same expert and Wd is the
weightage of the j th dimensional reductional algorithm.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-303-320.jpg)





![8.1. Contribution of the Thesis 281
Table 8.1: Comparison with existing state-of-the-art
Present Study State-of-the-art
Degrees of freedom Both mechanical and Mechanical [326, 216]
in FE Formulation smart dof, Coupled dof, Uncoupled
Elements with Rod, Beam, Plate, Beam [326],
magnetostrictive 3D and Plane Plate [216],
sensor/actuator stress/strain Uncoupled
Modelling Equivalent Layer wise plate theory [29],
of single layer, Spectral [284, 285],
delamination Beam and Plate
Superconvergent Magnetostrictive FGM [63], Higher order beam [114]
Element actuator/sensor Thin walled composite beam [268]
th
Spectral Element n order Rod [109], Elementary beam [110, 111],
formulation (Poisson’s and Timoshenko beam [140],
shear) Beam with Poisson’s contraction [64]
magnetostrictive FGM beam and plate [59],
sensor/actuator Composite beam [249] tube [250]
Force Magnetostrictive Layered system [330], PZT [82],
Identification sensor response, Velocity [159], Wavelet [271],
Technique FFT based Spectral Greens’s function [373],
finite element Kalman Filter [239],
Multiple location [405],
ANN [228], Moving force [211],
FGM [61], Least square [413],
Delamination Time domain Natural frequency [127, 213, 251, 371],
Study study with Lamb wave [332, 350],
Single and Layer wise delamination [29, 72, 212],
multiple Damage spectral element [284, 285],
delamination, multiple delamination [191, 247],
magnetostrictive Fiber optic [234, 410]
sensor/actuator
In-situ sensor/material Magnetostrictive FGM beam and plate [59]
property identification sensor response, ANN
Geometric Delamination Mode shape [158], Modal damping [176],
Inverse study using Curvature mode shape [143],
problem ANN, Crack [125, 206, 287],
Committee machine, Fuzzy logic [359],
Five stage Dynamic residual force [126],
hierarchical Prestress concrete [243],
neural Embedded Flaw [319],
network ANN [328, 350], PZT [352, 391]](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-309-320.jpg)



![Appendix A
Euler-Bernoulli Beam
¯
[N (x)] is the shape function matrix for mechanical degrees of freedom and are expressed
as
2 2
¯ x ¯12 = −2 xβe + 2 βe x , ¯13 = − xβe + βe x ,
N11 = 1 − , N N
L L2 L3 L L2
2
¯ x ¯ xβe βe x ¯ xβe βe x2
N14 = , N15 = 2 2 − 2 3 , N16 = − + 2 ,
L L L L L
¯ ¯ x2 x3 ¯ x2 x3
N21 = 0, N22 = 1 − 3 2 + 2 3 , N23 = x − 2 + 2,
L L L L
¯ ¯ x2 x3 ¯ x2 x3
N24 = 0, N25 = 3 2 − 2 3 , N26 = − + 2 , .
L L L L
¯ ¯ x x2 ¯ x x2
N31 = 0, N32 = −6 2 + 6 3 , N33 = 1 − 4 + 3 2 , .
L L L L
¯ ¯ x x2 ¯ x x2
N34 = 0, N35 = 6 2 − 6 3 , N36 = −2 + 3 2 . .
L L L L
[K] is the element stiffness matrix. {RT } and {RI } are element load vector coefficient
due to temperature rise and current actuation respectively.
A11 B11 A11 B11
K11 = , K13 = − , K14 = − , K16 = ,
L L L L
γ + 9 D11 γ + 9 D11 γ + 9 D11
K22 = 4/3 , K23 = 2/3 , K25 = −4/3 ,
L3 L2 L3
285](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-313-320.jpg)



![289
¯ x2 βf (L2 βf + 6) x (3 + L2 βf ) ¯
N33 = 1 − 1/2 + 1/2 x2 βf − 4 , N34 = 0,
12 + L2 βf L (12 + L2 βf )
¯ x2 βf xβf ¯ x2 β f x (−6 + L2 βf )
N35 = −6 2β )
+6 , N36 = 3 −2 ,
L (12 + L f 12 + L2 βf 12 + L2 βf L (12 + L2 βf )
Nonzero entries of stiffness matrix. [K ] of Timoshenko beam is given by:
A11 B11 A11 B11
K11 = , K12 = 0, K13 = − , K14 = − , K15 = 0, K16 = ,
L L L L
A55 ψ A55 ψ
K22 = 12 , K23 = 6 A55 ψ, K24 = 0, K25 = −12 , K26 = 6 A55 ψ,
L L
D11 + 3 L2 ψ A55 B11 −D11 + 3 L2 ψ A55
K33 = , K34 = , K35 = −6 A55 ψ, K36 = ,
L L L
A11 B11 A55 ψ
K44 = , K45 = 0, K46 = − , K55 = 12 , K56 = −6 A55 ψ,
L L L
D11 + 3 L2 ψ A55
K66 = .
L
where ψ = 1/(12 + L2 βf ). Nonzero entries of mass matrix [M ] of a Timoshenko beam is
given by
M11 = 1/3 LI0 , M12 = −1/2 I0 L2 α ψ + 1/2 I1 − 6 I1 ψ, .
M13 = −1/12 L 3 I0 L2 α ψ + I1 + 36 I1 ψ , M14 = 1/6 LI0 ,
M15 = 1/2 I0 L2 α ψ − 1/2 I1 + 6 I1 ψ, M16 = −1/12 L 3 I0 L2 α ψ − I1 + 36 I1 ψ ,
Lψ 2
M22 = (13 βf 2 I0 L4 + 42 α2 I0 L2 + 294 βf I0 L2 + 1680 I0 − 84 βf α I1 L2
35
+42 βf 2 I2 L2 ),
11 11 12 7
M23 = I0 L2 − I0 L2 ψ + I0 ψ 2 L2 + 3/5 α2 I0 L4 ψ 2 − α I1 ψ L2
210 70 35 10
72 42 432
+ α I1 ψ 2 L2 + 1/10 I2 − I2 ψ + I2 ψ 2 , .
5 5 5](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-317-320.jpg)

![Appendix C
Higher Order Theories
Elements of stiffness [K], coupling stiffness [K m ] and mass [M ] matrices, are written as
1 [0] 1 [i] 1 [i]
Ku1 u1 = A ; Ku1 ui1 = A ; Ku1 w1 = 0; Ku1 wi1 = − iA13 ;
L 11 L 11 2
1 [0] 1 [i] 1 [i]
Ku1 u2 = − A11 ; Ku1 ui2 = − A11 ; Ku1 w2 = 0; Ku1 wi2 = − iA13 ;
L L 2
1 [i+m−2] 2 [i+m] i [i−1] 1 [i]
Kui1 um1 = imA55 L + 3A11 ; Kui1 w1 = − A55 ; Kui1 u2 = − A11 ;
3L 2 L
1 [i+m−1] [i+m−1] 1 [i+m−2] 2 [i+m]
Kui1 wm1 = − mA13 + iA55 ; Kui1 um2 = imA55 L − 6A11 ;
2 6L
i [i−1] 1 [i+m−1] [i+m−1] 1 [0]
Kui1 w2 = A ; Kui1 wm2 = −mA13 + iA55 ; Kw1 w1 = A ;
2 55 2 L 55
1 [i] i [i−1] 1 [0] 1 [i]
Kw1 wi1 = A55 ; Kw1 u2 = 0; Kw1 ui2 = − A55 ; Kw1 w2 = − A55 ; Kw1 wi2 = − A55 ;
L 2 L L
1 [i+m−2] 2 [i+m] 1 [i+m−1] [i+m−1]
Kwi1 wm1 = imA33 L + 3A55 ; Kwi1 um2 = mA13 − iA55 ;
3L 2
1 [i] 1 [i] 1 [i+m−2] 2 [i+m]
Kwi1 u2 = iA ; Kwi1 w2 = − A55 ; Kwi1 wm2 = imA33 L − 6A55 ;
2 13 L 6L
1 [0] 1 [i] 1 [i] i [i−1]
Ku2 u2 = A11 ; Ku2 ui2 = A11 ; Ku2 w2 = 0; Ku2 wi2 = iA13 ; Kui2 w2 = A55 ;
L L 2 2
292](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-320-320.jpg)
![293
1 [i+m−2] 2 [i+m] 1 [i+m−1] [i+m−1]
Kui2 um2 = 2imA55 L + 6A11 ; Kui2 wm2 = mA13 + iA55 ;
6L 2
1 [0] 1 [i] 1 [i+m−2] 2 [i+m]
Kw2 w2 = A ; Kw2 wi2 = A ; Kwi2 wm2 = imA33 L + 6A55 ;
L 55 L 55 6L
m 1 1 [0] [0] m 1 1 [0] [i] i [0] [i−1]
Ku1 u1 = A A ; Ku1 ui1 = A11e A11e − A11e A15e ;
Aµ L 11e 11e Aµ L 2
m 1 1 [0] [0] m 1 1 [0] [i] i [0] [i−1]
Ku1 w1 = A A ; Ku1 wi1 = A11e A15e − A11e A13e ;
Aµ L 11e 15e Aµ L 2
m 1 1 [0] [0] m 1 1 [0] [i] i [0] [i−1]
Ku1 u2 = − A A ; Ku1 ui2 = − A11e A11e − A11e A15e ;
Aµ L 11e 11e Aµ L 2
m 1 1 [0] [0] m 1 1 [0] [i] i [0] [i−1]
Ku1 w2 = − A A ; Ku1 wi2 = − A11e A15e − A11e A13e ;
Aµ L 11e 15e Aµ L 2
m 1 1 [m] [i] i [m] [i−1] mL [i] [m−1] imL [i−1] [m−1]
Kui1 um1 = A11e A11e − A11e A15e − A A + A15e A15e ;
Aµ L 2 2 11e 15e 3
m 1 1 [m] [0] m [0] [m−1]
Kum1 w1 = A11e A15e − A15e A15e ; .
Aµ L 2
m 1 1 [m] [i] i [m] [i−1] m [i] [m−1] imL [m−1] [i−1]
Kum1 wi1 = A13e A15e − A11e A13e − A15e A15e + A15e A13e ;
Aµ L 2 2 3
m 1 1 [m] [0] m [0] [m−1]
Kum1 u2 = − A11e A11e + A11e A15e ;
Aµ L 2
m 1 1 [m] [i] m [i] [m−1] i [m] [i−1] imL [m−1] [i−1]
Kum1 ui2 = − A11e A11e + A11e A15e − A11e A15e + A15e A15e ;
Aµ L 2 2 6
m 1 1 [m] [0] m [0] [m−1]
Kum1 w2 = − A11e A15e + A15e A15e ;
Aµ L 2](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-321-320.jpg)
![294 Appendix C. Higher Order Theories
m 1 1 [m] [i] m [i] [m−1] i [m] [i−1] imL [m−1] [i−1]
Kum1 wi2 = − A11e A15e + A15e A15e − A11e A13e + A15e A13e ;
Aµ L 2 2 6
m 1 1 [0] [0] m 1 1 [m] [0] m [0] [m−1]
Kw1 w1 = A A ; Kw1 wm1 = A15e A15e − A15e A13e ;
Aµ L 15e 15e Aµ L 2
m 1 1 [0] [0] m 1 1 [i] [0] i [0] [i−1]
Kw1 u2 = − A11e A15e ; Kw1 ui2 = − A11e A15e − A15e A15e ;
Aµ L Aµ L 2
m 1 1 [0] [0] m 1 1 [i] [0] i [0] [i−1]
Kw1 w2 = − A15e A15e ; Kw1 wi2 = − A15e A15e − A15e A13e ;
Aµ L Aµ L 2
m 1 1 [m] [i] i [m] [i−1] m [i] [m−1] imL [m−1] [i−1]
Kwi1 wm1 = A15e A15e − A15e A13e − A15e A13e + A13e A13e ;
Aµ L 2 2 3
m 1 1 [0] [m] m [0] [m−1]
Kwm1 u2 = − A11e A15e + A11e A13e ;
Aµ L 2
m 1 1 [i] [m] m [i] [m−1] i [m] [i−1] imL [i−1] [m−1]
Kwm1 ui2 = − A11e A15e + A11e A13e − A15e A15e + A15e A13e ;
Aµ L 2 2 6
m 1 1 [0] [m] m [0] [m−1]
Kwm1 w2 = − A15e A15e + A15e A13e ;
Aµ L 2
m 1 1 [i] [m] m [i] [m−1] i [m] [i−1] imL [i−1] [m−1]
Kwm1 wi2 = − A15e A15e + A15e A13e − A15e A13e + A13e A13e ;
Aµ L 2 2 6
m 1 1 [0] [0] m 1 1 [0] [m] m [0] [m−1]
Ku2 u2 = A A ; Ku2 um2 = A A + A11e A15e ;
Aµ L 11e 11e Aµ L 11e 11e 2
m 1 1 [0] [0] m 1 1 [0] [i] i [0] [i−1]
Ku2 w2 = A A ; Ku2 wi2 = A11e A15e + A11e A13e ;
Aµ L 11e 15e Aµ L 2
m 1 1 [i] [m] i [m] [i−1] m [i] [m−1] imL [i−1] [m−1]
Kui2 um2 = A A + A A + A11e A15e + A15e A15e ;
Aµ L 11e 11e 2 11e 15e 2 3](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-322-320.jpg)
![295
m 1 1 [m] [0] m [0] [m−1]
Kum2 w2 = A11e A15e + A15e A15e ;
Aµ L 2
m 1 1 [m] [i] m [i] [m−1] i [m] [i−1] imL [m−1] [i−1]
Kum2 wi2 = A11e A15e + A15e A15e + A11e A13e + A15e A13e ;
Aµ L 2 2 3
m 1 1 [0] [0] m 1 1 [0] [m] m [0] [m−1]
Kw2 w2 = A A ; Kw2 wm2 = A A + A15e A13e ;
Aµ L 15e 15e Aµ L 15e 15e 2
m 1 1 [i] [m] i [m] [i−1] m [i] [m−1] imL [i−1] [m−1]
Kwi2 wm2 = A A + A A + A15e A13e + A13e A13e ;
Aµ L 15e 15e 2 15e 13e 2 3
L L
Mu1 u1 = I[0] ; Mu1 ui1 = I[i] ; Mu1 w1 = 0; Mu1 wi1 = 0;
3 3
L L
Mu1 u2 = I[0] ; Mu1 ui2 = I[i] ; Mu1 w2 = 0; Mu1 wi2 = 0;
6 6
L L
Mui1 um1 = I[i+m] ; Mui1 w1 = 0; Mui1 wm1 = 0; Mui1 u2 = I[i] ;
3 6
L
Mui1 um2 = I[i+m] ; Mui1 w2 = 0; Mui1 wm2 = 0;
6
L L
Mw1 w1 = I[0] ; Mw1 wi1 = I[i] ; Mw1 u2 = 0; Mw1 ui2 = 0;
3 3
L L
Mw1 w2 = I[0] ; Mw1 wi2 = I[i] ; .
6 6
L L
Mwi1 wm1 = I[i+m] ; Mwi1 u2 = 0; Mwi1 um2 = 0; Mwi1 w2 = I[i] ;
3 6
L
Mwi1 wm2 = I[i+m] ; .
6
L L
Mu2 u2 = I[0] ; Mu2 ui2 = I[i] ; Mu2 w2 = 0; Mu2 wi2 = 0;
3 3](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-323-320.jpg)
![296 Appendix C. Higher Order Theories
L
Mui2 um2 = I[i+m] ; Mui2 w2 = 0; Mui2 wm2 = 0;
3
L L
Mw2 w2 = I[0] ; Mw2 wi2 = I[i] ;
3 3
L
Mwi2 wm2 = I[i+m] ; .
