Rencana Pembelajaran Semester (RPS) Matakuliah Pemrograman Dasar adalah pedoman yang akan digunakan oleh dosen untuk mengajar matakuliah pemrograman dasar selama 1 semester
Rencana Pembelajaran Semester (RPS) Matakuliah Pemrograman Dasar adalah pedoman yang akan digunakan oleh dosen untuk mengajar matakuliah pemrograman dasar selama 1 semester
Sampai saat ini, perkuliahan di bidang teknik pada umumnya bersifat abstrak, verbal, deduktif dan sekuensial, sehingga mahasiswa cenderung menjadi pasif dan sulit memahami. Hal ini menjadi tantangan tersendiri dalam proses belajar mengajar di bidang teknik, terlebih ketika membahas teori Sinyal dan Sistem. Untuk memudahkan dosen dan mahasiswa, penulis menyediakan bagian pengenalan ini agar dosen dan mahasiswa dapat mengambil manfaat secara maksimal dari buku ini.
Pada dasarnya, dengan menerapkan prinsip memulai dengan akhir, pengenalan ini dimulai dengan menyampaikan capaian pembelajaran (CP). Buku ini membantu mahasiswa mencapai 7 CP Pengetahuan dan 7 CP Keterampilan. CP Pengetahuan diwujudkan melalui organisasi materi ke dalam 7 Bab pokok bahasan. Ketujuh Bab ini dapat dipelajari atau diajarkan dengan urutan berbeda bergantung prasyarat yang dipenuhi oleh mahasiswa, oleh karena itu di sini dikenalkan 3 macam urutan atau lintasan belajar. Untuk mengubah Pengetahuan menjadi Keterampilan, buku ini menerapkan pendekatan pedagogik melalui pendefinsian istilah, prosedur, pemberian contoh, simulasi, dan latihan. Secara eksplisit, tiap CP Keterampilan dipetakan dengan prosedur-prosedur yang disediakan untuk memastikan mahasiswa dapat mengukur capaian Keterampilannya. Untuk mendukung dosen dan mahasiswa dalam proses belajar mengajar teori Sinyal dan Sistem ini, di luar buku ini, tim penulis menyediakan sumber belajar lainnya yang disampaikan pada akhir pengenalan ini.
TUGAS UJIAN AKHIR SEMESTER
RISET OPERASI DAN TEKNIK PENGAMBILAN
KEPUTUSAN
Rangkuman Buku:
“Operation Research (Model-model Pengambilan Keputusan)”
Penulis: Tjutju Tarliah Dimyati, Ahmad Dimyati
KEVIN SURYA (1534021022)
SEMESTER V
Materi kuliah Penelitian Operasional 1 untuk mahasiswa S1 Teknik Industri
Bab 1 Pendahuluan berisi motivasi, konsep, definisi, dan sejarah penelitian operasional
Sampai saat ini, perkuliahan di bidang teknik pada umumnya bersifat abstrak, verbal, deduktif dan sekuensial, sehingga mahasiswa cenderung menjadi pasif dan sulit memahami. Hal ini menjadi tantangan tersendiri dalam proses belajar mengajar di bidang teknik, terlebih ketika membahas teori Sinyal dan Sistem. Untuk memudahkan dosen dan mahasiswa, penulis menyediakan bagian pengenalan ini agar dosen dan mahasiswa dapat mengambil manfaat secara maksimal dari buku ini.
Pada dasarnya, dengan menerapkan prinsip memulai dengan akhir, pengenalan ini dimulai dengan menyampaikan capaian pembelajaran (CP). Buku ini membantu mahasiswa mencapai 7 CP Pengetahuan dan 7 CP Keterampilan. CP Pengetahuan diwujudkan melalui organisasi materi ke dalam 7 Bab pokok bahasan. Ketujuh Bab ini dapat dipelajari atau diajarkan dengan urutan berbeda bergantung prasyarat yang dipenuhi oleh mahasiswa, oleh karena itu di sini dikenalkan 3 macam urutan atau lintasan belajar. Untuk mengubah Pengetahuan menjadi Keterampilan, buku ini menerapkan pendekatan pedagogik melalui pendefinsian istilah, prosedur, pemberian contoh, simulasi, dan latihan. Secara eksplisit, tiap CP Keterampilan dipetakan dengan prosedur-prosedur yang disediakan untuk memastikan mahasiswa dapat mengukur capaian Keterampilannya. Untuk mendukung dosen dan mahasiswa dalam proses belajar mengajar teori Sinyal dan Sistem ini, di luar buku ini, tim penulis menyediakan sumber belajar lainnya yang disampaikan pada akhir pengenalan ini.
TUGAS UJIAN AKHIR SEMESTER
RISET OPERASI DAN TEKNIK PENGAMBILAN
KEPUTUSAN
Rangkuman Buku:
“Operation Research (Model-model Pengambilan Keputusan)”
Penulis: Tjutju Tarliah Dimyati, Ahmad Dimyati
KEVIN SURYA (1534021022)
SEMESTER V
Materi kuliah Penelitian Operasional 1 untuk mahasiswa S1 Teknik Industri
Bab 1 Pendahuluan berisi motivasi, konsep, definisi, dan sejarah penelitian operasional
1. 1
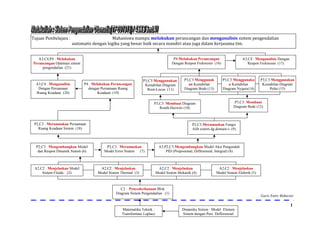
Tujuan Pembelajara : Mahasiswa mampu melakukan perancangan dan menganalisis sistem pengendalian
automatis dengan logika yang benar baik secara mandiri atau juga dalam kerjasama tim.
