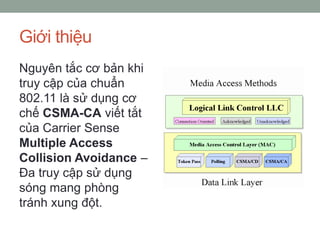
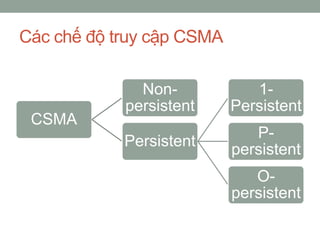
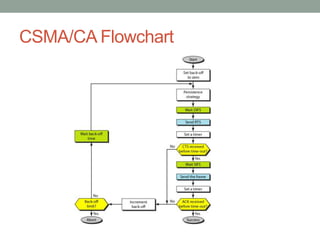
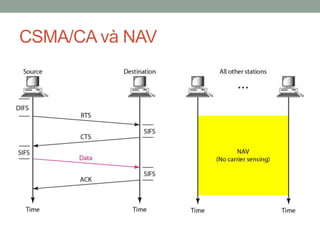
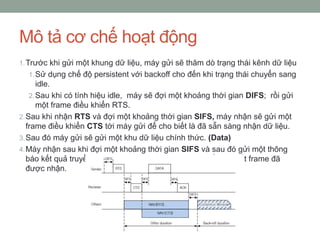
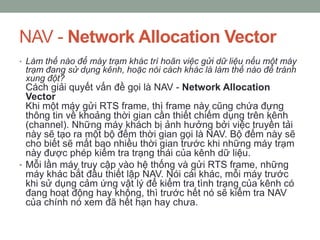
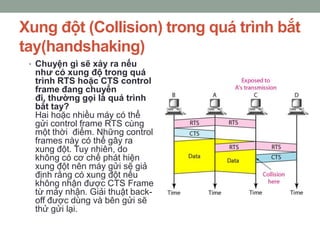
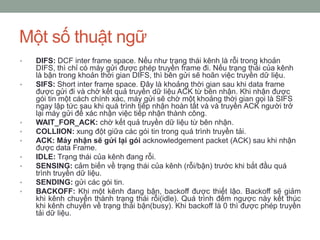

Tài liệu giới thiệu nguyên tắc CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance) trong chuẩn 802.11, cơ chế này giúp các thiết bị truy cập kênh truyền dữ liệu mà không xảy ra xung đột. Nó mô tả quy trình lắng nghe kênh để xác định trạng thái trước khi gửi dữ liệu, quy tắc backoff và việc sử dụng RTS/CTS để xác nhận quá trình truyền tải. Tài liệu cũng giải thích về NAV (Network Allocation Vector) và các thuật ngữ liên quan như DIFS, SIFS và ACK.






















