3
Matrix entries of W are given as
[0] [0] [0]
Wu0 u0 = A11 k 2 − I[0] ω 2 + A11e A11e k 2 /Aµ
[m] [m−1] [0] [m] [m−1] [0]
Wu0 um = A11 k 2 − I[m] ω 2 + jmkA15 + A11e A11e k 2 + mjkA15e A11e /Aµ
[i] [i−1] [i] [0] [0] [i−1]
Wui u0 = A11 k 2 − I[i] ω 2 − ijkA15 + A11e A11e k 2 − ijkA11e A15e /Aµ
[i+m] 2 [i+m−2] [i+m−1]
Wui um = A11 k + imA55 − I[i+m] ω 2 + (m − i)jkA15
[i] [m] [i−1] [m−1] [m] [i−1] [m−1] [i]
+ A11e A11e k 2 + imA15e A15e − ijkA11e A15e + mjkA15e A11e /Aµ
[0] [0] [0]
Ww0 w0 = A55 k 2 − I[0] ω 2 + A15e A15e k 2 /Aµ
[m] [m−1] [0] [m]
Ww0 wm = A55 k 2 − I[m] ω 2 + mjkA35 + A15e A15e k 2 /Aµ
[i] [i−1] [i] [0]
Wwi w0 = A55 k 2 − I[i] ω 2 − ijkA35 + A15e A15e k 2 /Aµ
[i+m−2] [i+m] 2 [i+m−1] [i] [m]
Wwi wm = imA33 + A55 k − I[i+m] ω 2 + (m − i)jkA35 + A15e A15e k 2 /Aµ
[0] [0] [0]
Wu0 w0 = A15 k 2 + A11e A15e k 2 /Aµ
[m−1] [m] [0] [m]
Wu0 wm = mkjA13 + A15 k 2 + A11e A15e k 2 /Aµ
[i−1] [i] [i] [0] [0] [i−1]
Wui w0 = −ijkA55 + A15 k 2 + A11e A15e k 2 − ijkA15e A15e /Aµ
[i+m−1] [i+m−2] [i+m−1] [i+m] 2
Wui wm = mkjA13 + imA35 − ijkA55 + A15 k
[i] [m] [m] [i−1]
+ A11e A15e k 2 − ijkA15e A15e /Aµ
[0] [0] [0]
Ww0 u0 = A15 k 2 + A11e A15e k 2 /Aµ
[i−1] [i] [i] [0] [0] [i−1]
Ww0 ui = ikjA55 + A15 k 2 + A11e A15e k 2 + ijkA15e A15e /Aµ
[m−1] [m] [0] [m]
Wwm u0 = −mkjA13 + A15 k 2 + A11e A15e k 2 /Aµ
[i+m−1] [i+m−1] [i+m] 2 [i+m−2]
Wwm ui = ikjA55 − mkjA13 + A15 k + imA35
[i] [m] [m] [i−1]
+ A11e A15e k 2 + ijkA15e A15e /Aµ](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-324-320.jpg)
![297
Matrices, P 0DC , P 0AC , P 1, and P 2 are given as
[m+i1 −2] [m−1] [i −1]
P 0DC (1 + m, 1 + i1 ) = −(−mi1 A55 Aµ − mi1 A15e A15e )/Aµ ;
1
[m−1] [i −1]
P 0DC (1 + m, 2 + U n + i2 ) = mi2 A15e A13e /Aµ ;
2
[i −1] [n−1]
P 0DC (2 + U n + n, 1 + i1 ) = ni1 A15e A13e /Aµ ;
1
[n+i2 −2] [n−1] [i −1]
P 0DC (2 + U n + n, 2 + U n + i2 ) = (ni2 A33 Aµ + ni2 A13e A13e )/Aµ ;
2
[0] [i −1]
P 1(1, 1 + i1 ) = i1 A11e A15e /Aµ ;
1
.
[i −1] [i −1] [0]
P 1(1, 2 + U n + i2 ) = i2 (A13
2
Aµ + A13e A11e )/Aµ ;
2
.
[0] [m−1]
P 1(1 + m, 1) = −mA11e A15e /Aµ ; .
[m] [i −1] [i ] [m−1]
P 1(1 + m, 1 + i1 ) = −(−i1 A11e A15e
1
+ mA11e A15e )/Aµ ;
1
.
[m−1] [0] [m−1]
P 1(1 + m, 2 + U n) = −m(A55 Aµ + A15e A15e )/Aµ ; .
[i +m−1] [m] [i −1] [i +m−1] [i ] [m−1]
P 1(1 + m, 2 + U n + i2 ) = (i2 A13
2
Aµ + i2 A11e A13e
2
− mA55
2
Aµ − mA15e A15e )/Aµ ;
2
[i −1] [0] [i −1]
P 1(2 + U n, 1 + i1 ) = i1 (A55
1
Aµ + A15e A15e )/Aµ ;
1
[0] [i −1]
P 1(2 + U n, 2 + U n + i2 ) = i2 A15e A13e /Aµ ;
2
[n−1] [n−1] [0]
P 1(2 + U n + n, 1) = −n(A13 Aµ + A13e A11e )/Aµ ; .
[i +n−1] [i ] [n−1] [i +n−1] [n] [i −1]
P 1(2 + U n + n, 1 + i1 ) = −(nA13
1
Aµ + nA11e A13e − i1 A55
1 1
Aµ − i1 A15e A15e )/Aµ ;
1
[0] [n−1]
P 1(2 + U n + n, 2 + U n) = −nA15e A13e /Aµ ;](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-325-320.jpg)
![298 Appendix C. Higher Order Theories
[i ] [n−1] [n] [i −1]
P 1(2 + U n + n, 2 + U n + i2 ) = (−nA15e A13e + i2 A15e A13e )/Aµ ;
2 2
[0] [0] [0] [i ] [0] [i ]
P 2(1, 1) = −(−A11e A11e − A11 Aµ )/Aµ ; P 2(1, 1 + i1 ) = −(−A11 Aµ − A11e A11e )/Aµ ;
1 1
[0] [0] [0] [i ]
P 2(1, 2 + U n) = A11e A15e /Aµ ; P 2(1, 2 + U n + i2 ) = A11e A15e /Aµ ;
2
[m] [0] [m]
P 2(1 + m, 1) = −(−A11 Aµ − A11e A11e )/Aµ ;
[i +m] [m] [i ]
P 2(1 + m, 1 + i1 ) = −(−A11
1
Aµ − A11e A11e )/Aµ ;
1
[0] [m] [m] [i ]
P 2(1 + m, 2 + U n) = A15e A11e /Aµ ; P 2(1 + m, 2 + U n + i2 ) = A11e A15e /Aµ ;
2
[0] [0] [0] [i ]
P 2(2 + U n, 1) = A11e A15e /Aµ ; P 2(2 + U n, 1 + i1 ) = A15e A11e /Aµ ;
1
[0] [0]
P 2(2 + U n, 2 + U n) = −(−A55Aµ − A15e A15e )/Aµ ;
[i ] [0] [i ]
P 2(2 + U n, 2 + U n + i2 ) = −(−A55 Aµ − A15e A15e )/Aµ ;
2 2
[0] [n] [i ] [n]
P 2(2 + U n + n, 1) = A11e A15e /Aµ ; P 2(2 + U n + n, 1 + i1 ) = A11e A15e /Aµ ;
1
[n] [0] [n]
P 2(2 + U n + n, 2 + U n) = −(−A55 Aµ − A15e A15e )/Aµ ;
[n] [i ] [n+i2 ]
P 2(2 + U n + n, 2 + U n + i2 ) = −(−A15e A15e − A55
2
Aµ )/Aµ ;
where, i1 and m varies from from 1 to U n and i2 and n varies from from 1 to W n.
Expression for Is , Ia , Ib , Ic , aa , ab , ba , bb , ca , da , cb , db are given by
Is = I0 I2 − I1 2 ; Ia = −I0 I3 2 − I2 3 + I0 I2 I4 − I1 2 I4 + 2I1 I2 I3 ;
Ib = −I2 I0 I4 + I0 I3 2 + I2 3 − 2I1 I2 I3 + I1 2 I4 ;
Ic = −I2 3 − I1 2 I4 + I0 I4 I2 − I0 I3 2 + 2I1 I2 I3 ;
[2] [0] [2] [1] [0] [1]
aa = 4I0 I2 A33 + I0 A33 I4 − 4I1 2 A33 − 4I0 I3 A33 − I2 2 A33 + 4I1 I2 A33 ;](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-326-320.jpg)
![299
[0] 2 [2] 2 [0] [1] [0] [2] [1] 2
ab = I2 4 A33 + 16A33 I1 4 − 8I2 3 A33 I1 A33 + 8I2 2 A33 A33 I1 2 + 16I1 2 A33 I2 2
[2] [0] [2] [1] [2] [1] [0] [2]
−8I0 2 I2 A33 A33 I4 − 32I0 2 I2 A33 I3 A33 + 32I0 I2 2 A33 I1 A33 + 8I0 A33 I4 I1 2 A33
[0] [1] [0] [1] [2] [1] [1] [0]
−8I0 2 A33 I4 I3 A33 + 8I0 A33 I4 I1 I2 A33 + 32I1 2 A33 I0 I3 A33 + 8I0 I3 A33 I2 2 A33
[0] [2] [2] 2 [2] [0] [0] 2
−32I1 I2 I3 I0 A33 A33 − 32I0 I2 A33 I1 2 + 8I0 I2 3 A33 A33 − 2I0 A33 I4 I2 2
[2] [1] [0] [2] [1] 2 [1] 2
−32I1 3 A33 I2 A33 + 16I0 2 I3 2 A33 A33 + 16I0 2 I2 I4 A33 − 16I1 2 I4 I0 A33
[2] 2 [0] 2 [1] 2
+16I0 2 I2 2 A33 + I0 2 A33 I4 2 − 16I2 3 I0 A33
[2] [1] [0] [1] [2] [0]
ba = −4I2 I0 A55 + 4I3 I0 A55 + I2 2 A55 − 4I1 A55 I2 + 4A55 I1 2 − A55 I0 I4 ;
[1] 2 [2] 2 [1] 2 [0] 2 [0] 2
bb = −16I2 3 I0 A55 + 16I2 2 I0 2 A55 + 16I1 2 A55 I2 2 + A55 I0 2 I4 2 + I2 4 A55
[2] 2 [2] [1] [2] [1] [2] [0]
+16A55 I1 4 − 32I2 I0 2 A55 I3 A55 + 32I2 2 I0 A55 I1 A55 − 8I2 I0 2 A55 A55 I4
[1] [0] [1] [2] [1] [0] [1] [0]
+8I3 I0 A55 I2 2 A55 + 32I3 I0 A55 A55 I1 2 − 8I3 I0 2 A55 A55 I4 + 8I1 A55 I2 A55 I0 I4
[2] [0] [0] [2] [2] [0] [2] 2
+8A55 I1 2 A55 I0 I4 − 32I1 I2 I3 I0 A55 A55 + 8I2 3 I0 A55 A55 − 32I2 I0 A55 I1 2
[0] [1] [0] [2] [0] 2 [1] [2]
−8I2 3 A55 I1 A55 + 8I2 2 A55 A55 I1 2 − 2I2 2 A55 I0 I4 − 32I1 3 A55 I2 A55
[1] 2 [0] [2] [1] 2
+16I2 I0 2 I4 A55 + 16I0 2 I3 2 A55 A55 − 16I1 2 I4 I0 A55 ;
[2] [2] [1] [0] [0] [1]
ca = 4I0 I2 A55 − 4I1 2 A55 + 4I1 I2 A55 − I2 2 A55 + I0 I4 A55 − 4I0 I3 A55 ;
[0] [1] [1] [0] [2] [2]
da = I0 A33 I4 − 4I0 I3 A33 + 4I1 I2 A33 − I2 2 A33 + 4I0 I2 A33 − 4I1 2 A33 ;
[2] 2 [1] 2 [2] 2 [2] 2 [0] 2
cb = 16I0 2 I2 2 A55 − 16I2 3 A55 I0 + 16I1 4 A55 − 32I0 I2 A55 I1 2 − 2I0 I4 A55 I2 2
[1] [2] [0] [1] [0] [2] [0] [1]
−32I1 3 I2 A55 A55 − 8I2 3 A55 I1 A55 + 8I2 2 A55 I1 2 A55 − 8I0 2 I4 A55 I3 A55
[0] [1] [1] [0] [1] [2]
+8I0 I4 A55 I1 I2 A55 + 8I0 I3 A55 I2 2 A55 + 32I0 I3 A55 I1 2 A55
[1] 2 [2] [1] [2] [1]
+16I1 2 I2 2 A55 − 32I0 2 I2 A55 I3 A55 + 32I0 I2 2 A55 I1 A55
[0] 2 [1] 2 [1] 2 [2] [0] [2] [0]
+I2 4 A55 − 16I4 I1 2 A55 I0 + 16I4 I2 A55 I0 2 − 32I3 I2 I1 A55 A55 I0 + 8I2 3 A55 A55 I0
[2] [0] [2] [0] [2] [0] [0] 2
+8I4 I1 2 A55 A55 I0 − 8I4 I2 A55 A55 I0 2 + 16I3 2 A55 A55 I0 2 + I0 2 I4 2 A55 ;
[2] [0] [2] [0] [2] [0] [1] 2
db = −32A33 A33 I1 I2 I3 I0 + 16A33 A33 I3 2 I0 2 + 8A33 A33 I4 I0 I1 2 − 16A33 I4 I0 I1 2
[1] 2 [0] 2 [0] [1] [2] 2 [0] 2
−16A33 I2 3 I0 + I0 2 A33 I4 2 + 8I0 A33 I4 I1 I2 A33 − 32I0 I2 A33 I1 2 − 2I0 A33 I4 I2 2
[1] 2 [2] 2 [1] [2] [0] [1] [0] [2]
+16A33 I4 I2 I0 2 + 16I1 4 A33 + 32I0 I3 A33 I1 2 A33 − 8I2 3 A33 I1 A33 + 8I2 2 A33 I1 2 A33
[1] [2] [0] 2 [1] 2 [2] 2 [2] [0]
−32I1 3 I2 A33 A33 + I2 4 A33 + 16I1 2 I2 2 A33 + 16I0 2 I2 2 A33 − 8A33 A33 I4 I2 I0 2
[1] [0] [2] [0] [0] [1] [2] [1]
+8I0 I3 A33 I2 2 A33 + 8A33 A33 I2 3 I0 − 8I0 2 A33 I4 I3 A33 − 32I0 2 I2 A33 I3 A33
[2] [1]
+32I0 I2 2 A33 I1 A33 ;](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-327-320.jpg)
![300 Appendix C. Higher Order Theories
Nonzero entries of [Q0] and Q1 are given as
[0] [i −1] [m] [i −1]
Q0(1, 1 + i1 ) = i1 A11e A15e /Aµ ;
1
Q0(1 + m, 1 + i1 ) = i1 A11e A15e /Aµ ;
1
[i −1] [i −1] [0]
Q0(1, 2 + U n + i2 ) = (i2 A13
2
Aµ + i2 A13e A11e )/Aµ ;
2
[m] [i −1] [m+i2 −1]
Q0(1 + m, 2 + U n + i2 ) = (i2 A11e A13e
2
+ i2 A13 Aµ )/Aµ ;
[i −1] [0] [i −1]
Q0(2 + U n, 1 + i1 ) = (i1 A55
1
Aµ + i1 A15e A15e )/Aµ ;
1
[0] [i −1]
Q0(2 + U n, 2 + U n + i2 ) = i2 A15e A13e /Aµ ;
2
[i +n−1] [n] [i −1]
Q0(2 + U n + n, 1 + i1 ) = (i1 A55
1
Aµ + i1 A15e A15e )/Aµ ;
1
.
[n] [i −1]
Q0(2 + U n + n, 2 + U n + i2 ) = i2 A15e A13e /Aµ ;
2
[0] [0] [0] [0] [i ] [i ]
Q1(1, 1) = (A11 Aµ + A11e A11e )/Aµ ; Q1(1, 1 + i1 ) = (A11e A11e + A11 Aµ )/Aµ ;
1 1
[0] [0] [0] [i ]
Q1(1, 2 + U n) = A11e A15e /Aµ ; Q1(1, 2 + U n + i2 ) = A11e A15e /Aµ ;
2
[0] [m] [m]
Q1(1 + m, 1) = (A11e A11e + A11 Aµ )/Aµ ;
[i +m] [m] [i ]
Q1(1 + m, 1 + i1 ) = (A11
1
Aµ + A11e A11e )/Aµ ;
1
[0] [m] [m] [i ]
Q1(1 + m, 2 + U n) = A15e A11e /Aµ ; Q1(1 + m, 2 + U n + i2 ) = A11e A15e /Aµ ;
2
[0] [0] [0] [i ]
Q1(2 + U n, 1) = A11e A15e /Aµ ; Q1(2 + U n, 1 + i1 ) = A15e A11e /Aµ ;
1
[0] [0]
Q1(2 + U n, 2 + U n) = (A15e A15e + A55Aµ )/Aµ ;
[i ] [0] [i ]
Q1(2 + U n, 2 + U n + i2 ) = (A55 Aµ + A15e A15e )/Aµ ;
2 2
[0] [n] [i ] [n]
Q1(2 + U n + n, 1) = A11e A15e /Aµ ; Q1(2 + U n + n, 1 + i1 ) = A11e A15e /Aµ ;
1
[n] [0] [n]
Q1(2 + U n + n, 2 + U n) = (A55 Aµ + A15e A15e )/Aµ ;
[n] [i ] [n+i2 ]
Q1(2 + U n + n, 2 + U n + i2 ) = (A15e A15e + A55
2
Aµ )/Aµ .
where, i1 and m varies from from 1 to U n and i2 and n varies from from 1 to W n.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-328-320.jpg)
![References
[1] Abdelghani Maher and Michael I. Friswell ”Sensor Validation for Structural Systems
with Additive Sensor Faults” Structural Health Monitoring Volume 3 Pages 265-275
(2004).