P4:Melakukan Perancangan
Dengan Respon Frekwensi (16)
P3,C3:Menggunakan
Kestabilan Diagram
Polar (15)
P3,C3: Membuat
Diagram Bode (12)
Garis Entry Behavior
P4 : Melakukan Perancangan
dengan Persamaan Ruang
Keadaan (19)
A3,C4 : Menganalisis
Dengan Persamaan
Ruang Keadaan (20)
A3,C4 : Menganalisis Dengan
Respon Frekwensi (17)
P3,C3:Menggunak
an Kestabilan
Diagram Bode (13)
P3,C3:Menggunaka
n Kestabilan
Diagram Nyquis(14)
P3,C3:Menggunakan
Kestabilan Diagram
Root-Locus (11)
P3,C3: Membuat Diagram
Routh-Hurwitz (10)
P2,C3:Merumuskan Fungsi
Alih sistem dg.domain-s (9)
A3,P2,C3:Mengembangkan Model Aksi Pengendali
PID (Proposional, Differensial, Integral) (8)
P2,C3 : Mengembangkan Model
dan Respon Dinamik Sistem (6)
P2,C3 : Merumuskan
Model Error Sistem (7)
P2,C3 : Merumuskan Persamaan
Ruang Keadaan Sistem (18)
A2,C2 : Menjelaskan Model
Sistem Fluida (2)
A2,C2 : Menjelaskan
Model Sistem Thermal (3)
A2,C2 : Menjelaskan
Model Sistem Mekanik (4)
A2,C2 : Menjelaskan
Model Sistem Elektrik (5)
C2 : Penyederhanaan Blok
Diagram Sistem Pengendalian (1)
Matematika Teknik :
Transformasi Laplace
Dinamika Sistem : Model Elemen
Sistem dengan Pers. Defferensial
A3,C4,P4 : Melakukan
Perancangan Optimasi sistem
pengendalian (21)
2. RENCANA PEMBELAJARAN SEMESTER
JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI - ITS
MATA KULIAH KODE Rumpun MK BOBOT (sks) SEMESTER Direvisi
SISTEM PENGENDALIAN OTOMATIS TF091318 Instrumentasi T=3 P=1 VI 13 Agustus 2013
OTORISASI Pengembang RP Koordinator RMK Ka PRODI
Capaian Pembelajaran (CP) Program Studi
KK1: mampu menerapkan pemikiran logis, kritis, sistematis, dan inovatif dalam konteks pengembangan atau implementasi ilmu
pengetahuan dan/atau teknologi sesuai dengan bidang keahliannya;
PP1 : Menguasai keilmuan Teknik Fisika yang meliputi bidang: instrumentasi, akustik & fisika bangunan, energi & pengkondisian
lingkungan, bahan, dan fotonika, untuk pengembangan ilmu pengetahuan dan teknologi;
PP4 : Mampu berpikir kreatif dan inovatif;
KK7 :Mampu bekerjasama dalam tim multidisiplin;
S9 : menunjukkan sikap bertanggung jawab atas pekerjaan di bidang keahliannya secara mandiri;
Mata Kuliah
Mahasiswa mampu menjelaskan konsep & prosedur pada beragam teknik dan teknologi konversi dan konservasi energi, baik
yang bersumber dari energi fossil maupun non-fossil (renewable energy) berdasarkan konsep ’Energy systems in sustainable
future’, baik dengan kinerja individu meupun secara berkelompok dalam kerjasama tim.
Diskripsi Singkat Mata
Kuliah (MK)
Bahan Kajian
Teknologi Konversi Energi Konvensional & Energi Terbarukan
Pokok Bahasan
Dalam Matakuliah ini mahasiswa akan mempelajari pokok bahasan-pokok bahasan sebagai berikut +
TEKNIK KONVERSI ENERGI:Sumber-sumber Energi, Konversi Energi Panas – Kimia – Magnet - Mekanik – Listrik, Energi Fossil ;
Minyak bumi – Gas dan Batu bara.
ENERGI TERBARUKAN:Energi Angin,Energi Air, Energi Matahari,Energi Panas Bumi,
ENERGI ALTERNATIF:Hydroelectricity,Hidrogen Energi, Biomas Energy.
KONSERVASI ENERGI:Energi dan Lingkungan,Konservasi kawasan Energi,Budidaya Energi,Dampak Kebijakan Energi.
