V
V1=20,35 V
V2=7,4 V
V3=37V
V4=8,88 V
V5=8,88 V
Veq'=8,88 V
VT=75 V
R
R1
R2
R3
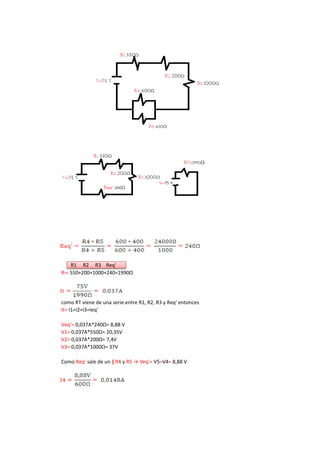
RT= 550+200+1000+240=1990Ω
como RT viene de una serie entre R1, R2, R3 y Req' entonces
It= I1=I2=I3=Ieq'
Veq'= 0,037A*240Ω= 8,88 V
V1= 0,037A*550Ω= 20,35V
V2= 0,037A*200Ω= 7,4V
V3= 0,037A*1000Ω= 37V
Como Req' sale de un ǁ R4 y R5 → Veq'= V5=V4= 8,88 V
R1 R2 R3 Req'
2.
P1=20,35V*0,037A= 0,75295 W
P2=7,4V*0,037A=0,2738 W
P3=37V*0,037A= 1,369 W
P4=8,88V*0,0148A= 0,131424 W
P5=8,88V*0,0222A= 0,197136 W
Peq'=8,88V*0,037A= 0,32856 W
Pt=75V*0,037A= 2,775 W
3.
V I RP
V1=20,35 V I1=0,037 A R1=550Ω P1=0,75295 W
V2=7,4 V I2=0,037 A R2=200Ω P2=0,2738 W
V3=37 V I3=0,037 A R3=1000Ω P3=1,369 W
V4=8,88 V I4=0,0148 A R4=600Ω P4=0,131424 W
V5=8,88 V I5=0,0222 A R5=400Ω P5=0,197136 W
Veq'=8,88 V Ieq'=0,037 A Req'=240Ω Peq'=0,32856 W
VT=75 V IT=0,037 A RT=1990Ω PT=2,775 W
R
Resistenci
a en Ω
V Voltaje en V I
Corriente
en A
P
Potencia en
W
R1 550 V1 20,74 I1 0,0377 P1 0,782
R2 200 V2 7,54 I2 0,0377 P2 0,284
R3 1000 V3 37,70 I3 0,0377 P3 1,421
R4 600 V4 9,05 I4 0,01508 P4 0,136
R5 400 V5 9,05 I5 0,02262 P5 0,205
Req' 240 Veq' 9,05 Ieq' 0,0377 Peq' 0,341
Rt 1990 Vt 75,00 It 0,0377 Pt 2,827