[2] Abe, M., Fujino, Y., Kajimura, M., Yanagihara, M., and Sato, M. ”Monitoring of
a Long Span Suspension Bridge by Ambient Vibration Measurement,” Structural
Health Monitoring, Pages 400-407 (2000).
[3] Anthony E Ackerman, Chen Liang and Craig A Rogers ”Dynamic transduction
characterization of magnetostrictive actuators” Smart Material Structure Volume 5
Pages 115-120 (1996).
[4] Adams, R.D., P. Cawley, C.J. Pye and B.J. Stone, , A Vibration Technique for
Non-Destructively Assessing the Integrity of Structures, Journal of Mechanical En-
gineering Science, 20, Pages 93-100 (1978).
[5] Adams Robert and James F. Doyle Multiple Force Identification for Complex Struc-
tures Experimental Mechanics, Volume 42, Number 1, Pages 25-36 (2002) ”
[6] Adams Douglas E and Charles R. Farrar ”Classifying Linear and Nonlinear Struc-
tural Damage Using Frequency Domain ARX Models” Structural Health Monitor-
ing, Volume 1, Number 2, Pages 185-201 (2002)
[7] Adly A. A. and S. K. Abd-El-Hafiz, ”Identification and testing of an efficient hop-
field neural network magnetostriction model” Journal of Magnetism and Magnetic
Materials Volume 263, Issue 3 , Pages 301-306 (2003).
[8] Adly, A.A.; Abd-El-Hafiz, S.K. ”Using neural networks in the identification of
301](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-329-320.jpg)
![302 References
Preisach-type hysteresis models” IEEE Transactions on Magnetics Volume 34, Issue
3, Pages 629-635 (1998).
[9] Adly, A.A.; Mayergoyz, I.D. ”Magnetostriction simulation using anisotropic vector
Preisach-type models.” IEEE Transactions on Magnetics Volume 32, Issue 5 Part
2, Pages 4773-4775 (1996).
[10] Adly, A. A.; S. K. Abd-El-Hafiz and I. D. Mayergoyz ”Using neural networks in
the identification of Preisach-type magnetostriction and field-temperature models”
Journal of Applied Physics, Volume 85, Issue 8, Pages 5211-5213 (1999).
[11] Adly A.A.; Mayergoyz I.D. and A. Bergqvist.”Utilizing anisotropic Preisach-type
models in the accurate simulation of magnetostriction” IEEE Trans. Magn. Volume
33 Number 5, Page 39-31 (1997).
[12] Agneni, A., Crema, L.B., and Mastroddi, F. ”Damage Detection from Truncated
Frequency Response Functions,” European COST F3 Conference on System Iden-
tification and Structural Health Monitoring, Madrid, Spain, Pages 137-146 (2000).
[13] Ahmadian, H., Mottershead, J.E., and Friswell, M.I. ”Substructure Modes for Dam-
age Detection,” Structural Damage Assessment Using Advanced Signal Processing
Procedures, Proceedings of DAMAS ’97, University of Sheffield, UK, Pages 257-268
(1997).
[14] Aime J.C.; M. Brissaud and L. Laguerre, ”Spatial analysis of torsional wave prop-
agation in a cylindrical waveguide.” Application to magnetostrictive generation.
Journal Acoustic Society America Volume 109, Pages 51-58 (2001).
[15] Anderson, James A, ”A Simple Neural Network Generating an Interactive Memory”
Mathematical Biosciences Volume 14 Pages 197-220 (1972)
[16] Angeles Francisco J. Rivero, Eduardo Gomez Ramirez and Ruben Garrido ”Non-
linear Civil Structures Identification Using a Polynomial Artificial Neural Network”
Lecture Notes in Computer Science Springer-Verlag GmbH Volume 3773/2005
Pages: 138 - 145 (2005)
[17] Anjanappa, M., and Wu, Y. F. ”Magnetostrictive particulate actuators: configu-
ration, modeling and charaterization” Smart Material and Structures, Volume 6,
Pages 393–402 (1997).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-330-320.jpg)
![References 303
[18] Anjanappa M and Bi J ”A theoretical and experimental study of magnetostrictive
mini-actuators” Smart Material Structure Volume 3 Pages 83-91 (1994).
[19] Anjanappa M and Bi J ”Magnetostrictive mini actuators for Smart structures ap-
plications” Smart Material Structure Volume 3 Pages 383-390 (1994).
[20] Ansari Farhad ”Fiber optic health monitoring of civil structures using long gage
and acoustic sensors”
[21] Aoki Yoshio and O-Il Byon ”Damage detection of CFRP pipes and shells by using
localized flexibility method” Advanced Composite Materials; Volume 10, Numbers
2-3 Pages: 189 - 198
[22] Arai K.I. and T. Honda. Robotica Volume 14, Page 477 (1996).
[23] Armstrong W D ”The non-linear deformation of magnetically dilute magnetostric-
tive particulate composites” Materials Science and Engineering A; Volume 285,
Issues 1-2, 15, Pages 13-17 (2000).
[24] Armstrong W.D. , J. Applied Phys. Volume 81 Pages 2321-3548 (1997).
[25] Auweraer Herman Van der and Bart Peeters ”International Research Projects on
Structural Health Monitoring: An Overview” Structural Health Monitoring, Volume
2, Number 4, Pages 341-358 (2003)
[26] Baker Wayne, Iain McKenzie and Rhys Jones ”Development of life extension strate-
gies for Australian military aircraft, using structural health monitoring of compos-
ite repairs and joints” Composite Structures, Volume 66, Issues 1-4, Pages 133-143
(2004).
[27] Balageas Daniel L. ”Structural health monitoring R&D at the European Research
Establishments in Aeronautics (EREA)” Aerospace Science and Technology, Volume
6, Issue 3, Pages 159-170 (2002).
[28] Bamnios G. and A. Trochides, Dynamic behavior of a cracked cantilever beam,
Applied Acoustics 45, Pages 97-112 (1995).
[29] Barbero, E.J. and Reddy, J.N. ”Modeling of delamination in composite laminates
using a layer-wise plate theory” International Journal of Solids and Structures,
Volume 28, Pages 373-388 (1991).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-331-320.jpg)
![304 References
[30] BarkeD. W., W. K. Chiu, and S. Fernando ”In situ Damage Quantification in Bolts”
Structural Health Monitoring Volume , Pages: 19-31 (2004).
[31] Batra R.C., S. Aimmanee ”Vibrations of thick isotropic plates with higher order
shear and normal deformable Plate theories” Computers and Structures Volume 83
Pages 934-955 (2005).
[32] Belytschko T. and Bindeman L.P. ”Assumed strain stabilization of the 4-node
quadrilateral with 1-point quadrature for nonlinear problems” Computer Methods
Applied Mechanics Engineering, Volume 88, Pages 311–340 (1991).
[33] Benabou A. , S. Clnet and F. Piriou ”Comparison of Preisach and Jiles-Atherton
models to take into account hysteresis phenomenon for finite element analysis”
Journal of Magnetism and Magnetic Materials Volume 261, Issues 1-2, Pages 139-
160 (2003).
[34] Benbouzid Mohamed E. H.; Gilbert Reyne and Gerard Meunier; ”Nonlinear finite
element modelling of giant magnetostriction” IEEE transactions on magnetics, Vol-
ume 29, Number 6, Pages 2467-2469 (1993).
[35] Benbouzid Mohamed E. H.; Gilbert Reyne and Gerard Meunier; ”Nonlinear finite
element modelling of giant magnetostriction” IEEE transactions on magnetics, Vol-
ume 29, Number 6, Pages 2467-2469 (1993).
[36] Benbouzid Mohamed E. H; Lars Kvarnsjo and Goran Engdahl ”Dynamic modelling
of giant magnetostriction in terfenol-d rods by the finite element method” IEEE
transactions on magnetics, Volume 31, Number 3, Pages 1821-1823 (1995).
[37] Benbouzid Mohamed E. H.; Lars Kvarnsjo and Goran Engdahl; ”Dynamic modelling
of giant magnetostriction in terfenol-d rods by the finite element method.” IEEE
transactions on magnetics, Volume 31 Number 3 Pages 1821-1823 (1995).
[38] Benbouzid Mohamed E. H.; Gilbert Reyne and Gerard Meunier; ”Finite element
modelling of magnetostrictive devices: Investigations for the design of the magnetic
circuit.” IEEE transactions on magnetics, Volume 31, Number 3, Pages 1813-1816
(1995).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-332-320.jpg)
![References 305
[39] Bernal, D. ”Extracting Flexibility Matrices from State-Space Realizations,” Euro-
pean COST F3 Conference on System Identification and Structural Health Moni-
toring, Madrid, Spain, Pages 127-135 (2000).
[40] Berthelot J.M. , Analysis of the transverse cracking of cross-ply laminates: a gen-
eralised approach. Journal of Composite Materials Volume 31 18, Pages 1780-1805
(1997).
[41] Bhalla Suresh and Chee Kiong Soh ”High frequency piezoelectric signatures for
diagnosis of seismic/blast induced structural damages” NDT & E International,
Volume 37, Issue 1, Pages 23-33, (2004).
[42] Bhalla Suresh , Y.W. Yang, J. Zhao and C.K. Soh ”Structural health monitor-
ing of underground facilities - Technological issues and challenges” Tunnelling and
Underground Space Technology, Volume 20, Issue 5, Pages 487-500, (2005).
[43] Boltezar M.; B. Stancar and A. Kuhelj, Identification of transverse crack location
in flexural vibrations of free-free beams, Journal of Sound and Vibration 211, Pages
729-734 (1998).
[44] Bonato, P., Ceravolo, R., De Stefano, A., and Molinari, F. ”Modal Identification by
Cross-Time-Frequency Estimators,” Damage Assessment of Structures, Proceedings
of the International Conference on Damage Assessment of Structures (DAMAS 99),
Dublin, Ireland, Pages 363-372 (1999).
[45] Brian Culshaw ”Smart Structures and materials”, Artech house, Boston (1996).
[46] Bray, D.E. and Roderick S.K., Nondestructive Evaluation, McGraw-Hill, New York,
(1989).
[47] Brennan M J, S J Elliott and R J Pinnington ”A non-intrusive fluid-wave actuator
and sensor pair for the active control of fluid-borne vibrations in a pipe” Smart
Material Structure Volume 5 Pages 281-296 (1996).
[48] Briggs John C and Ming-Kai Tse Impact force identification using extracted modal
parameters and pattern matching International Journal of Impact Engineering. Vol-
ume 12, Issue 3, Pages 361-372 (1992).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-333-320.jpg)
![306 References
[49] Brown Rebecca L. and Douglas E. Adams ”Equilibrium point damage prognosis
models for structural health monitoring” Journal of Sound and Vibration, Volume
262, Issue 3, Pages 591-611 (2003).
[50] Bukkapatnam S. T.S; J. M. Nichols; M. Seaver; S. T. Trickey and M. Hunter
”A Wavelet-based, Distortion Energy Approach to Structural Health Monitoring”
Structural Health Monitoring Volume 4, Pages 247-258 (2005).
[51] Busby Henry R and David M. Trujillo Solution of an inverse dynamics problem
using an eigenvalue reduction technique Computers & Structures Volume 25, Issue
1, Pages 109-117 (1987).
[52] Butler, J.L, ”Application manual for the design of Terfenol-D magnetostrictive
transducers” Edge Technologies Inc., Ames Iowa, (1988).
[53] Calkins, F.T.; Smith, R.C.; Flatau, A.B. ”Energy-based hysteresis model for magne-
tostrictive transducers” IEEE Transactions on Magnetics Volume 36, Issue 2, Pages
429-439 (2000).
[54] Peter Carden E and Paul Fanning ”Vibration Based Condition Monitoring: A Re-
view” Structural Health Monitoring Volume 3 Pages 355-377 (2004).
[55] Carrasco, C., Osegueda, R., Ferregut, C., and Grygier, M. ”Localization and Quan-
tification of Damage in a Space Truss Model Using Modal Strain Energy,” Smart
Systems for Bridges, Structures, and Highways, Proceedings of SPIE, Volume 3043,
Pages 181-192 (1997).
[56] Carrion F J; J F Doyle and A Lozano ”Structural health monitoring and damage
detection using a sub-domain inverse method” Smart Material Structure Volume
12, Pages 776-784 (2003).
[57] Cawley, P., and Adams, R.D. ”The Location of Defects in Structures from Mea-
surements of Natural Frequencies,” Journal of Strain Analysis, Volume 14, Number
2, Pages 49-57 (1979).
[58] Caccese Vincent, Richard Mewer and Senthil S. Vel ”Detection of bolt load loss
in hybrid composite/metal bolted connections” Engineering Structures, Volume 26,
Issue 7, Pages 895-906 (2004).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-334-320.jpg)
![References 307
[59] Chakraborty Abir ”Wave propagation in anisotropic & inhomogeneous structures”
Department of Aerospace Engineering, Indian Institute of Science, Bangalore, July
2004 Thesis.
[60] Chakraborty, Abir; Gopalakrishnan S ”Wave propagation in inhomogeneous layered
media: solution of forward and inverse problems” Acta Mechanica, Volume 169,
Numbers 1-4 Pages: 153 - 185
[61] Chakraborty Abir and Gopalakrishnan S Force identification in a FGM plate us-
ing truncated response American Institute of Aeronautics and Astronautics 44th
AIAA/ASME/ASCE/AHS Structures, Structural Dynamics, and Materials Con-
fere 7-10 April 2003, Norfolk, Virginia AIAA 2003-1590”
[62] Chakraborty Abir, Mahapatra D R, Gopalakrishnan S. ”Finite element analysis of
free vibration and wave propagation in asymmetric composite beams with structural
discontinuities.” Composite Structures; Volume 55 Number 1 Pages 23-36 (2002).
[63] Chakrabortya Abir, Gopalakrishnana S, J. N. Reddy; ”A new beam finite element
for the analysis of functionally graded materials” International Journal of Mechan-
ical Sciences Volume 45 Pages 519–539 (2003).
[64] Chakraborty, Abir; Gopalakrishnan, S. ”Poisson’s contraction effects in a deep lam-
inated composite beam.” Mechanical Advances in Materials and Structures 10(3),
205-225 (2003).
[65] Chakraborty S and G R Tomlinson ”An initial experimental investigation into the
change in magnetic induction of a Terfenol-D rod due to external stress” Smart
Material Structure 12 (2003) 763-768
[66] Tommy H. T. Chan, L. Guo and Z. X. Li ”Finite element modelling for fatigue stress
analysis of large suspension bridges” Journal of Sound and Vibration, Volume 261,
Issue 3, Pages 443-464 (2003).
[67] Chan T. H. T, Li Z. X. and Ko J. M. ”Fatigue analysis and life prediction of bridges
with structural health monitoring data - Part II: application” International Journal
of Fatigue, Volume 23, Issue 1, Pages 55-64 (2001).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-335-320.jpg)
![308 References
[68] Chan T H T, Yu L, Tam HY, Y Q Ni, S Y Liu, W H Chung and L K Cheng
”Fiber Bragg grating sensors for structural health monitoring of Tsing Ma bridge:
Background and experimental observation” Engineering Structures
[69] Chan Tommy H. T, Ling Yu And S. S. Law Comparative studies on moving force
identification from bridge strains in laboratory Journal of Sound and Vibration
Volume 235, Issue 1, Pages 87-104 (2000).