2
3. Pustaka Utama :
1. Syamsul Arifin,” Bahan Ajar TK&KE : e-Learning:SHARE-ITS http:share.its.ac.id”,2013, TF-ITS.
2. Archie W. Culp,Jr.,Ph.D,” Principles of Energy Conversion” , McGraw-Hill,Ltd.,1979.
3. James A. Fay & Dan S. Golomb,”Energy and the Environment”, Oxford, 2002.
Pendukung :
4. M.M. El-Wakil, “Power Plant Technology”, McGraw-Hill,Ltd.,
5. Duffie & Beckmann,”Solar Engineering of Thermal Processes”, 2ndEdition, Wiley Interscience, 1991.
Media Pembelajaran Software : Hardware :
OS:Windows; Office
Fluen
PC & LCD Projector
Model system pengkonversi sederhana (Lab),
Team Teaching Syamsul Arifin, Aulia Siti Aisjah, Bambang Lelono
Matakuliah Syarat Termodinamika
Mg Ke- CP-Mata Kuliah
(Sesuai tahapan belajar)
Materi Pembelajaran
[Pustaka]
Metode / Strategi
Pembelajaran
[ Estimasi Waktu]
Assessment
Indikator Bentuk Bobot
SUMBER-SUMBER ENERGI & TEKNIK KONVERSI ENERGI FOSSIL BESERTA DAMPAK LINGKUNGANNYA
(9) Evaluasi Tengah Semester (Evaluasi Formatif-Evaluasi yg dimaksudkan untuk melakukan improvement proses pembelajaran
berdasarkan assessment yang telah dilakukan)
RENEWABLE ENERGY CONVERSION
(18) Evaluasi Akhir Semester (Evaluasi yg dimaksudkan untuk mengetahui capaian akhir hasil belajar mahasiswa)
3
4. Catatan :
1 sks = (50’ TM + 60’ BT + 60’ BM)/Minggu BM = Belajar Mandiri T = Teori (aspek ilmu pengetahuan)
TM = Tatap Muka (Kuliah) PS = Praktikum Simulasi (3 jam/minggu) P = Praktek (aspek ketrampilan kerja)
BT = Belajar Terstruktur. PL = Praktikum Laboratorium (3 jam/minggu)
Syamsul Arifin, Teknik Fisika FTI-ITS
RENCANA PEMBELAJARAN
SISTEM PENGENDALIAN OTOMATIS
MATA KULIAH
KODE / BOBOT / Smt
Sistem Pengendalian Otomatis
TF091318/ 4 sks / 6
Direvisi tgl : 18 Februari 2011
Semester Genap 2010/2011
Tujuan Pembelajaran MK
(Learning Objective)
Mahasiswa mampu melakukan perancangan dan menganalisis sistem pengendalian automatis dengan
logika yang benar baik secara mandiri atau juga dalam kerjasama tim.
Student Learning
Outcomes (Competencies)
1. Mahasiswa mampu menjelaskan (C2)dengan benar model sistem pengendalian beserta bagian-bagiannya
(KU1,KU3),
2. Mahasiswa mampu merumuskan (C3) dengan teliti Respon dinamik, Pengendalian PID dan Error sistem
pengendalian otomatik (KU1,KU3),
3. Mahasiswa mampu menganalisis (C4) & melakukan perancangan (P4) sistem pengendalian otomatik
menggunakan domain-s, secara kreatif dalam kerjasama tim (KU1,KU2,KU3,KP2,KP3,KL1),
4. Mahasiswa mampu menganalisis (C4) & melakukan perancangan (P4) sistem pengendalian otomatik menggunakan
persaman ruang keadaan (state space),sampai pada optimasi sistem, secara kreatif dalam kerjasama tim, serta
menggunakan media TIK (KU1,KU2,KU3,KP2,KP3,KP4,KL1).
Materi Pembelajaran
(Course Matter)
Pengertian dasar sistem kontrol automatik; Pengertian dasar, Komponen sistem pengendalian, Review matematika.Review
permodelan system. Respon dinamik system; Respon bebas,Respon keadaan tunak, Respon transisi, Respon transien, Respon step
sistem orde satu, orde dua dan tinggi, Respon Ramp, para-bolik. Error system dinamik; Koefisien kesalahan error, Deret
error,Kriterian error. Perancangan sistem kontrol automatik industri ; Perancangan dg. : Aksi Kontrol PD, Aksi Kontrol PI,
Aksi Kontrol PID, Kontroller Phase-Lead, Kontroller Phase-lag. Kestabilan sistem dgn kreteria Routh-Hurwitz dan metoda
Root-Locus ; Kreteria kestabilan Routh-Hurwitz, Diagram Root-Locus,Perancangan sistem kontrol dg. Root-locus. Metoda
respons frekuensi ; Perancangan dan analisis respon frekwensi, Diagram Bode, Diagram polar, Kestabilan Nyquis. Analisis dan
4
5. Perancangan system Kontrol deg. Pers. ruang keadaan ; Pemodelan dalam persamaan ruang keadaan, Peyelesaian persamaan
ruang keadaan, Matrik transisi, Analisis keterkontrolan, Analisis keteramatan. Teknik optimasi sistem kontrol ; Perancangan
dengan penempatan pole, Perancangan dengan Controller-Observer, Perancangan regulator Optimal.
Pustaka Pustaka Utama :
1. Syamsul Arifin, Aulia Siti Aisjah, “Teknik Pengendalian Modern”,Edisi-1,PT.GRASINDO,JKT.,2009.
2. Kuo,B.C.,”Automatic Control Sistem”, 6th ed., Printice-Hall, Englewood Cliffs,NJ., 1998.
3. Ogata,K.,”Modern Control Engineering”, 4nd ed.,Printice-Hall, Englewood Cliffs,NJ., 1997.
Pustaka Penunjang :
1. Bahram Shahian, Michael Hassul,”Control Systems Using MATLAB”, International Editions, Printice-Hall, 1997.
2. The MathWorks, Inc.,”Control System Toolbox”, Printice-Hall, 1997.
3. Syamsul Arifin, ”Kontrol Automatik II”, Jurusan Teknik Fisika-FTI-ITS, 1997.
Media belajar Software :
OS:Windows
MATLAB
Hardware :
PC & LCD Projector
Model system pengendalian otomatis
Team Teaching Syamsul Arifin, Bambang L., Totok S., Aulia SA.
Assessment Homework (Case-Study)
Paper & Presentation, Ujian Lisan, Tugas Perancangan
Ujian Off-Line & On-Line
Matakuliah Syarat Pemodelan Sistem Dinamik (TF091317/4sks)
Minggu
Sub-Learning Outcomes
Materi Pembelajaran
Ke
(Sub-Competencies)
[Pustaka]
Indikator Pencapaian Aktivitas Pembelajaran
Mhs.
[ Estimasi waktu ]
Asesmen
Bentuk/Unsur Bobot
1,2 Mahasiswa mampu
menjelaskan pengertian
tentang dasar-dasar
sistem pengendalian dan
beragam model system
pengendalian. (1-5)
Pengertian dasar sistem
kontrol automatik;
· Pengertian dasar,
· Komponen sistem
pengendalian,
· Review Pemodelan
sistem;fluida, thermal,
mekanik dan elektrik.
[1]:hal 1-89
[2]:hal 21-57
[3]:hal 1-176
· Ketepatan
menjelaskan elemen-elemen
dalam system
pengendalian.
· Ketepatan
menjelaskan model
system
penegendalian;fluida
,thermal, mekanik
dan elektrik. .
· Kuliah & Brainstorming,
Diskusi kelompok,
[TM: 2x(4x50”)]
· (Tugas-1: Menyusun
Root Map Sistem
Pengendalian Otomatis)
[BT+BM:(1+1)x(4x50”)]
· (Tugas-2: Membuat
Poster Blok Diagram
Sistem Pengendalian
Otomatis)
[BT+BM:(1+1)x(4x50”)]
Non-Tes :
· Root Map SPO.
· Poster tentang
SPO (kreatifitas
& kompleksitas)
5 %
3 Mahasiswa mampu
mengembangkan model
respons dinamik sistem
Respon system dinamik;
· Respon bebas
· Respon keadaan tunak
Ketepatan
mengembangkan
model respon system
· Kuliah,
Diskusi kelompok,
[TM: 1x(4x50”)]
Non-Tes :
· Program
MATLAB Model
10 %
5
6. orde satu, orde dua, dan
orde tinggi terhadap
masukkan step, ramp
dan parabolic. (6)
· Respon transisi
· Respon transien
· Respon step sistem
orde satu, orde dua
dan tinggi
· Respon Ramp,
parabolic.
[1]:hal 90-120
[2]:hal 361-411
[3]:hal 249-343
orde satu, orde dua
dan tinggi.
· (PS-1: Mengembangkan
model respon dinamika
SPO dg MATLAB)
[PS+BM:(1+)x(4x50”)]
Respon SPO.
· Membuat
diskripsi Model
Respon SPO.
4 Mahasiswa mampu
merumuskan model
error system
pengendalian otomatis.
(7)
Error system dinamik :
· Koefisien kesalahan
error,
· Deret error,
· Kriterian error,
[1]:hal 120-126
[2]:hal 361-384
[3]:hal 289-294
Ketepatan
merumuskan error
SPO.
· Kuliah,
Diskusi kelompok,
[TM: 1x(4x50”)]
· (PS-2: Memodelkan
rumusan error SPO dg
MATLAB)
[PS+BM:(1+1)x(4x50”)]
Non-Tes :
· Program
MATLAB Model
rumusan error
SPO.
· Membuat
diskripsi Model
rumusan error
SPO.
5,6,7 Mahasiswa mampu
mengembangkan model
system pengendalian
PID. (8)
Perancangan sistem
pengendalian PID;
· Aksi Pengendalian PD,
· Aksi Pengendalian PI,
· Aksi Pengendalian PID,
· Pengendalian Phase-
Lead,
· Pengendalian Phase-lag.
[1]:hal 145-153
[2]:hal 664-713
[3]:hal 182-224,
592-604
· Ketepatan
menjelaskan
perbedaan aksi
pengendalian
PD,PI,PID,
· Ketepatan memilih
aksi pengendalian
terhadap jenis plant
SPO,
· Trampil
mengembangkan
model SPO-PID
menggunakan
MATLAB.
·Kuliah,
Diskusi kelompok,
[TM: 2x(4x50”)]
·(PS-3: Mengembangkan
model SPO-PID dg
MATLAB)
[PS+BM:(2+2)x(4x50”)]
·(PL-1: Praktikum SPO-PID
dg PCT/ MiniPlant )
[PL+BM:(1+1)x(4x50”)]
Non-Tes :
· Program
MATLAB Model
SPO-PID.
· Membuat
diskripsi Model
SPO-PID.