[70] Chang C. and C.T. Sun, ”Determining transverse impact force on a composite
laminate by signal deconvolution” Experimental Mechanics Volume 29, Pages 414-
419 (1989).
[71] Chase J. Geoffrey, Vincent Begoc and Luciana R. Barroso ”Efficient structural
health monitoring for a benchmark structure using adaptive RLS filters” Computers
& Structures, Volume 83, Issues 8-9, Pages 639-647 (2005).
[72] Chattopadhyay A, H. S. Kim and A. Ghoshal ”Non-linear vibration analysis of smart
composite structures with discrete delamination using a refined layerwise theory”
Journal of Sound and Vibration, Volume 273, Issues 1-2, Pages 387-407 (2004).
[73] Chelidze David ”Identifying Multidimensional Damage in a Hierarchical Dynamical
System” Nonlinear Dynamics Volume 37, Number 4 Pages: 307 - 322
[74] Cheng L K ”High-speed Dense Channel Fiber Bragg Grating Sensor Array For
Structural Health Monitoring.” 2005 International Conference on MEMS, NANO
and Smart Systems Pages 364-365 (2005).
[75] Chen Genda, Huimin Mu, David Pommerenke, and James L. Drewniak ”Damage
Detection of Reinforced Concrete Beams with Novel Distributed Crack/Strain Sen-
sors” Structural Health Monitoring Volume 3 Pages 225-243 (2004).
[76] Cheng K. W. E., Lee W. S, Tang C. Y. and Chan L. C. ”Dynamic modelling of
magnetic materials for high frequency applications” Journal of Materials Processing
Technology Volume 139, Issues 1-3 , Pages 578-584 (2003).
[77] Chinchalkar, S. ”Determination of crack location in beams using natural frequen-
cies”, Journal of Sound and Vibration, Volume 247 Number 3 Pages 417-429 (2001).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-336-320.jpg)
![References 309
[78] Ching Jianye and James L. Beck ”New Bayesian Model Updating Algorithm Ap-
plied to a Structural Health Monitoring Benchmark” Structural Health Monitoring
Volume 3 Pages 313-332.(2004).
[79] Cho Seung Hyun, Young Kyu Kim and Yoon Young Kim; ”The optimal design and
experimental verification of the bias magnet configuration of a magnetostrictive
sensor for bending wave measurement” Sensors and Actuators A: Physical
[80] Chock Jeffrey M.K. and Rakesh K. Kapania On load updating for finite element
models AIAA 2002-1214 (2002).
[81] Chock Jeffrey M.K. and Rakesh K. Kapania Finite element load updating for plates
AIAA
[82] Choi Keeyoung and Fu-Kuo Chang Identification of Impact Force and Location
Using Distributed Sensors AIAA Journal 0001-1452 Volume 34 Number 1 Pages
136-142 (1996).
[83] Choi, S., and Stubbs, N. ”Nondestructive Damage Detection Algorithms for 2D
Plates,” Smart Systems for Bridges, Structures, and Highways, Proceedings of SPIE,
Volume 3043, Pages 193-204 (1997).
[84] Chondros, T.G. ; A.D. Dimarogonas and J. Yao, A continuous cracked beam vibra-
tion theory, Journal of Sound and Vibration 215, Pages 17-34 (1998).
[85] Choudhary P. and T. Meydan; ”A novel accelerometer design using the inverse
magnetostrictive effect”; Sensors and Actuators A: Physical; Volume 59, Issues 1-3,
Pages 51-55 (1997).
[86] Christides S and Barr A.D.S, One-dimensional theory of cracked Bernoulli-Euler
beams, International Journal of the Mechanical Sciences 26, Pages 639-648 (1984).
[87] Christoforou Andreas P., Abdallah A. Elsharkawy and Lotfi H. Guedouar An inverse
solution for low-velocity impact in composite plates Computers & Structures Volume
79, Issues 29-30 , Pages 2607-2619 (2001).
[88] Chung Deborah D. L. ”Composites get smart” Materials Today, Volume 5, Issue 1,
Pages 30-35 (2002).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-337-320.jpg)
![310 References
[89] Churchland P.S and Sejnowski T.J, The Computational Brain, MIT Press (1992).
[90] Coats, T.W. and Harris, C.E. ”Experimental verification of a progressive damage
model for IM7/5260 laminates subjected to tension-tension fatigue”, Journal of
Composite Materials, Volume 29 Number 3, Pages 280-305 (1995).
[91] Collette S A, Sutton M A, P Miney, A P Reynolds, Xiaodong Li, P E Colavita,
W A Scrivens, Y Luo, T Sudarshan, P Muzykov and M L Myrick ”Development of
patterns for nanoscale strain measurements: I. Fabrication of imprinted Au webs
for polymeric materials” Nanotechnology Volume 15 Pages 1812-1817 (2004).
[92] D’Cruz Jonathan, John D. C. Crisp and Thomas G. Ryallt Determining a Force Act-
ing on a Plate -An Inverse Problem AIAA Journal 0001-1452 Volume. 29, Number
3 Pages 464-470 (1991).
[93] Cullen J.R, K.B. Hathaway and A.E. Clark. Journal of Applied Physics, Volume
81, Pages 5417(1997).
[94] Cusano A, Cutolo A, J. Nasser, M. Giordano and A. Calabro ”Dynamic strain
measurements by fibre Bragg grating sensor” Sensors and Actuators A: Physical,
Volume 110, Issues 1-3, Pages 276-281 (2004).
[95] Dapino Marcelo, J, Ralph C. Smith., Leann, E. Faidley. and Alison, B. Flatau, ”A
coupled structural-magnetic strain and stress model for magnetostrictive transduc-
ers” Journal of Intelligent Material Systems Structures, Volume 11, Pages 135-151
(2000).
[96] Debruyne H, Clenet S and Piriou F ”Characterisation and modelling of hysteresis
phenomenon” Mathematics and Computers in Simulation Volume 46, Issues 3-4 ,
Pages 301-311 (1998).
[97] DeWolf John T; Robert G; Michael Culmo ”Monitoring Bridge Performance.” Struc-
tural Health Monitoring, Volume 1, Number 2, Pages 129-138 (2002).
[98] Dimitris Kouzoudis and Craig A Grimes ”The frequency response of magnetoelastic
sensors to stress and atmospheric pressure” Smart Material Structure, Volume 9,
Pages 885-889 (2000).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-338-320.jpg)
![References 311
[99] Doebling, S.W., and C.R. Farrar ”Using Statistical Analysis to Enhance Modal-
Based Damage Identification,” in Structural Damage Assessment Using Advanced
Signal Processing Procedures, Proceedings of DAMAS ’97, University of Sheffield,
UK, Pages 199-210 (1997).
[100] Doebling, S.W., C.R. Farrar, M.B. Prime, and DW. Shevitz ”Damage dentification
and Health Monitoring of Structural and Mechanical Systems from Changes in their
Vibration Characteristics: A Literature Review,” Los Alamos National Laboratory
report LA-13070-MS (1996).
[101] Doebling, S.W., C.R. Farrar, M.B. Prime, and D.W. Shevitz ”A Review of Damage
Identification Methods that Examine Changes in Dynamic Properties,” Shock and
Vibration Digest, Volume 30, Number 2, Pages 91-105 (1998).
[102] Dong Guangming, Jin Chen, Xuanyang Lei, Zuogui Ning, Dongsheng Wang,
Xiongxiang Wang ”Global-Based Structure Damage Detection Using LVQ Neural
Network and Bispectrum Analysis” Lecture Notes in Computer Science Springer-
Verlag GmbH Volume 3498/2005 Page: 531.
[103] Dong K and Wang X ”Influences of large deformation and rotary inertia on wave
propagation in piezoelectric cylindrically laminated shells in thermal environment”
International Journal of Solids and Structures,
[104] Doyle, J. F. , ”Further developments in determining the dynamic contact law”
Experimental Mechanics, Volume 24, Pages 265-270 (1984).
[105] Doyle, J. F. , ”Experimentally determining the contact Force during the transverse
impact of an orthotropic plate” Journal of Sound and Vibration Volume 118, Num-
ber 3, Pages 441-448 (1987).
[106] Doyle, J. F. Force Identification from Dynamic Responses of a Bimaterial Beam
Experimental Mechanics, Volume 33, Number 1, Pages 64-69 (1993).
[107] Doyle, J. F. A Wavelet Deconvolution Method for Impact Force Identification Ex-
perimental Mechanics, Volume 37, Number 4, Pages 403-408 (1997)”
[108] Doyle, J. F. ”Wave Propagation in structures” New York: Springer (1997).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-339-320.jpg)
![312 References
[109] Doyle, J. F. ”A spectrally formulated finite element for longitudinal wave propaga-
tion” International Journal Analalytical Experimental Modal Analysis, Volume 3,
Pages 1-5 (1988).
[110] Doyle J. F., Farris T. N. ”A spectrally formulated finite element for flexural wave
propagation in beams” International Journal Analalytical Experimental Modal
Analysis, Volume 5, Pages 13-23 (1990).
[111] Doyle, J. F., Farris, T. N.: ”A spectrally formulated finite element for wave prop-
agation in 3-D frame structures.” International Journal Analalytical Experimental
Modal Analysis Pages 223-237 (1990).
[112] Dupr L. R, Van Keerb R and J. A. A. Melkebeeka ”Evaluation of magnetostrictive
effects in soft magnetic materials using the Preisach theory” Journal of Magnetism
and Magnetic Materials, Volumes 254-255, Pages 121-123 (2003).
[113] Dvorak G.J, N. Laws and M. Hejazi, Analysis of progressive matrix cracking in
composite laminates I. Thermoelastic properties of a ply with cracks. Journal of
Composite Materials, Volume 19, Pages 216-234 (1985).
[114] Eisenberger, M.; ”An exact higher order beam element” Computer & Structures
Volume 81, Pages 147-152 (2003).
[115] Epureanu Bogdan I and Shih-Hsun Yin ”Identification of damage in an aeroelas-
tic system based on attractor deformations” Computers & Structures, Volume 82,
Issues 31-32, Pages 2743-2751 (2004).
[116] Ettouney, M., Daddazio, R., Hapij, A., and Aly, A. ”Health Monitoring of Complex
Structures,” Smart Structures and Materials (1999): Industrial and Commercial
Applications of Smart Structures Technologies, Proceedings of SPIE, Volume 3326,
Pages 368-379 (1998).
[117] Faravelli L, and A.A. Pisano ”A neural network approach to structure damage
assessment” IASTED International Conference on Intelligent Information Systems,
Pages 585 (1997).
[118] Farhey Daniel N ”Bridge Instrumentation and Monitoring for Structural Diagnos-
tics” Structural Health Monitoring, Volume 4, Number 4, 301-318 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-340-320.jpg)
![References 313
[119] Fenn Ralph C, James R Downer, Dariusz A Bushko, Vijay Gondhalekar and Norman
D Ham; ”Terfenol-D driven flaps for helicopter vibration reduction” Smart Material
Structure, Volume 5 Pages 49-57 (1996).
[120] Fernandez-Saez J and C. Navarro, Fundamental frequency of cracked beams: an
analytical approach, Journal of Sound and Vibration 256, Pages 17-31 (2002).
[121] Fernandez-Saez J, L. Rubio and C. Navarro, Approximate calculation of the fun-
damental frequency for bending vibrations of cracked beams Journal of Sound and
Vibration 225, Pages 345-352 (1999).
[122] Flores Jhojan E. Rojas, Felipe A. Chegury Viana, Domingos A. Rade and Valder
Steffen, Jr. Force Identification of Mechanical Systems by Using Particle Swarm Op-
timization 10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Con-
ference 30 August - 1 September 2004, Albany, New York (2004).
[123] Franca L.P and A. Russo, ”Unlocking with residual-free bubbles” Computer Meth-
ods Applied Mechanics Engineering Volume 142, Pages 361-364 (1997).
[124] Friswell Michael; J E T Penny ”Crack Modeling for Structural Health Monitoring.”
Structural Health Monitoring, Volume 1, Number 2, Pages 139-148 (2002)
[125] Fujimoto Shin-etsu and Hideki Sekine ”Identification of crack and disbond fronts in
repaired aircraft structural panels with bonded FRP composite patches” Composite
Structures
[126] Fukunaga Hisao, Masaki Kameyama, Yoshiro Ogi ”Damage identification of lami-
nated composite structures based on dynamic residual forces” Advanced Composite
Materials, Volume 10, Numbers 2-3 Pages: 209 - 218
[127] Gadelrab, R.M. ”The effect of delamination on the natural frequencies of a lami-
nated composite beam”, Journal of Sound and Vibration, Volume 197, Number 3,
Pages 283-292 (1996).
[128] Gandhi, M.V. and Jhompson, B.S. ”Smart Materials and Systems” Chapman and
Hall, London (1992).
[129] Gehring G A, M D Cooke, I S Gregory, W J Karl and R Watts ”Cantilever uni-
fied theory and optimization for sensors and actuators” Smart Material Structure,
Volume 9, Pages 918-931 (2000).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-341-320.jpg)
![314 References
[130] Gex Dominique, Yves H. Berthelot and Christopher S. Lynch ”Low frequency bend-
ing piezoelectric actuator with integrated ultrasonic NDE functionality” NDT & E
International, Volume 38, Issue 8, Pages 627-633 (2005).
[131] Gex Dominique, Yves H. Berthelot and Christopher S. Lynch ”Low frequency bend-
ing piezoelectric actuator with integrated ultrasonic NDE functionality” NDT & E
International, Volume 38, Issue 7, Pages 582-588 (2005).
[132] Ghosh D. P. and Gopalakrishnan S., ”Structural health monitoring in a composite
beam using magnetostrictive material through a new FE formulation” Proceedings
of international conference on smart materials, structures and systems ISSS-SPIE
2002 December 12-14 (2002)
[133] Ghoshal Anindya, Mannur J. Sundaresan, Mark J. Schulz and P. Frank Pai ”Struc-
tural health monitoring techniques for wind turbine blades” Journal of Wind Engi-
neering and Industrial Aerodynamics, Volume 85, Issue 3, 24 Pages 309-324 (2000).
[134] Giurgiutiu Victor, Florin Jichi, Justin B Berman, and Jason M Kamphaus ”Theo-
retical and experimental investigation of magnetostrictive composite beams” Smart
Material Structure, Volume 10, Pages 934-945 (2001).
[135] Giurgiutiu V, and Rogers, C. ”The Electro-Mechanical (E/M) Impedance Method
for Structural Health Monitoring and Non-Destructive Evaluation,” Interna-
tional Workshop on Structural Health Monitoring, Stanford University, California,
September 18-20, (1997).
[136] Giurgiutiu, V., Redmond, J., Roach, D., and Rackow, K. ”Active Sensors for Health
Monitoring of Aging Aerospace Structures,” Smart Structures and Materials: Smart
Structures and Integrated Systems, Proceedings of SPIE, Volume 3985, Pages 294-
305 (2000).
[137] Giurgiutiu Victor and Andrei Zagrai ”Damage Detection in Thin Plates and
Aerospace Structures with the Electro-Mechanical Impedance Method” Structural
Health Monitoring, Volume 4, Pages 99-118 ( 2005).
[138] Giurgiutiu Victor; Andrei N Zagrai; JingJing Bao ”Piezoelectric Wafer Embedded
Active Sensors for Aging Aircraft Structural Health Monitoring” Structural Health
Monitoring, Volume 1, Number 1, 41-61 (2002).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-342-320.jpg)
![References 315
[139] Gopalakrishnan S. ”A deep rod finite element for structural dynamics and wave
propagation problems” International Journal of Numerical Methods in Engineering;
Volume 48, Pages 731-744 (2000).
[140] Gopalakrishnan, S., Martin, M., Doyle, J. ”A matrix methodology for spectral
analysis of wave propagation in multiple connected timoshenko beam” Journal of
Sound and Vibration, Volume 158, Pages 11-24 (1992).
[141] Grimes C A, Ong K G, Loiselle K, Stoyanov P G, Kouzoudis D, Liu Y, Tong C
and Tefiku F ”Magnetoelastic sensors for remote query environmental monitoring”
Smart Material Structure, Volume 8, Pages 639-646 (1999).
[142] Hall D and Flatau A ”One-dimensional analytical constant parameter lin-
ear electromagnetic-magnetomechanical models of a cylindrical magnetostrictive
terfenol-d transducer” Proc. ICIM94: 2nd Int. Conf. on Intelligent Materials
(Williamsburg, VA, 1994) Pages 605-616 (1994)
[143] Hamey Cole S, Wahyu Lestari, Pizhong Qiao, and Gangbing Song ”Experimental
Damage Identification of Carbon/Epoxy Composite Beams Using Curvature Mode
Shapes” Structural Health Monitoring, Volume 3, Pages 333-353 (2004).
[144] Han Jeongho, Chun-Gon Kim and Jung-Yub Kim ”The propagation of lamb waves
in a laminated composite plate with a variable stepped thickness” Composite Struc-
tures
[145] Han Yong, Arun K. Misra, and Dan Mateescu, ”A method for crack detection in
structures using piezoelectric sensors and actuators” 2005 International Conference
on MEMS,Nano and Smart Systems, Pages 353-354 (2005).
[146] Han Y.M and Hahn H.T, Ply cracking and property degradations of symmetric bal-
anced laminates under general in-plane loading. Composites Science and Technology
Volume 35, Pages 377-397 (1989).
[147] Hashin Z, Analysis of cracked laminate: a variational approach. Mechanics of Ma-
terials Volume 4, Pages 121-136 (1985).
[148] Hashin Z, Analysis of orthogonally cracked laminates under tension. Transations of
the ASME: Journal of Applied Mechanics, Volume 54, Pages 872-879 (1987).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-343-320.jpg)
![316 References
[149] Hattori S, T. Shimada and K. Matsuhashi; ”Highly accurate low frequency elastic
wave measurement using magnetostrictive devices” NDT & E International; Volume
34, Issue 6, Pages 373-379 (2001).
[150] Haykin Simon ”Neural Networks : A Comprehensive foundation” Pearson Educa-
tion Asia.
[151] He J, Li Y Q, ”Relocation of anti-resonances of a vibratory system by local structural
changes” The International Journal of Analytical and Experimental Modal Analysis,
Volume 10, Number 4, Pages 224-235 (1995).
[152] Hearn, G. and R.B. Testa, Modal Analysis for Damage Detection in Structures,
Journal of Structural Engineering, Volume 17, Number 10, Pages 3042-3063 (1991).
[153] Hebb D.O, The Organization of Behavior, Wiley, New York (1949).
[154] Herszberg I, Li H.C.H, Dharmawan F, A.P. Mouritz, M. Nguyen and J. Bayandor
”Damage assessment and monitoring of composite ship joints” Composite Struc-
tures, Volume 67, Issue 2, Pages 205-216 (2005).
[155] Highsmith A.L and Reifsnider K.L, Stiffness reduction mechanisms in composite
laminates. ASTM STP 115, Pages 103-117 (1982).
[156] Hison Cornelia, Giovanni Ausanio, Alberto C. Barone, Vincenzo Iannotti, Eufemia
Pepe and Luciano Lanotte ”Magnetoelastic sensor for real-time monitoring of elastic
deformation and fracture alarm” Sensors and Actuators A: Physical, Volume 125,
Issue 1, Pages 10-14 (2005).
[157] Ho, Y.K., and Ewins, D.J. ”Numerical Evaluation of the Damage Index,” Structural
Health Monitoring 2000, Stanford University, Palo Alto, California, Pages 995-1011
(2000).
[158] Ho, Y.K., and Ewins, D.J. ”On the Structural Damage Identification with Mode
Shapes,” European COST F3 Conference on System Identification and Structural
Health Monitoring, Madrid, Spain, Pages 677-686 (2000).
[159] Hollandsworth P. E and Busby H. R Impact force identification using the general
inverse technique International Journal of Impact Engineering. Volume 8, Issue 4 ,
Pages 315-322 (1989).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-344-320.jpg)
![References 317
[160] Hopfield, J.J. ”Neural Networks and Physical Systems with Emergent Collective
Computational Abilities”, Proceedings of the National Academy of Sciences, Volume
79, Pages 2554-2558 (1982).
[161] Hristoforou E ”Amorphous magnetostrictive wires used in delay lines for sensing
applications” Journal of Magnetism and Magnetic Materials Volume 249, Issues 1-2
, Pages 387-392 (2002).
[162] Hristoforou E, Chiriac H and J. N. Avaritsiotis ”Thin film thickness sensor based on
a new magnetostrictive delay line arrangement” Sensors and Actuators A: Physical
Volume 76, Issues1-3 , Pages 156-161 (1999).
[163] Huang H, J. Pan and P. G. McCormick Prediction of impact forces in a vibratory
ball mill using an inverse technique International Journal of Impact Engineering
Volume 19, Issue 2 , Pages 117-126 (1997).
[164] Hunt S R and I G Hebden ”Validation of the Eurofighter Typhoon structural health
and usage monitoring system” Smart Material Structure, Volume 10, Pages 497-503
(2001).
[165] Hurlebaus S and L. Gaul ”Smart structure dynamics” Mechanical Systems and
Signal Processing, Volume 20, Issue 2, Pages 255-281 (2006).
[166] Inoue Hirotsugu, John J Harrigan and Stephen R Reid Review of inverse analysis
for indirect measurement of impact force Appllied Mechanics Review, Volume 54,
Number 6, Pages 503-524 (2001).
[167] Iwasaki Atsushi, Akira Todoroki, Yoshinobu Shimamura and Hideo Kobayashi ”An
unsupervised statistical damage detection method for structural health monitor-
ing (applied to detection of delamination of a composite beam)” Smart Material
Structure 13 Pages 80-85 (2004).
[168] Jain Mahaveer K, Stefan Schmidt, Keat Ghee Ong, Casey Mungle and Craig A
Grimes ”Magnetoacoustic remote query temperature and humidity sensors” Smart
Material Structure, Volume 9, Pages 502-510 (2000).
[169] Jenkins, C. H., Kjerengtroen, L., and Oestensen, H. ”Sensitivity of Parameter
Changes in Structural Damage Detection,” Shock and Vibration, Volume 4, Number
1, Pages 27-37 (1997).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-345-320.jpg)
![318 References
[170] Johnson Timothy J, Chulho Yang, Douglas E Adams and Sam Ciray ”Embedded
sensitivity functions for characterizing structural damage”, Smart Material Struc-
ture, Volume 14 Pages 155-169 (2005).
[171] Joule J.P; Ann. Elec. Magn. Chem. Volume 8 , Page 219 (1842).
[172] Ju F.D, Akgun M, T.L. Paez, E.T. Wong, Diagnosis of fracture damage in simple
structures, Bureau of Engineering Research, Report No. CE-62(82) AFOSR-993-1,
University of New Mexico, Alburquerque, NM, (1982).
[173] Kang D.H, Kim C.U and C.G. Kim ”The embedment of fiber Bragg grating sensors
into filament wound pressure tanks considering multiplexing” NDT & E Interna-
tional,
[174] Kannan K S and A Dasgupta ”A nonlinear Galerkin finite-element theory for model-
ing magnetostrictive smart structures” Smart Material Structure, Volume 6, 341-350
(1997).
[175] Kao C. Y and Shih-Lin Hung ”Detection of structural damage via free vibration re-
sponses generated by approximating artificial neural networks” Computers & Struc-
tures, Volume 81, Issues 28-29, Pages 2631-2644 (2003).
[176] Kawiecki, G. ”Modal Damping Measurements for Damage Detection,” European
COST F3 Conference on System Identification and Structural Health Monitoring,
Madrid, Spain, Pages 651-658 (2000).
[177] Kawiecki Grzegorz ”Modal damping measurement for damage detection” Smart
Material Structure, Volume 10, Pages 466-471 (2001).
[178] Kessler, S.S., Spearing, S.M., Atala, M.J., Cesnik, C.E.S., and Soutis, C., Damage
Detection in Composite Materials Using Frequency Response Methods, Composites
Part B, Volume 33, (2002).
[179] Kessler Seth S, S Mark Spearing and Constantinos Soutis ”Damage detection in
composite materials using Lamb wave methods”, Smart Material Structure, Volume
11, Pages 269-278 (2002).
[180] Khedir, A.A. and Reddy, J.N. ”Free vibration of cross-ply laminated beams with ar-
bitrary boundary conditions” International Journal of Engineering Science, Volume
32, Number 12, Pages 1971-1980 (1994).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-346-320.jpg)
![References 319
[181] Khedir, A.A. and Reddy, J.N. ”An exact solution for the bending of thin and thick
cross-ply laminated beams” Composite Structures Volume 37, Pages 195-203 (1997).
[182] Khoo Lay Menn, P. Raju Mantena, and Prakash Jadhav ”Structural Damage As-
sessment Using Vibration Modal Analysis” Structural Health Monitoring, Volume
3, Pages 177-194 (2004).
[183] Kim Heung Soo, Anindya Ghoshal, Aditi Chattopadhyay, and William H. Prosser
Development of Embedded Sensor Models in Composite Laminates for Structural
Health Monitoring Journal of Reinforced Plastics and Composites, Volume 23, Pages
1207-1240 (2004).
[184] Kim J.O, Wang Y and H.H. Bau, ”The effect of an adjacent viscous fluid on the
transmission of torsional stress waves in a submerged waveguide” Journal Acoustic
Society America, Volume 89, Pages 1414-1422 (1991).
[185] Ko J.M and Ni Y.Q ”Technology developments in structural health monitoring of
large-scale bridges” Engineering Structures, Volume 27, Issue 12, Pages 1715-1725
(2005).
[186] Koh Y. L; Chiu W. K; N. Rajic; S. C. Galea ”Detection of Disbond Growth in a
Cyclically Loaded Bonded Composite Repair Patch Using Surface-mounted Piezoce-
ramic Elements” Structural Health Monitoring, Volume 2, Number 4, Pages 327-339
(2003)
[187] Koh S. J. A, M. Maalej, and S. T. Quek ”Damage Quantification of Flexurally
Loaded RC Slab Using Frequency Response Data” Structural Health Monitoring,
Volume 3, Pages 293-311 (2004).
[188] Kohonen, Teuvo ”Correlation Matrix Memories” IEEE Transaction on Computers,
C-21 Pages 353-359 (1972)
[189] Kohonen, T. ”Self-Organization and Associative Memory” Springer-Verlag, New
York (1984).
[190] Kondo K. ”Dynamic behaviour of Terfenol-D” Journal of Alloys and Compounds
Volume 258, Pages 56-60 (1997).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-347-320.jpg)
![320 References
[191] Kouchakzadeh, M.A. and Sekine, H.. ”Compressive buckling analysis of rectangu-
lar composite laminates containing multiple delaminations”, Composite Structures,
Volume 50, Pages 249-255 (2000).
[192] Krishna Murty, A. V., Anjanappa, M., Wang, Z. and Chen, X. ”Sensing of de-
laminations in composite laminates using embedded magnetostrictive particle lay-
ers”, Journal of Intelligent Material Systems Structures, Volume 10, Pages 825-835
(1999).
[193] Ktena A, Fotiadis D. I, Spanos P. D, Berger A and Massalas C. V ”Identification
of 1D and 2D Preisach models for ferromagnets and shape memory alloys” Physica
B: Condensed Matter, Volume 306, Issues 1-4, Pages 84-90 (2001).
[194] Ktena A, Fotiadis D. I, Spanos P. D and C. V. Massalas ”A Preisach model identi-
fication procedure and simulation of hysteresis in ferromagnets and shape-memory
alloys” Physica B: Condensed Matter, Volume 306, Issues 1-4, Pages 84-90 (2001).
[195] Kuang K. S. C, Quek S. T, Cantwell W. J ”Use of polymer-based sensors for moni-
toring the static and dynamic response of a cantilever composite beam” Journal of
Materials Science, Volume 39, Number 11, Pages 3839 - 3843
[196] Kuhlemeyer, R. L., Lysmer, J.: ”Finite element accuracy for wave propagation
problems”, Journal of Soil Mechanics Foundations Div., ASCE 99(SM5), Pages
421-427 (1973).
[197] Kullaa Jyrki ”Damage Detection Of The Z24 Bridge Using Control Charts” Me-
chanical Systems and Signal Processing, Volume 17, Issue 1, Pages 163-170 (2003).
[198] Kumar D. S, D. Roy Mahapatra and S. Gopalakrishnan ”A spectral finite element
for wave propagation and structural diagnostic analysis of composite beam with
transverse crack” Finite Elements in Analysis and Design, Volume 40, Issues 13-14,
Pages 1729-1751 (2004).
[199] Kumar D S, Roy Mahapatra D, Gopalakrishnan S. ”On the estimation accuracy
of dynamic fracture parameters in a transverse cracked composite beam from a
simplified wave-based diagnostic model” Structural Health Monitoring.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-348-320.jpg)
![References 321
[200] Kwun H, Bartels K.A and C. Dynes, ”Dispersion of longitudinal waves propagating
in liquid-filled cylindrical shells” Journal of Acoustic Society America, Volume 105,
Pages 2601-2611 (1999).
[201] Kwun H, Bartels K.A and Hanley J.J, ”Effects of tensile loading on the properties of
elastic-wave propagation in a strand” Journal of Acoustic Society America, Volume
103, Pages 3370-3375 (1998).
[202] Kwun H and Bartels K.A, ”Experimental observation of elastic-wave dispersion in
bounded solids of various configuration” Journal Acoustic Society America, Volume
99, Pages 962-968 (1996).
[203] Kwun H and Bartels K.A, ”Magnetostrictive sensor technology and its application”
Ultrasonics, Volume 36, Pages 171-178 (1998).
[204] Kwun H and Bartels K.A ”Experimental observation of wave dispersion in cylinder
shells via time-frequency analysis” Journal Acoustic Society America, Volume 97,
Pages 3905-3907 (1995).
[205] Kwun H and Teller C.M, ”Magnetostrictive generation and detection of longitudinal,
torsional, and flexural waves in a rod” Journal Acoustic Society America, Volume
96, Pages 1202-1204 (1994).
[206] Lakshminarayana K. and Jebaraj, C. ”Sensitivity analysis of local/global modal
parameters for identification of a crack in a beam”, Journal of Sound and Vibration,
Volume 228, Number 5, 977-994 (1999).
[207] Lallement G, Cogan S, ”Reconciliation between measured and calculated dynamic
behaviors: enlargement of knowledge space”, Proceedings of the 10th IMAC Con-
ference, San Diego, CA, 1992, Pages 487-493 (1992).
[208] Lam, H.F., Ko, J.M. and Wong, C.W. ”Localization of damaged structural connec-
tions based on experimental modal and sensitivity analysis”, Journal of Sound and
Vibration, Volume 210, Number 1, Pages 91-115 (1998).
[209] Lanotte Luciano, Giovanni Ausanioa, Cornelia Hisona, Vincenzo Iannottia and Ce-
sare Luponio ”The potentiality of composite elastic magnets as novel materials for
sensors and actuators” Sensors and Actuators A: Physical, Volume 106, Issues 1-3
, Pages 56-60 (2003).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-349-320.jpg)
![322 References
[210] Lau Kin-tak, Libo Yuan, Li-min Zhou, Jingshen Wu and Chung-ho Woo ”Strain
monitoring in FRP laminates and concrete beams using FBG sensors” Composite
Structures, Volume 51, Issue 1, Pages 9-20 (2001).
[211] Law S. S and Fang Y. L Moving force identification: optimal state estimation
approach Journal of Sound and Vibration Volume 239, Issue 2, Pages 233-254 (2001).
[212] Lee, J., Gurdal, Z. and Griffin, Jr.H. ”Layer-wise approach for the bifurcation prob-
lem in laminated composites with delaminations”, AIAA Journal, Volume 31, Num-
ber 2, Pages 331-338 (1993).
[213] Lee, J. ”Free vibration analysis of delaminated composite beams”, Computers and
Structures, Volume 74, Pages 121-129 (2000).
[214] Lee Eric W.M, H.F. Lam ”ANN-Based Structural Damage Diagnosis Using Mea-
sured Vibration Data” Lecture Notes in Computer Science Springer-Verlag GmbH
Volume 3215/2004 Page: 373 (2004).
[215] Lee Jong Jae, Jong Won Lee, Jin Hak Yi, Chung Bang Yun and Hie Young Jung
”Neural networks-based damage detection for bridges considering errors in baseline
finite element models” Journal of Sound and Vibration, Volume 280, Issues 3-5,
Pages 555 (2005).
[216] Lee S.J, J.N. Reddy, F. Rostam-Abadi ”Transient analysis of laminated compos-
ite plates with embedded smart-material layers” Finite Elements in Analysis and
Design, Volume 40, Pages 463-483 (2004).