· Laporan
Praktikum SPO-PID
Tes :
Lisan
20 %
8 Mahasiswa mampu
menggunakan kreteria
kestabilan Routh-
Hurwitz dan metoda
Kestabilan sistem
pengendalian;
· Kreteria kestabilan,
· Routh-Hurwitz,
· Ketepatan dalam
menggunakan
metoda sesuai
dengan
· Kuliah,
Diskusi kelompok,
[TM: 1x(4x50”)]
· (Tugas-3:Analisa
Non-Tes :
Membuat Analisa
kestabilan dg
Routh-Hurwitz
5%
6
7. Root-Locus pada system
pengendalian otomatis.
(9,10,11)
· Diagram Root-Locus,
· Perancangan sistem,
pengendalian dg. Root-locus.
[1]:hal 131-159
[2]:hal 477-504
[3]:hal 385-387
procedure/langkah-langkah.
· Kejelasan dalam
menerangkan
procedure/langkah-langkah
tsb. diatas.
kestabilan dg Routh-
Hurwitz dan Root-Locus
secara manual)
[BT+BM:2x(4x50”)]
dan Root-Locus
secara manual
dan membuat
diskripsinya.
9,10 Mahasiswa mampu
menganalisis dan
melakukan perancangan
sistem dgn metoda
respons frekuensi.
(12,13,14,15,16,17)
Metoda respons
frekuensi;
· Perancangan dan
analisis respon
frekwensi,
· Diagram Bode,
· Diagram polar,
· Kestabilan Nyquis.
[1]:hal 160-186
[2]:hal 557-775
[3]:hal 426-641
· Ketepatan rancangan
SPO,
· Ketajaman analisis,
· Ketrampilan
menggunakan
MATLAB untuk
rancangan & analisis
SPO.
· Kuliah,
Diskusi kelompok,
[TM: 2x(4x50”)]
· (PS-4: Merancang SPO
dg MATLAB berbasis
metoda respons
frekuensi)
[PS+BM:(2+2)x(4x50”)]
Non-Tes :
· Program
MATLAB
Perancangan
SPO berbasis
metoda respons
frekuensi,
· Presentasi
Kelompok.
15 %
11,
12,13
Mahasiswa mampu
melakukan perancangan
dan analisis sistem
Pengendalian
menggunakan
persamaan ruang
keadaan. (18,19,20)
Perancangan dan analisis
system Pengendalian
dengan Persamaan ruang
keadaan;
· Pemodelan dalam
persamaan ruang
keadaan,
· Peyelesaian persamaan
ruang keadaan,
· Matrik transisi,
· Analisis keterkontrolan,
· Analisis keteramatan.
· Analisa kestabilan
Lyapunov.
[1]:hal 187-276
[2]:hal 273-285
[3]:hal 677-820
· Ketepatan rancangan
SPO,
· Ketajaman analisis,
· Ketrampilan
menggunakan
MATLAB untuk
rancangan & analisis
SPO.
· Kerjasama dalam
tim,
· Kemampuan
Presentasi & diskusi
· Kuliah,
Diskusi kelompok,
[TM: 3x(4x50”)]
· (PS-5: Merancang SPO
dg SIMULINK-MATLAB
menggunakan
persamaan ruang
keadaan)
[PS+BM:(3+3)x(4x50”)]
Non-Tes :
· Program
SIMULINK-MATLAB
Perancangan
SPO
menggunakan
persamaan
ruang keadaan,
20 %
14 Presentasi & Diskusi
kelompok
Non-Tes :
· Makalah & slide
7
8. [TM+BT:2x(4x50”)]
[BM:1x(4x50”)]
presentasi
· Presentasi
Kelompok.
15,16 Mahasiswa mampu
melakukan perancangan
optimasi pada sistem
pengendalian
berdasarkan persamaan
ruang keadaan. (21)
Teknik optimasi sistem
pengendalian;
· Perancangan dengan
penempatan pole
· Perancangan dengan
Controller-Observer
· Perancangan regulator
Optimal
[1]:hal 236-258
[2]:hal 273-285
[3]:hal 677-820
· Ketepatan rancangan
optimasi SPO,
· Ketrampilan
menggunakan
MATLAB untuk
rancangan optimasi
SPO.
· Kuliah,
Diskusi kelompok,
[TM: 2x(4x50”)]
· (PS-6: Merancang
optimasi SPO dg
MATLAB menggunakan
persamaan ruang
keadaan)
[PS+BM:(2+2)x(4x50”)]
Non-Tes :
· Program
MATLAB
Perancangan
SPO
menggunakan
persamaan
ruang keadaan,
· Presentasi
Kelompok.
10 %
17 Ujian Tulis Off Line(ujian tulis)
On Line(SHARE-ITS)
Tes 10 %
5 %
Catatan :
1 sks = (50’ TM + 50’ BT + 50’ BM)/Minggu
TM = Tatap Muka (Kuliah)
BT = Belajar Terstruktur.
BM = Belajar Mandiri
PS = Praktikum Simulasi (100’/minggu)
PL = Praktikum Laboratorium (100’/minggu)
8
9. SILABUS
Mata Kuliah : Sistem Pengendalian Otomatis
Kode/bobot/Semester : TF091318 / 4 sks / 6
Tujuan Pembelajaran (Learning Objective):
Mahasiswa mampu melakukan perancangan dan menganalisis sistem pengendalian automatis dengan logika yang benar baik
secara mandiri atau juga dalam kerjasama tim.
Kompetensi :
1. Mahasiswa mampu menjelaskan (C2)dengan benar model sistem pengendalian beserta bagian-bagiannya (KU1,KU3),
2. Mahasiswa mampu merumuskan (C3) dengan teliti Respon dinamik, Pengendalian PID dan Error sistem pengendalian otomatik
(KU1,KU3),
3. Mahasiswa mampu menganalisis (C4) & melakukan perancangan (P4) sistem pengendalian otomatik menggunakan domain-s,
secara kreatif dalam kerjasama tim (KU1,KU2,KU3,KP2,KP3),
4. Mahasiswa mampu menganalisis (C4) & melakukan perancangan (P4) sistem pengendalian otomatik menggunakan persaman
ruang keadaan (state space),sampai pada optimasi sistem, secara kreatif dalam kerjasama tim, serta menggunakan media TIK
(KU1,KU2,KU3,KP2,KP3,KP4).
Pokok Bahasan (Subject Matter):
Pengertian dasar sistem kontrol automatik; Pengertian dasar, Komponen sistem pengendalian, Review matematika.Review permodelan
system. Respon dinamik system; Respon bebas,Respon keadaan tunak, Respon transisi, Respon transien, Respon step sistem orde satu,
orde dua dan tinggi, Respon Ramp, para-bolik. Error system dinamik; Koefisien kesalahan error, Deret error,Kriterian error.
Perancangan sistem kontrol automatik industri ; Perancangan dg. : Aksi Kontrol PD, Aksi Kontrol PI, Aksi Kontrol PID, Kontroller
Phase-Lead, Kontroller Phase-lag. Kestabilan sistem dgn kreteria Routh-Hurwitz dan metoda Root-Locus ; Kreteria kestabilan Routh-
9
10. Hurwitz, Diagram Root-Locus,Perancangan sistem kontrol dg. Root-locus. Metoda respons frekuensi ; Perancangan dan analisis respon
frekwensi, Diagram Bode, Diagram polar, Kestabilan Nyquis. Analisis dan Perancangan system Kontrol deg. Pers. ruang keadaan ;
Pemodelan dalam persamaan ruang keadaan, Peyelesaian persamaan ruang keadaan, Matrik transisi, Analisis keterkontrolan, Analisis
keteramatan. Teknik optimasi sistem kontrol ; Perancangan dengan penempatan pole, Perancangan dengan Controller-Observer,
Perancangan regulator Optimal.
Pustaka Utama :
1. Aulia Siti Aisjah,Syamsul Arifin, “Teknik Pengendalian Modern”,Edisi-1,PT.GRASINDO,JKT.,2009.
2. Kuo,B.C.,”Automatic Control Sistem”, 6th ed., Printice-Hall, Englewood Cliffs,NJ., 1998.
3. Ogata,K.,”Modern Control Engineering”, 4nd ed.,Printice-Hall, Englewood Cliffs,NJ., 1997.
Pustaka penunjang :
4. Bahram Shahian, Michael Hassul,”Control Systems Using MATLAB”, International Editions, Printice-Hall, 1997.
5. The MathWorks, Inc.,”Control System Toolbox”, Printice-Hall, 1997.
6. Syamsul Arifin, ”Kontrol Automatik II”, Jurusan Teknik Fisika-FTI-ITS, 1997.
Prasyarat : Pemodelan Sistem Dinamik (TF091317/4sks)
10
11. RENCANA EVALUASI PEMBELAJARAN MAHASISWA
Matakuliah : Sistem Pengendalian Otomatis,
Kode : TF091318, sks:4 sks, smt:6
Kompetensi :
1. Mahasiswa mampu menjelaskan (C2)dengan benar model sistem pengendalian beserta bagian-bagiannya (KU1,KU3),
2. Mahasiswa mampu merumuskan (C3) dengan teliti Respon dinamik, Pengendalian PID dan Error sistem pengendalian otomatik (KU1,KU3),
3. Mahasiswa mampu menganalisis (C4) & melakukan perancangan (P4) sistem pengendalian otomatik menggunakan domain-s, secara kreatif dalam
kerjasama tim (KU1,KU2,KU3,KP2,KP3,KL1),
4. Mahasiswa mampu menganalisis (C4) & melakukan perancangan (P4) sistem pengendalian otomatik menggunakan persaman ruang keadaan (state
space),sampai pada optimasi sistem, secara kreatif dalam kerjasama tim, serta menggunakan media TIK (KU1,KU2,KU3,KP2,KP3,KP4,KL1).
M.
Ke
Spesific Learning Objective
(Sub-Kompetensi)
Elemen Kompetensi dalam Asesmen
Jumlah
Soal
Bentuk
Cognitive Psikomotor Affective Asesmen %
C1 C2 C3 C4 C5 C6 P1 P2 P3 P4 P5 A1 A2 A3 A4 A5
1,2 Mahasiswa mampu menjelaskan pengertian
tentang dasar-dasar sistem pengendalian
dan beragam model system pengendalian.
Non-Tes :
· Root Map SPO.
· Poster tentang
SPO
(kreatifitas &
kompleksitas)
5 %
3 Mahasiswa mampu mengembangkan model
respons dinamik sistem orde satu, orde
dua, dan orde tinggi terhadap masukkan
step, ramp dan parabolik
Non-Tes :
· Program
MATLAB Model
Respon SPO.