[217] Lee J.W and Daniel I.M, Progressive cracking of cross-ply composite lami-
nates.Journal of Composite Materials Volume 24, Pages 1225-1243 (1990).
[218] Lee H.P and T.Y. Ng, Natural frequencies and modes for the flexural vibration of
a cracked beam, Applied Acoustics 42, Pages 151-163 (1994).
[219] Leng Jinsong and Anand Asundi ”Structural health monitoring of smart composite
materials by using EFPI and FBG sensors” Sensors and Actuators A: Physical,
Volume 103, Issue 3, Pages 330-340 (2003).
[220] L´onard, F., Lanteigne, J., Lalonde, S. and Turcotte, Y. ”Free-vibration behaviour
e
of a cracked cantilever beam and crack detection”, Mechanical Systems and Signal
Processing, Volume 15, Number 3, Pages 529-548 (2001).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-350-320.jpg)
![References 323
[221] Leong W H, Staszewski W J, B C Lee and F Scarpa ”Structural health monitoring
using scanning laser vibrometry: III. Lamb waves for fatigue crack detection” Smart
Material Structure, Volume 14, Pages 1387-1395 (2005).
[222] Lestari Wahyu and Pizhong Qiao ”Damage detection of fiber-reinforced polymer
honeycomb sandwich beams” Composite Structures, Volume 67, Issue 3, Pages 365-
373 (2005).
[223] Li Z. X, Chan T. H. T and J. M. Ko ”Determination of effective stress range and its
application on fatigue stress assessment of existing bridges” International Journal
of Solids and Structures, Volume 39, Issue 9, Pages 2401-2417 (2002).
[224] Li Z. X, Chan T. H. T and J. M. Ko ”Evaluation of typhoon induced fatigue damage
for Tsing Ma Bridge” Engineering Structures, Volume 24, Issue 8, Pages 1035-1047
(2002).
[225] Li Z. X, Chan T. H. T and J. M. Ko ”Fatigue analysis and life prediction of bridges
with structural health monitoring data - Part I: methodology and strategy” Inter-
national Journal of Fatigue, Volume 23, Issue 1, Pages 45-53 (2001).
[226] Li Z. X, Chan T. H. T and R. Zheng ”Statistical analysis of online strain response
and its application in fatigue assessment of a long-span steel bridge” Engineering
Structures, Volume 25, Issue 14, Pages 1731-1741 (2003).
[227] Li Hong-Nan, Dong-Sheng Li and Gang-Bing Song ”Recent applications of fiber op-
tic sensors to health monitoring in civil engineering” Engineering Structures, Volume
26, Issue 11, Pages 1647-1657 (2004).
[228] Lihua S, Boaqi T. ”Identification of external force acting on a plate by using neural
networks”, In: Chang F-K, editor. Proceedings of the International Workshop on
Structural Health Monitoring, Stanford University, Stanford, CA, 18-28 September,
Pages 229-237 (1997).
[229] Lim, T.W. and Kashangaki, T.A.L. ”Structural damage detection of space truss
structures using best achievable eigen vectors”, AIAA Journal, Volume 32, Number
5, 1049-1057 (1994).
[230] Lin ”Location of Modeling Errors Using Modal Test Data,” AIAA Journal, Volume
28, Pages 1650-1654 (1990).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-351-320.jpg)
![324 References
[231] Lin, C. ”Unity Check Method for Structural Damage Detection,” Journal of Space-
craft and Rockets, Volume 35, Number 4, Pages 577-579 (1998).
[232] Lin Mark and Fu-Kuo Chang ”Composite structures with built-in diagnostics” Ma-
terials Today Volume 2 Issue 2 (1999).
[233] Lindgren E.A et al., Journal of Applied Physics, Volume 83, Pages 7282 (1998).
[234] Ling Hang-Yin, Kin-Tak Lau and Li Cheng ”Determination of dynamic strain profile
and delamination detection of composite structures using embedded multiplexed
fibre-optic sensors” Composite Structures, Volume 66, Issues 1-4, Pages 317-326
(2004).
[235] Ling Zhao; Harry W. Shenton ”Structural Damage Detection using Best Approxi-
mated Dead Load Redistribution” Structural Health Monitoring, Volume 4, Number
4, Pages 319-339 (2005)
[236] Loewy, R.G. ”Recent developments in smart structures with aeronautical applica-
tions” Smart Materials and Structures,Volume 6, Pages 11-42 (1997).
[237] Lopes, V. Jr., Pereira, J.A., and Inman, D.J. ”Structural FRF Acqisition via Elec-
tric Impedance Measurement Applied to Damage Location,” Proceedings of SPIE,
Volume 4062, Pages 1549-1555 (2000).
[238] Luo, H. and Hanagud, S. ”Dynamics of delaminated beams”, International Journal
of Solids and Structures, Volume 37, Pages 1501-1519 (2000).
[239] Ma C. K, Chang J. M and D. C. Lin Input forces estimation of beam structures
by an inverse method Journal of Sound and Vibration, Volume 259, Issue 2, Pages
387-407 (2003).
[240] Ma Chih Kao and C. C.Chih Chergn Ho An inverse method for the estimation of
input forces acting on non-linear structural systems Journal of Sound and Vibration,
Volume 275, Issues 3-5, Pages 953-971 (2004).
[241] Maalej M, Ahmed S.F.U, K.S.C. Kuang, and P. Paramasivam ”Fiber Optic Sensing
for Monitoring Corrosion-Induced Damage” Structural Health Monitoring, Volume
3, Pages 165-176 (2004).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-352-320.jpg)
![References 325
[242] Macdonald John H.G and Wendy E. Daniell ”Variation of modal parameters of a
cable-stayed bridge identified from ambient vibration measurements and FE mod-
eling” Engineering Structures, Volume 27, Issue 13, Pages 1916-1930 (2005).
[243] Maeck, J., and De Roeck, G. ”Damage Detection on a Prestressed Concrete Bridge
and RC Beams Using Dynamic System Identification,” Damage Assessment of
Structures, Proceedings of the International Conference on Damage Assessment
of Structures (DAMAS 99), Dublin, Ireland, Pages 320-327 (1999).
[244] Mahapatra, D Roy and Gopalakrishnan, S. ”An active spectral element model for
PID feedback control of wave propagation in composite beams”, Proc. 1st Interna-
tional Conference on Vibration Engineering and Technology of Machinery, Banga-
lore, India, Oct 25-27 (2000).
[245] Mahapatra D R , ”Development of spectral finite element models for wave propaga-
tion studies, health monitoring and active control of waves in laminated composite
structures”, Indian Institute of Science, Bangalore Ph.D. Thesis, (2003).
[246] Mahapatra D. P. Roy, S. Gopalakrishnan, B. Balachandran; ”Active feedback con-
trol of multiple waves in helicopter gearbox support struts” Smart meterials and
structures, Volume 10, Pages 1046-1058 (2001).
[247] Mahapatra D. Roy and S. Gopalakrishnan ”Spectral finite element analysis of cou-
pled wave propagation in composite beams with multiple delaminations and strip
inclusions” International Journal of Solids and Structures, Volume 41, Issues 5-6,
Pages 1173-1208 (2004).
[248] Mahapatra, D. R., Gopalakrishnan, S. ”A spectral finite element for analysis
of axial-flexural-shear coupled wave propagation in laminated composite beams”,
Composite Structures, Volume 59, Number 1, Pages 67-88 (2003).
[249] Mahapatra, D. R., Gopalakrishnan, S., Shankar, T. S. ”Spectral-element-based so-
lution for wave propagation analysis of multiply connected unsymmetric laminated
composite beams” Journal of Sound and Vibration, Volume 237, Number 5, Pages
819-836 (2000).
[250] Mahapatra, D. R., Gopalakrishnan, S.: ”A spectral finite element for analysis of
wave propagation in uniform composite tubes”, Journal of Sound and Vibration,
Volume 268, Number 3, Pages 429-463 (2003).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-353-320.jpg)
![326 References
[251] Majumdar, P.M. and Suryanarayan, S. ”Flexural vibration of beams with delam-
ination”, Journal of Sound and Vibration, Volume 25, Number 3, Pages 441-461
(1988).
[252] Mal Ajit, Fabrizio Ricci, Sauvik Banerjee, and Frank Shih ”A Conceptual Structural
Health Monitoring System based on Vibration and Wave Propagation” Structural
Health Monitoring, Volume 4, Pages 283-293 (2005).
[253] Manassis Christos, Dimitrios Bargiotas and Vassilios Karagiannis ”Optimized dis-
tributed field sensor based on magnetostrictive delay lines” Sensors and Actuators
A: Physical, Volume 106, Issues 1-3 , Pages 30-33 (2003).
[254] Martin M. T and Doyle, J. F. Impact force identification from wave propagation
responses International Journal of Impact Engineering, Volume 18, Issue 1, Pages
65-77 (1996).
[255] Martin W. N, Jr., A. Ghoshal, M. J. Sundaresan, G. L. Lebby, P. R. Pratap, and M.
J. Schulz ”An Artificial Neural Receptor System for Structural Health Monitoring”
Structural Health Monitoring, Volume 4, Pages 229-245 (2005).
[256] Martin, M., Gopalakrishnan, S., Doyle, J. F. ”Wave propagation in multiply con-
nected deep waveguides”, Journal of Sound and Vibration, Volume 174, Number 4,
Pages 521-538 (1994).
[257] Masri S.F, Nakamura M, Chassiakos A.G, T.K. Caughey, ”Neural network approach
to detection of changes in structural parameter”, Journal of Engineering Mechanics,
Volume 122, Number 4, Pages 350-360 (1996).
[258] Mateucci C; Ann. Chim. Phys. Volume 53 , Pages 358 (1858).
[259] Mattson Steven G and Sudhakar M. Pandit ”Statistical moments of autoregressive
model residuals for damage localization” Mechanical Systems and Signal Processing,
[260] Maugin G. A, ”Nonlinear electromechanical effects and applications” World Scien-
tific, (1985)
[261] Mayes, R.L., An Experimental Algorithm for Detecting Damage Applied to the I-40
Bridge over the Rio Grande, in Proc. 13th International Modal Analysis Conference,
219-225 (1995).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-354-320.jpg)
![References 327
[262] McAdam G, Newman P. J, McKenzie I, C. Davis, and B. R. W. Hinton ”Fiber Optic
Sensors for Detection of Corrosion within Aircraft.” Structural Health Monitoring,
Volume 4, Pages 47-56 (2005).
[263] McCartney L.N, Theory of stress transfer in a [0/90/0] cross-ply laminate containing
a parallel array of transverse cracks. Journal of Mechanics and Physics of Solids
Volume 40 1, Pages 27-68 (1992).
[264] McCartney L.N, The prediction of cracking in biaxially loaded cross-ply laminates
having brittle matrices. Composites Volume 24 2, Pages 84-92 (1993).
[265] McCulloch, W. S. and Pitts, W. H. . ”A logical calculus of the ideas immanent
in nervous activity” Bulletin of Mathematical Biophysics, Volume 5 Pages 115-133
(1943).
[266] Mickens T, Schulz M, Sundaresan M, A. Ghoshal, A. S. Naser and R. Reichmei-
der ”Structural Health Monitoring Of An Aircraft Joint” Mechanical Systems and
Signal Processing, Volume 17, Issue 2, Pages 285-303 (2003).
[267] Mikhail Prokopenko, Peter Wang, Andrew Scott, Vadim Gerasimov, Nigel Hoschke,
Don Price ”On Self-organising Diagnostics in Impact Sensing Networks” Lecture
Notes in Computer Science Springer-Verlag GmbH, Volume 3684/2005 Page: 170
(2005).
[268] Mitra Mira, Gopalakrishnan S, and Bhat M Seetharama; ”A new super convergent
thin walled composite beam element for analysis of box beam structures”, Interna-
tional Journal of Solids and Structures, Volume 41, Pages 1491-1518 (2004).
[269] Mitra Mira and Gopalakrishnan S ”Extraction of wave characteristics from wavelet-
based spectral finite element formulation” Mechanical Systems and Signal Process-
ing,
[270] Mitra Mira and Gopalakrishnan S ”Wavelet based spectral finite element for analysis
of coupled wave propagation in higher order composite beams” Composite Struc-
tures,
[271] Mitra, Mira and Gopalakrishnan, S Spectrally formulated wavelet finite element
for wave propagation and impact force identification in connected 1-D waveguides.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-355-320.jpg)
![328 References
International Journal of Solids and Structures, Volume 42, Number (16-17), Pages
4695-4721 (2005).
[272] Modena, C., Sonda, D., and Zonta, D. ”Damage Localization in Reinforced Concrete
Structures by Using Damping Measurements,” Damage Assessment of Structures,
Proceedings of the International Conference on Damage Assessment of Structures
(DAMAS 99), Dublin, Ireland, Pages 132-141 (1999).
[273] Moffett M B, Clark A E, Wun-Fogle M, Linberg J, Teter J P and McLaughlin
E A ”Characterization of terfenol-d for magnetostrictive transducers” Journal of
Acoustic Society America, Volume 89, Pages 1448-1455.
[274] Mooney M. A, P. B. Gorman, and J. N. Gonzalez ”Vibration-based Health Moni-
toring of Earth Structures” Structural Health Monitoring, Volume 4, Pages 137-152
(2005).
[275] Mottershead J.E, ”On the zeros of structural frequency response functions and their
application to model assessment and updating”, Proceedings of the 16th Interna-
tional Modal Analysis Conference, Santa Barbara, CA, 1998, Pages 500-503 (1998).
[276] Moyo P and Brownjohn J. M. W ”Detection Of Anomalous Structural Behaviour
Using Wavelet Analysis” Mechanical Systems and Signal Processing, Volume 16,
Issues 2-3, Pages 429-445 (2002).
[277] Moyo Pilate; James M W Brownjohn ”Application of Box-Jenkins Models for As-
sessing the Effect of Unusual Events Recorded by Structural Health Monitoring Sys-
tems.” Structural Health Monitoring, Volume 1, Number 2, Pages 149-160 (2002).
[278] Moyo P, J.M.W. Brownjohn, R. Suresh and S.C. Tjin ”Development of fiber Bragg
grating sensors for monitoring civil infrastructure” Engineering Structures, Volume
27, Issue 12, Pages 1828-1834 (2005).
[279] Mufti Aftab A ”Structural Health Monitoring of Innovative Canadian Civil En-
gineering Structures.” Structural Health Monitoring, Volume 1, Number 1, Pages
89-103 (2002).
[280] Murayama Hideaki, Kazuro Kageyama, Toru Kamita, Hirotaka Igawa ”Structural
health monitoring of a full-scale composite structure with fiber-optic sensors” Ad-
vanced Composite Materials, Volume 11, Number 3 Pages 287-297.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-356-320.jpg)
![References 329
[281] Murayama R, ”Driving mechanism on magnetostrictive type electromagnetic acous-
tic transducer for symmetrical vertical-mode Lamb wave and for shear horizontal-
mode plate wave” Ultrasonics, Volume 34, Pages 729-736 (1996).
[282] Murayama R, ”Study of driving mechanism on electromagnetic acoustic transducer
for Lamb wave using magnetostrictive effect and application in drawability evalua-
tion of thin steel sheet.” Ultrasonics, Volume 37, Pages 31-38 (1999).
[283] Murthy M. V. V. S, D. Roy Mahapatra, K. Badarinarayana and S. Gopalakrishnan;
”A refined higher order finite element for asymmetric composite beams” Composite
Structures
[284] Nag A, D Mahapatra, S Gopalakrishnan ”Identification of Delamination in a Com-
posite Beam Using a Damaged Spectral Element” Structural Health Monitoring,
Volume 1, Number 1, Pages 105-125 (2002).
[285] Nag A, D. Roy Mahapatra, S. Gopalakrishnan and T. S. Sankar ”A spectral finite
element with embedded delamination for modeling of wave scattering in composite
beams” Composites Science and Technology, Volume 63, Issue 15, Pages 2187-2200
(2003).
[286] Nakamura Yoshiya, Masanao Nakayama, Keiji Masuda, Kiyoshi Tanaka, Masashi
Yasuda and Takafumi Fujita ”Development of active six-degrees-of-freedom mi-
crovibration control system using giant magnetostrictive actuators” Smart Material
Structure, Volume 9, Pages 175-185 (2000).
[287] Narkis Y, Identification of crack location in vibrating simply supported beams,
Journal of Sound and Vibration 172, Pages 549-558 (1994).