10 %
11
12. · Membuat
diskripsi Model
Respon SPO.
4 Mahasiswa mampu merumuskan model
error system pengendalian otomatis.
Non-Tes :
· Program
MATLAB Model
rumusan error
SPO.
Membuat
diskripsi Model
rumusan error
SPO.
5,
6,
7
Mahasiswa mampu mengembangkan model
system pengendalian PID.
Non-Tes :
· Program
MATLAB Model
SPO-PID.
· Membuat
diskripsi Model
SPO-PID.
· Laporan
Praktikum
SPO-PID
Tes :
Lisan
20 %
8 Mahasiswa mampu menggunakan kreteria
kestabilan Routh-Hurwitz dan metoda
Root-Locus pada system pengendalian
otomatis.
Non-Tes :
Membuat
Analisa
kestabilan dg
Routh-Hurwitz
dan Root-Locus
secara manual
dan membuat
diskripsinya.
5%
9,10 Mahasiswa mampu menganalisis dan
melakukan perancangan sistem dgn
metoda respons frekuensi.
Non-Tes :
· Program
MATLAB
Perancangan
15 %
12
13. SPO berbasis
metoda
respons
frekuensi,
· Presentasi
Kelompok.
11,
12,
13,
14
Mahasiswa mampu melakukan perancangan
dan analisis sistem Pengendalian
menggunakan persamaan ruang keadaan.
Non-Tes :
· Program
SIMULINK-MATLAB
Perancangan
SPO
menggunakan
persamaan
ruang
keadaan,
20 %
15,
16
Mahasiswa mampu melakukan perancangan
optimasi pada sistem pengendalian
berdasarkan persamaan ruang keadaan.
Non-Tes :
· Program
MATLAB
Perancangan
SPO
menggunakan
persamaan
ruang
keadaan,
· Presentasi
Kelompok.
10 %
17 Ujian Tulis 4
20
Off-Line
On-Line (MC)
10 %
5 %
Jumlah Butir Soal 24
Prosentase 100%
Keterangan :
C1 : Knowledge P1 : Imitation A1 : Receiving
C2 : Comprehension P2 : Manipulation A2 : Responding
C3 : Application P3 : Precision A3 : Valuing
C4 : Analysis P4 : Articulation A4 : Organization
C5 : Syntesis & Evaluation P5 : Naturalisation A5 : Characterization
13
14. C6 : Creative
JADWAL AKTIVITAS BELAJAR MAHASISWA MATAKULIAH SISTEM PENGENDALIAN OTOMATIS
M.
Spesific Learning Objective
Ke
(Sub-Kompetensi)
Februari Maret April Mei Juni Aktivitas Pembelajaran Mhs.
[ Estimasi waktu]
1,2 Mahasiswa mampu menjelaskan
pengertian tentang dasar-dasar sistem
pengendalian dan beragam model
system pengendalian.
5 6 7 8 9 1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
· Kuliah & Brainstorming,
Diskusi kelompok,
[TM: 2x(4x50”)]
· (Tugas-1: Menyusun
Root Map Sistem
Pengendalian Otomatis)
[BT+BM:(1+1)x(4x50”)]
· (Tugas-2: Membuat
Poster Blok Diagram
Sistem Pengendalian
Otomatis)
[BT+BM:(1+1)x(4x50”)]
Batas Akhir Perubahan Mata Kuliah(27/2/09) ·
3 Mahasiswa mampu mengembangkan
model respons dinamik sistem orde
satu, orde dua, dan orde tinggi
terhadap masukkan step, ramp dan
parabolik
· Kuliah,
Diskusi kelompok,
[TM: 1x(4x50”)]
· (PS-1: Mengembangkan
model respon dinamika
SPO dg MATLAB)
[PS+BM:(1+)x(4x50”)]
14
15. 4 Mahasiswa mampu merumuskan model
error system pengendalian otomatis.
· Kuliah,
Diskusi kelompok,
[TM: 1x(4x50”)]
· (PS-2: Memodelkan
rumusan error SPO dg
MATLAB)
[PS+BM:(1+1)x(4x50”)]
5,
6,
7
Mahasiswa mampu mengembangkan
model system pengendalian PID.
·Kuliah,
Diskusi kelompok,
[TM: 2x(4x50”)]
·(PS-3: Mengembangkan
model SPO-PID dg
MATLAB)
[PS+BM:(2+2)x(4x50”)]
·(PL-1: Praktikum SPO-PID
dg PCT/ MiniPlant )
[PL+BM:(1+1)x(4x50”)]
8 Mahasiswa mampu menggunakan
kreteria kestabilan Routh-Hurwitz dan
metoda Root-Locus pada system
pengendalian otomatis.
· Kuliah,
Diskusi kelompok,
[TM: 1x(4x50”)]
· (Tugas-3:Analisa
kestabilan dg Routh-
Hurwitz dan Root-Locus
secara manual)
[BT+BM:2x(4x50”)]
9,
10
Mahasiswa mampu menganalisis dan
melakukan perancangan sistem dgn
metoda respons frekuensi.