[288] Natale C, Velardib F and Visonec C ”Identification and compensation of Preisach
hysteresis models for magnetostrictive actuators” Physica B: Condensed Matter,
Volume 306, Issues 1-4 , Pages 161-165 (2001).
[289] Nataraju Madhura, Douglas E. Adams, and Elias J. Rigas ”Nonlinear Dynamical
Effects and Observations in Modeling and Simulating Damage Evolution in a Can-
tilevered Beam” Structural Health Monitoring, Volume 4, Pages 259-282 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-357-320.jpg)
![330 References
[290] Ni Y.Q, X.G. Hua, K.Q. Fan and J.M. Ko ”Correlating modal properties with tem-
perature using long-term monitoring data and support vector machine technique”
Engineering Structures, Volume 27, Issue 12, Pages 1762-1773 (2005).
[291] Nicholson D. W, Alnefaie K. A ”Modal moment index for damage detection in beam
structures” Acta Mechanica Volume 144, Numbers 3-4 Pages 155 - 167
[292] Nojavan Saeed and Fuh-Gwo Yuan ”Damage imaging of reinforced concrete struc-
tures using electromagnetic migration algorithm” International Journal of Solids
and Structures,
[293] Nuismer R.J and Tan S.C, Constitutive relations of a cracked composite lamina.
Journal of Composite Materials Volume 22, Pages 306-321 (1988).
[294] Nyongesa Henry O, Andrew W. Otieno and Paul L. Rosin ”Neural fuzzy analysis of
delaminated composites from shearography imaging” Composite Structures, Volume
54, Issues 2-3, Pages 313-318 (2001).
[295] Odeen S and Lundberg B Prediction of impact force by impulse response method
International Journal of Impact Engineering, Volume 11, Issue 2, Pages 149-158
(1991).
[296] Oduncu H, and Meydan T; ”A novel method of monitoring biomechanical move-
ments using the magnetoelastic effect”; Journal of Magnetism and Magnetic Mate-
rials; Volume 160, Pages 233-236 (1996).
[297] Ogin S.L, Smith P.A and Beaumont P.W.R, Matrix cracking and stiffness reduction
during the fatigue of a (0/90)s GFRP laminates.Composites Science and Technology
Volume 22, Pages 23-31 (1985).
[298] Omenzetter Piotr, James Mark William Brownjohn and Pilate Moyo ”Identification
of unusual events in multi-channel bridge monitoring data” Mechanical Systems and
Signal Processing, Volume 18, Issue 2, Pages 409-430 (2004).
[299] Onoe M, ”Theory of ultrasonic delay lines for direct-current pulse transmission”
Journal Acoustic Society America, Volume 34, Pages 1247-1254 (1962).
[300] Pagano, N.J. ”Interlaminar response of composite materials”, Composite Materials
Series 5, (1989).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-358-320.jpg)
![References 331
[301] Pan E, and Heyliger P. R ”Exact solutions for magneto-electro-elastic laminates
in cylindrical bending” International Journal of Solids and Structures, Volume 40,
Issue 24 , Pages 6859-6876 (2003).
[302] Pandey, A.K., and M. Biswas, Damage Detection in Structures Using Changes in
Flexibility, Journal of Sound and Vibration, Volume 169, Number 1, Pages 3-17
(1994).
[303] Pandey, A.K., M. Biswas, and M.M. Samman, Damage Detection from Changes in
Curvature Mode Shapes, Journal of Sound and Vibration, Volume 145, Number 2,
Pages 321-332 (1991).
[304] Park G and Inman D. J ”Smart bolts: an example of self-healing structures” Smart
Materials Bulletin, Volume 2001, Issue 7, Pages 5-8 (2001).
[305] Park Gyuhae; Hoon Sohn; Charles R. Farrar; Daniel J. Inman ”Overview of Piezo-
electric Impedance-Based Health Monitoring and Path Forward.” The Shock and
Vibration Digest, Volume 35, Number 6, Pages 451-463 (2003).
[306] Parloo E, Verboven P, Guillaume P and M. Van Overmeire ”Autonomous Structural
Health Monitoring-Part Ii: Vibration-Based In-Operation Damage Assessment” Me-
chanical Systems and Signal Processing, Volume 16, Issue 4, Pages 659-675 (2002).
[307] Pasquale M, Infortuna A, Martino L, Sasso C, Beatrice C and Lim S. H ”Mag-
netic properties of TbFe thin films under applied stress;” Journal of Magnetism and
Magnetic Materials; Volumes 215-216, Pages 769-771 (2000).
[308] Patjawit Anun and Worsak Kanok-Nukulchai ”Health monitoring of highway
bridges based on a Global Flexibility Index” Engineering Structures, Volume 27,
Issue 9, Pages 1385-1391 (2005).
[309] Pelinescu I and Balachandran B ”Analytical study of active control of wave trans-
mission through cylindrical struts”, Smart Material Structure, Volume 10, Pages
121-136 (2001).
[310] Peyt M, ”Introduction to Finite Element Analysis” Cambridge University Press,
New York, (1990).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-359-320.jpg)
![332 References
[311] Pradhan S C, Ng T Y, Lam K Y and Reddy J N ”Control of laminated composite
plates using magnetostrictive layers”, Smart Material Structure, Volume 10, Pages
657-667 (2001).
[312] Mahadev Prasad S, Krishnan Balasubramaniam and C V Krishnamurthy ”Struc-
tural health monitoring of composite structures using Lamb wave tomography”,
Smart Material Structure, Volume 13, Pages 73-79 (2004).
[313] Pratap G. ”The finite element method in structural mechanics” Kluwer Academic
Publishers (1993).
[314] Prathap G and Bhashyam G.R, ”Reduced integration and the shear-flexible beam
element” International Journal Numerical Methods Engineering, Volume 18, Pages
195-210 (1982).
[315] Purekar, A.S. and Pines, D.J. ”Detecting damage in non-uniform beams using the
dereververated transfer function response”, Smart Materials and Structures, Volume
9, Pages 429-444 (2000).
[316] Qian Wu, Liu G R, Chun Lu and Lam K Y ”Active vibration control of compos-
ite laminated cylindrical shells via surface-bonded magnetostrictive layers”, Smart
Material Structure, Volume 12, Pages 889-897 (2003).
[317] Qing Xinlin, Amrita Kumar, Chang Zhang, Ignacio F Gonzalez, Guangping Guo and
Fu-Kuo Chang ”A hybrid piezoelectric/fiber optic diagnostic system for structural
health monitoring”, Smart Material Structure, Volume 14, Pages 98-103 (2005).
[318] Ragusa Carlo ”An analytical method for the identification of the Preisach distribu-
tion function”, Journal of Magnetism and Magnetic Materials, Volumes 254-255 ,
Pages 259-261 (2003).
[319] Ramanujam Narayanan, Toshio Nakamura, Masataka Urago ”Identification of em-
bedded interlaminar flaw using inverse analysis” International Journal of Fracture;
Volume 132, Number 2, Pages 153 - 173.
[320] Ratcliffe, C.P. ”Damage detection using a modified Laplacian operator on mode
shape data”, Journal of Sound and Vibration, Volume 204, Number 3, Pages 505-
517 (1997).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-360-320.jpg)
![References 333
[321] Ratcliffe, C.P. and Bagaria, W.J. ”Vibration Technique for Locating Delamination
in a Composite Beam”, AIAA Journal, Volume 36, Number 6, Pages 1074-1077
(1998).
[322] Ratcliffe, C.P. ”Determination of crack location in beams using natural frequencies”,
Journal of Sound and Vibration, Volume 247, Number 3, Pages 417-429 (2000).
[323] Rayleigh Lord, Philos. Mag. Volume 23, Pages 225 (1887).
[324] Reddy, J.N. ”Mechanics of laminated composite plates”, CRC Press, USA, (1997).
[325] Reddy J.N, ”On locking-free shear deformable beam finite elements.” Computer
Methods Applied Mechanics Engineering, Volume 149, Pages 113-132 (1997).
[326] Reddy J N and Barbosa J I ”On vibration suppression of magnetostrictive beams”,
Smart Material Structure, Volume 9, Pages 49-58 (2000).
[327] Reich, G.W., and Park, K.C. ”Experimental Applications of a Structural Health
Monitoring Methodology,” Smart Structures and Materials : Smart Systems for
Bridges, Structures, and Highways, Proceedings of SPIE, Volume 3988, Newport
Beach, California, Pages 143-153 (2000).
[328] Rhim J, Lee S. W ”A neural network approach for damage detection and identifi-
cation of structures” Computational Mechanics; Volume 16, Number 6, Pages 437
- 443.
[329] Ritdumrongkul Sopon, Masato Abe, Yozo Fujino and Takeshi Miyashita ”Quan-
titative health monitoring of bolted joints using a piezoceramic actuator-sensor”,
Smart Material Structure, Volume 13, Pages 20-29 (2004).
[330] Rizzi, S. A.; Doyle, J. F. ”Force identification for impact of a layered system” Com-
putational aspects of Contact, impact and penetration, Elmepress International,
Pages 222-241 (1991).
[331] Rosalie C, Chan A, Chiu W.K, S.C. Galea, F. Rose and N. Rajic ”Structural health
monitoring of composite structures using stress wave methods” Composite Struc-
tures, Volume 67, Issue 2, Pages 157-166 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-361-320.jpg)
![334 References
[332] Rosalie S. C, Vaughan M, A. Bremner and W. K. Chiu ”Variation in the group
velocity of Lamb waves as a tool for the detection of delamination in GLARE alu-
minium plate-like structures” Composite Structures, Volume 66, Issues 1-4, Pages
77-86 (2004).
[333] Rosenblatt, Frank, ”The Perceptron: A Probabilistic Model for Information Storage
and Organization in the Brain” Psychological Review, Volume 65, Number 6, Pages
386-408 (1958).
[334] Rumelhart, D.E., Hinton, G.E. and Williams, R.J., ”Learning representations by
back propagation error.” Nature, Volume 323, Pages 533-536 (1986).
[335] Saidha Eslavath; G. Narayana Naik; S. Gopalkrishnan ”An Experimental Investi-
gation of a Smart Laminated Composite Beam with a Magnetostrictive Patch for
Health Monitoring Applications.” Structural Health Monitoring, Volume 2, Number
4, 273-292 (2003)
[336] Saito Akihiko, Ken-ichi Yamamoto and Kazunori Yamane; ”Decrease of magneti-
zation in positive magnetostrictive material due to tensile stress”; Journal of Mag-
netism and Magnetic Materials; Volume 112, Issues 1-3, Pages 17-19 (1992).
[337] Sankar, B.V. and Zhu, H. ”The effect of stitching on the low-velocity impact re-
sponse of delaminated composite beams”, Composite Science and Technology, Vol-
ume 60, Pages 2681-2691 (2000).
[338] Schulz, M.J., Naser, A.S., Thyagarajan, S.K., Mickens, T., and Pai, P.F. ”Struc-
tural Health Monitoring Using Frequency Response Functions and Sparse Measure-
ments,”Proceedings of the International Modal Analysis Conference, Pages 760-766
(1998).
[339] Shen M and C. Pierre, Natural modes of Bernoulli-Euler beams with symmetric
cracks, Journal of Sound and Vibration 138, Pages 115-134 (1990).
[340] Shen M and C. Pierre, Free vibrations of beams with a single-edge crack, Journal
of Sound and Vibration 170, Pages 237-259 (1994).
[341] Smyth Andrew W, Sami F. Masri, Elias B. Kosmatopoulos, Anastassios G. Chas-
siakos and Thomas K. Caughey ”Development of adaptive modeling techniques for](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-362-320.jpg)
![References 335
non-linear hysteretic systems” International Journal of Non-Linear Mechanics, Vol-
ume 37, Issue 8, Pages 1435-1451 (2002).
[342] Sodano Henry A, Gyuhae Park and Daniel J. Inman ”An investigation into the
performance of macro-fiber composites for sensing and structural vibration appli-
cations”, Mechanical Systems and Signal Processing, Volume 18, Issue 3, Pages
683-697 (2004).
[343] Stanbridge, A.B., Khan, A.Z., and Ewins, D.J. ”Fault Identification in Vibrating
Structures Using a Scanning Laser Doppler Vibrometer,” Structural Health Moni-
toring, Current Status and Perspectives, Stanford University, Palo Alto, California,
Pages 56-65 (1997).
[344] Staszewski W. J ”Intelligent signal processing for damage detection in composite
materials” Composites Science and Technology, Volume 62, Issues 7-8, Pages 941-
950 (2002).
[345] Staszewski W J, B C Lee, L Mallet and F Scarpa ”Structural health monitoring
using scanning laser vibrometry: I. Lamb wave sensing” Smart Material Structure,
Volume 13, Pages 251-260 (2004).
[346] Stevens K.K, Force identification problems-an overview Proceedings of the 1987
SEM Spring Conference on Experimental Mechanics, Houston, TX, USA, Pages
14-19 (1987).
[347] Stolarski H.K and Chiang M.Y.M, ”Assumed strain formulation for triangular C 0
plate elements based on a weak form of the Kirchhoff constraints”, International
Journal of Numerical Methods Engineering, Volume 28, Pages 2323-2338 (1989).
[348] Su Zhongqing and Lin Ye ”A fast damage locating approach using digital damage
fingerprints extracted from Lamb wave signals”, Smart Material Structure, Volume
14, Pages 1047-1054 (2005).
[349] Su Zhongqing and Lin Ye ”Quantitative Damage Prediction for Composite Lam-
inates Based on Wave Propagation and Artificial Neural Networks”, Structural
Health Monitoring, Volume-4, Pages 57-66 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-363-320.jpg)
![336 References
[350] Su Zhongqing and Lin Ye ”Lamb wave-based quantitative identification of delami-
nation in CF/EP composite structures using artificial neural algorithm” Composite
Structures, Volume 66, Issues 1-4, Pages 627-637 (2004).
[351] Su Zhongqing and Lin Ye ”An intelligent signal processing and pattern recognition
technique for defect identification using an active sensor network”, Smart Material
Structure, Volume 13, Pages 957-969 (2004).
[352] Su Zhongqing, Lin Ye and Xiongzhu Bu ”A damage identification technique for
CF/EP composite laminates using distributed piezoelectric transducers” Composite
Structures, Volume 57, Issues 1-4, Pages 465-471 (2002).
[353] Subramanian P ”Vibration suppression of symmetric laminated composite beams”,
Smart Material Structure, Volume 11, Pages 880-885 (2002).
[354] Sun Weixiang, Jin Chen, Xing Wu, Fucai Li, Guicai Zhang, GM Dong ”Early Loos-
ening Fault Diagnosis of Clamping Support Based on Information Fusion” Lecture
Notes in Computer Science Springer-Verlag GmbH Volume 3498/2005 Page: 603
(2005).
[355] Sundaresan Mannur J; Anindya Ghoshal; Jia Li; Mark J. Schuz; P. Frank Pai;
Jaycee H. Chung ”Experimental Damage Detection on a Wing Panel Using Vibra-
tion Deflection Shapes.”
[356] Sundaresan M. J, P. F. Pai, A. Ghoshal, M. J. Schulz, F. Ferguson and J. H.
Chung ”Methods of distributed sensing for health monitoring of composite material
structures” Composites Part A: Applied Science and Manufacturing, Volume 32,
Issue 9, Pages 1357-1374 (2001).
[357] Suresh Rupali, Swee Chuan Tjin and Nam Quoc Ngo ”Application of a new fiber
Bragg grating based shear force sensor for monitoring civil structural components”,
Smart Material Structure, Volume 14, Pages 982-988 (2005).
[358] Szewezyk P, Hajela P, ”Damage detection in structures based on feature-sensitive
neural networks” Journal of Computers in Civil Engineering, Transactions of Amer-
ican Society of Civil Engineering, Volume 8, Number 2, Pages 163-178 (1994).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-364-320.jpg)
![References 337
[359] Taha M.M. Reda and J. Lucero ”Damage identification for structural health mon-
itoring using fuzzy pattern recognition” Engineering Structures, Volume 27, Issue
12, Pages 1774-1783 (2005).
[360] Takeda Nobuo ”Summary report of the structural health-monitoring project for
smart composite structure systems” Advanced Composite Materials, Volume 10,
Numbers 2-3, Pages 107 - 118
[361] Takeda Nobuo ”Structural health monitoring for smart composite structure systems
in Japan” Annales de Chimie Science des Matriaux, Volume 25, Issue 7, Pages 545-
549 (2000).
[362] Takeda Nobuo ”Characterization of microscopic damage in composite laminates
and real-time monitoring by embedded optical fiber sensors” International Journal
of Fatigue, Volume 24, Issues 2-4, Pages 281-289 (2002).
[363] Talreja R, Transverse cracking and stiffness reduction in composite laminates. Jour-
nal of Composite Materials Volume 19, Pages 355-375 (1985).
[364] Talreja R, Transverse cracking and stiffness reduction in cross-ply laminates of dif-
ferent matrix toughness. Journal of Composite Materials Volume 26 11, Pages 1644-
1663 (1992).
[365] Tennyson R C, Mufti A A, S Rizkalla, G Tadros and B Benmokrane ”Structural
health monitoring of innovative bridges in Canada with fiber optic sensors”, Smart
Material Structure, Volume 10, Pages 560-573 (2001).
[366] Tessler Alexander and Jan L. Spangler ”A least-squares variational method for full-
field reconstruction of elastic deformations in shear-deformable plates and shells”
Computer Methods in Applied Mechanics and Engineering, Volume 194, Issues 2-5,
Pages 327-339 (2005).
[367] Todoroki Akira, Takeuchi Yusuke, Yoshinobu Shimamura, Atushi Iwasaki, and
Tsuneya Sugiya ”Fracture Monitoring System of Sewer Pipe with Composite Frac-
ture Sensors Via the Internet”, Structural Health Monitoring, Volume 3, Pages 5-17
(2004).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-365-320.jpg)
![338 References
[368] Topole, K. ”Damage Evaluation via Flexibility Formulation,” Smart Systems for
Bridges, Structures, and Highways, Proceedings of SPIE, Volume 3043, Pages 145-
154 (1997).
[369] Toupin Richard A; ”The elastic Dielectric”, Journal of Rational Mechanics and
Analysis, Volume 5, Number 6, Pages 849-915 (1956).
[370] Toyama N, Noda J and Okabe T ”Quantitative damage detection in cross-ply lam-
inates using Lamb wave method” Composites Science and Technology, Volume 63,
Issue 10, Pages 1473-1479 (2003).
[371] Tracy, J.J. and Pardoen, G.C. ”Effect of delamination on the natural frequencies of
composite laminates”, Journal of Composite Materials, Volume 23, Pages 1200-1215
(1989).
[372] Trendafilova, I. ”Damage Detection in Structures from Dynamic Response Measure-
ments. An Inverse Problem Perspective,” Modeling and Simulation Based Engineer-
ing, Technical Science Press, Pages 515-520 (1998).
[373] Tsai C.Z, Wu E and B.H. Luo , ”Forward and inverse analysis for impact on sand-
wich panels” AIAA Journal, Volume 36, Number 11, Pages 2130-2136 (1998).
[374] Tsuda H, Toyama N, and Takatsubo J ”Damage detection of CFRP using fiber
Bragg gratings” Journal of Materials Science; Volume 39, Number 6, Pages 2211-
2214.
[375] Tzannes N.S, ”Joule and Wiedemann effects the simultaneous generation of longi-
tudinal and torsional stress pulses in magnetostrictive materials” IEEE Trans. Son.
Ultrason. SU-13, Page 3341 (1966).
[376] Uhl Tadeusz ”Identification of modal parameters for nonstationary mechanical sys-
tems” Archive of Applied Mechanics; Volume 74, Numbers 11-12 Pages 878 - 889
[377] Vanlanduit S, Verboven P and Guillaume P ”On-line detection of fatigue cracks
using an automatic mode tracking technique” Journal of Sound and Vibration,
Volume 266, Issue 4, Pages 805-814 (2003).
[378] Verboven P, Guillaume P, Cauberghe B, E. Parloo and S. Vanlanduit ”Frequency-
domain generalized total least-squares identification for modal analysis” Journal of
Sound and Vibration, Volume 278, Issues 1-2, Pages 21-38 (2004).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-366-320.jpg)
![References 339
[379] Verboven P, Parloo E, P. Guillaume and M. Van Overmeire ”Autonomous Structural
Health Monitoring-Part I: Modal Parameter Estimation and Tracking” Mechanical
Systems and Signal Processing, Volume 16, Issue 4, Pages 637-657 (2002).
[380] Verijenko Belinda and Verijenko Viktor ”Smart composite panels with embedded
peak strain sensors” Composite Structures, Volume 62, Issues 3-4, Pages 461-465
(2003).
[381] Vill, W. ”Theorie et Applications de la Notion de Signal Analytique,” Cables et
Transmission, Volume 2a, Pages 61-74 (1947). (Translated into English by I. Selin,
RAND Corp. Report T-92, Santa Monica, California, August, 1958.)
[382] Villery E, ”Change of magnetization by tension and by electric current” Ann. Phys.
Chem. Volume 126, Pages 87-122 (1865).
[383] Visone C, and Serpico C; ”Hysteresis operators for the modeling of magnetostric-
tive materials” Physica B: Condensed Matter; Volume 306, Issues 1-4, Pages 78-83
(2001).
[384] Wakiwaka H, Aoki K, H. Yamada, T. Yoshikawa, H. Kamata and M. Igarashi;
”Maximum output of a low frequency sound source using giant magnetostrictive
material” Journal of Alloys and Compounds; Volume 258, Pages 87-92 (1997).
[385] Wang Chun H and Fu-Kuo Chang ”Scattering of plate waves by a cylindrical inho-
mogeneity” Journal of Sound and Vibration, Volume 282, Issues 1-2, Pages 429-451
(2005).
[386] Chun H Wang, James T Rose and Fu-Kuo Chang ”A synthetic time-reversal imaging
method for structural health monitoring”, Smart Material Structure, Volume 13,
Pages 415-423 (2004).
[387] Kaihong Wang; Daniel J. Inman; Charles R. Farrar ”Crack-induced Changes in
Divergence and Flutter of Cantilevered Composite Panels” Structural Health Mon-
itoring, Volume 4, Number 4, 377-392 (2005)
[388] Wang Lei and Yuan F. G. ”Damage Identification in a Composite Plate using
Prestack Reverse-time Migration Technique” Structural Health Monitoring, Vol-
ume 4, Pages 195-211 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-367-320.jpg)
![340 References
[389] Wang, W. and A. Zhang, Sensitivity Analysis in Fault Vibration Diagnosis of
Structures, in Proc. of 5th International Modal Analysis Conference, Pages 496-
501 (1987).
[390] Wang, X.D. ; Huang G.L.”Evaluation of Cracks in Elastic Media using Surface
Signals” International Journal of Mechanics and Materials in Design; Volume 1,
Number 4, Pages 383-398
[391] Wang, X.D.; Huang G.L. ”Study of elastic wave propagation induced by piezoelec-
tric actuators for crack identification” International Journal of Fracture; Volume
126, Number 3, Pages 287-306
[392] Watkins, A.N.; Ingram, J.L.; Jordan, J.D.; Wincheski, R.A. ; Smits, J.M. and
Williams P.A.”Single Wall Carbon Nanotube-Based Structural Health Monitoring
Sensing Materials” (Chapter 4: Nano Devices and Systems) Technical Proceedings
of the 2004 NSTI Nanotechnology Conference and Trade Show, Nanotech, Volume
3 (2004).
[393] West, W.M., Illustration of the Use of Modal Assurance Criterion to Detect Struc-
tural Changes in an Orbiter Test Specimen, in Proc. Air Force Conference on Air-
craft Structural Integrity, Pages 1-6 (1984).
[394] Wetherhold Robert C. and Victor H. Guerrero; Effect of substrate anisotropy on
magnetic state and stress state in magnetostrictive multilayers; Journal of Mag-
netism and Magnetic Materials; Volume 262, Issue 2, Pages 218-229 (2003).
[395] Widrow, B. and Hoff, M. E. ”Adaptive switching circuits.” In IRE WESCON, pages
96-104 (1960).
[396] Williams, E.J., and Messina, A. ”Applications of the Multiple Damage Location
Assurance Criterion,” Proceedings of the International Conference on Damage As-
sessment of Structures (DAMAS 99), Dublin, Ireland, Pages 256-264 (1999).
[397] Williams, R.C. ”Theory of magnetostrictive delay lines for pulse and continuous
wave transmission.” IEEE Trans. Ultrason. Eng. UE-7, Page 1638 (1959).
[398] Williams, T.O. ”A generalized multilength scale nonlinear composite plate theory
with delamination”, International Journal of Solids and Structures, Volume 36,
Pages 3015-3050 (1999).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-368-320.jpg)
![References 341
[399] Worden K. ”Cost Action F3 On Structural Dynamics: Benchmarks For Working
Group 2-Structural Health Monitoring” Mechanical Systems and Signal Processing,
Volume 17, Issue 1, Pages 73-75 (2003).
[400] Worden K. and Dulieu Barton J. M.”An Overview of Intelligent Fault Detection
in Systems and Structures” Structural Health Monitoring, Volume 3, Pages 85-98
(2004).
[401] Worden, K.; Manson, G.; and Allman, D. ”Experimental Validation Of A Struc-
tural Health Monitoring Methodology: Part I. Novelty Detection On A Laboratory
Structure”, Journal of Sound and Vibration, Volume 259, Issue 2, Pages 323-343
(2003).
[402] Worden, K. ; Manson, G. and Allman, D. ”Experimental Validation Of A Structural
Health Monitoring Methodology: Part II. Novelty Detection On A Gnat Aircraft”
Journal Of Sound and Vibration, Volume 259, Issue 2, Pages 345-363 (2003).
[403] Worden, K., Manson, G., Wardle, R., Staszewski, W., and Allman, D. (1999) ”Ex-
perimental Validation of Two Structural Health Monitoring Methods,” Structural
Health Monitoring, Stanford University, Palo Alto, California, Pages 784-799 (2000).
[404] Wu, E.; Tsai, T.D.; and Yen,C.S. ”Two methods for determining impact-force his-
tory on elastic plates”, Experimental Mechanics, Volume 35, Pages 11-18 (1995).
[405] Wu Enboa, Jung-Cheng Yeh and Ching-Shih Yen Identification of Impact Forces
at Multiple Locations on Laminated Plates AIAA Journal , 0001-1452, Volume 32,
Number 12, Pages 2433-2439 (1994).
[406] Wu Enboa, Jung-Cheng Yeh and Ching-Shih Yen Impact on composite laminated
plates: An inverse method International Journal of Impact Engineering, Volume 15,
Issue 4, Pages 417-433 (1994).
[407] Wu S., Ghaboussi J., Garrett Jr. J.H., ”Use of neural networks in detection of
structural damage”, Computers & Structures, Volume 42, Number 4, Pages 649-
659 (1992).
[408] Xu Bin ”Time Domain Substructural Post-earthquake Damage Diagnosis Method-
ology with Neural Networks” Lecture Notes in Computer Science Springer-Verlag
GmbH Volume 3611/2005, Page: 520](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-369-320.jpg)
![342 References
[409] Xu L.Y. Influence of stacking sequence on the transverse matrix cracking in contin-
uous fiber crossply laminates. Journal of Composite Materials Volume 29 10, Pages
1337-1358 (1995).
[410] Xu Ying; Christopher K. Y. Leung; Zhenglin Yang; Pin Tong; Stephen K. L. Lee
” A New Fiber Optic Based Method for Delamination Detection in Composites.”
Structural Health Monitoring, Volume 2, Number 3, 205-223 (2003).
[411] Yan A.M., Kerschen G.,Boe P. De and Golinval J.C. ”Structural damage diagno-
sis under varying environmental conditions-Part I: A linear analysis” Mechanical
Systems and Signal Processing, Volume 19, Issue 4, Pages 847-864 (2005).
[412] Yan A.M. , Kerschen G., Boe P. De and Golinval J.C. ”Structural damage diagnosis
under varying environmental conditions-part II: local PCA for non-linear cases” Me-
chanical Systems and Signal Processing, Volume 19, Issue 4, Pages 865-880 (2005).
[413] Yang Ching Yu Solution of an inverse vibration problem using a linear least-squares
error method Applied Mathematical Modeling Volume 20, Issue 10 , Pages 785-788
(1996).
[414] Yang S. and Yuan F.G. ”Transient wave propagation of isotropic plates using a
higher-order plate theory” International Journal of Solids and Structures, Volume
42, Issue 14, Pages 4115-4153 (2005).
[415] Yan Y.J. and Yam L.H., ”Online detection of crack damage in composite plates
using embedded piezoelectric actuators/sensors and wavelet analysis”, Composite
Structure, Volume 58, Pages 29-38 (2002).
[416] Ye Lin, Ye Lu, Zhongqing Su and Guang Meng ”Functionalized composite struc-
tures for new generation airframes: a review” Composites Science and Technology,
Volume 65, Issue 9, Pages 1436-1446 (2005).
[417] Yua Yunhe, Zenngchu Xiaob, Nagi G. Naganathana and Rao V. Dukkipati Dynamic
Preisach modelling of hysteresis for the piezoceramic actuator systemMechanism
and Machine Theory Volume37, Issue 1, Pages 75-89 (2002).
[418] Yuan Shenfang , Lei Wang and Ge Peng ”Neural network method based on a new
damage signature for structural health monitoring” Thin-Walled Structures, Volume
43, Issue 4, Pages 553-563 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-370-320.jpg)
![References 343
[419] Yun C.B., Yi J.H. , Bahng E.Y., ”Joint damage assessment of framed structures
using a neural networks technique”, Engineering Structures, Volume 23, Pages 425-
435 (2001).
[420] Zak, A., Krawczuk, M., and Ostachowicz, W. Vibration of a Laminated Compos-
ite Plate with Closing Delamination”, Structural Damage Assessment Using Ad-
vanced Signal Processing Procedures, Proceedings of DAMAS 99, University Col-
lege, Dublin, Ireland, Pages 17-26 (1999).
[421] Zang C., Friswell M. I., and Imregun M. ”Structural Damage Detection using In-
dependent Component Analysis” Structural Health Monitoring, Volume 3, Pages
69-83 (2004).
[422] Zhang C. and Zhu T., On inter-relationships of elastic moduli and strains in cross-
ply laminated composites. Composites Sciences and Technology Volume 56 2, Pages
135-146 (1996).
[423] Zhang J., Fan J. and Soutis C., Analysis of multiple matrix cracking in [0/90]s
composites laminates Part 1: in-plane stiffness properties.Composites Volume 23 5,
Pages 291-298 (1992).
[424] Zhang J., Fan J. and Soutis C., Analysis of multiple matrix cracking in [0m/90n]s
composite laminates Part 2: development of transverse ply cracks.Composites Vol-
ume 23 5, Pages 299-304 (1992).
[425] Zhang, L., Quiong, W., and Link, M. ”A Structural Damage Identification Ap-
proach Based on Element Modal Strain Energy,” Proceedings of ISMA23, Noise
and Vibration Engineering, Leuven, Belgium (1998).
[426] Zheng Huiming, Ming Lib and Zeng He Active and passive magnetic constrained
damping treatment International Journal of Solids and Structures Volume 40, Issue
24 , Pages 6767-6779 (2003).
[427] Zienkiewicz O.C., Taylor R.L. and Too J.M., ”Reduced integration technique in
general analysis of plates and shells”, International Journal for Numerical Methods
in Engineering, Volume 3, Pages 275-290 (1971).
[428] Zingoni Alphose ”Structural health monitoring, damage detection and long-term
performance” Engineering Structures, Volume 27, Issue 12, Pages 1713-1714 (2005).](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-371-320.jpg)
![344 References
[429] Zonta, D., Modena, C., and Bursi, O.S. ”Analysis of Dispersive Phenomena in
Damaged Structures,” European COST F3 Conference on System Identification
and Structural Health Monitoring, Madrid, Spain, Pages 801-810 (2000).
[430] Zou, Y., Tong, L. and Steven, G.P. ”Vibration-based model-dependent damage
(delamination) identification and health monitoring for composite structures - a
review”, Journal of Sound and Vibration, Volume 230, Number 2, Pages 357-378
2000.](https://image.slidesharecdn.com/dworkcpamitavamyphddebiprasadghoshphdthesiss-100208000816-phpapp01/85/Debiprasad-Ghosh-Ph-D-Thesis-372-320.jpg)















