· Kuliah,
Diskusi kelompok,
[TM: 2x(4x50”)]
· (PS-4: Merancang SPO
dg MATLAB berbasis
metoda respons
frekuensi)
[PS+BM:(2+2)x(4x50”)]
Batas Akhir Pembatalan Matakuliah(24/4/09) ·
11,
Mahasiswa mampu melakukan
12,
perancangan dan analisis sistem
· Kuliah,
Diskusi kelompok,
15
16. 13,
14
Pengendalian menggunakan persamaan
ruang keadaan.
[TM: 3x(4x50”)]
· (PS-5: Merancang SPO
dg SIMULINK-MATLAB
menggunakan
persamaan ruang
keadaan)
[PS+BM:(3+3)x(4x50”)]
Presentasi & Diskusi
kelompok
[TM+BT:2x(4x50”)]
[BM:1x(4x50”)]
15,
16
Mahasiswa mampu melakukan
perancangan optimasi pada sistem
pengendalian berdasarkan persamaan
ruang keadaan.
· Kuliah,
Diskusi kelompok,
[TM: 2x(4x50”)]
· (PS-6: Merancang
optimasi SPO dg
MATLAB menggunakan
persamaan ruang
keadaan)
[PS+BM:(2+2)x(4x50”)]
Libur Akademik (Minggu Tenang)
17 Ujian Tulis Off Line(ujian tulis)
On Line(SHARE-ITS)
Pengumumam Nilai Akhir (29/6/2009)
16
17. LAMPIRAN 1
PROGRAM MAPPING
Title : Sistem Pengendalian Otomatis
Description : Mata kuliah SPO merupakan mata kuliah dengan kompetensi Mahasiswa mampu memodelkan sistem,
mengkarakteristikkan dan melakukan perancangan serta menganalisis sistem pengendalian automatis
dengan logika yang benar baik secara mandiri atau juga dalam kerjasama tim. Materi pada pokok bahasan ini
diawali dengan mahasiswa mengakses beberapa sumber ajar yang telah tersedia di www.share.its.ac.id. Sumber ajar
telah ter upload dalam bentuk: html, ppt, pdf, Video tentang sistem pengendalian yang ada di Workshop
Instrumentasi. Selanjutnya pada minggu ke 7 dilakukan Vicon dengan PT mitra 1 untuk penerapan dari
perancangan sistem pengendalian pada salah satu miniplant yang ada di Workshop. Dalam Vicon diawali oleh
pengantar dari praktisi, dilanjutkan dalam kajian teoritis dan dipandu oleh seorang sutradara dalam menunjukkan
beberapa sumber ajar
Learning Objectives : Setelah mengikuti matakuliah ini mahasiswa akan dapat memodelkan sistem, mengkarakteristikan dan
merancang sistem pengendalian otomatis berdasarkan spesifikasi respon waktu.
Course Method : VC Blended Learning: 20%VC, 80 %Web-based Learning
17
19. 19
No Kompetensi Dasar (TIK) Pokok Bahasan F2F Video
Conference
Web Based
Course
1 Mampu menjelaskan konsep dasar dan
istilah – istilah dalam sistem pengendalian
otomatis dengan aplikasinya.
1.1. Istilah – Istilah Sistem Pengendalian Otomatis -
1.2. Sistem Pengendalian Loop Terbuka
1.3. Sistem Pengendalian Loop Tertutup
2 Mampu menjelaskan macam – macam
komponen sistem pengaturan beserta
fungsinya
2.1. Error Detektor -
2.2. Kontroler -
2.3. Aktuator -
2.4. Sensor dan Tranduser -
3 Mampu memodelkan secara matematik
suatu sistem dinamik
3.1. Definisi Transformasi Laplace -
3.2. Sifat – Sifat Transformasi Laplace -
3.3. Transformasi Laplace Balik -
3.4. Persamaan Differensial Linier Koefisien Konstan -
3.5. Persamaan Keadaan -
3.6. Fungsi Transfer -
3.7. Diagram Blok -
3.8. Reduksi Diagram Blok -
3.9. Grafik Aliran Sinyal -
3.10. Penguatan Mason -
3.11. Model Matematika Sistem Mekanik -
3.12. Model Matematika Sistem -
Elektrik
3.13. Model Matematika Sistem Permukaan Zat Cair -
3.14. Model Matematika Sistem Mekatronik -
3.15. Model Matematika Sistem Thermal -
4 Mampu menjelaskan karakteristik respon
sistem terhadap sinyal masukan tertentu
4.1. Karakteristik Sistem -
4.2. Karakteristik Sistem orde Pertama -
4.3. Karakteristik Sistem Orde kedua -
4.4. Karakteristik Sistem Orde Tinggi -
4.5. Kriteria Kestabilan Routh -
5 Mampu menjelaskan kontroler PID dan
realisasi rangkaian PID dengan benar
5.1. Kontroler Proporsional -
5.2. Kontroler Integral -
5.3. Kontroler Proporsional ditambah Integral (PI)
5.4. Kontroler Proporsional ditambah Differensial (PD) -
5.5. Kontroler Proporsional ditambah Integral ditambah
Differensial (PID)
6 Mampu merancang kontroler PID dengan
spesifikasi domain waktu secara tepat
6.1. Desain Kontroler Proporsional -
6.2. Desain Kontroler Proporsional ditambah Integral (PI) -
6.3. Desain Kontroler Proporsional ditambah Differensial (PD) -
6.4. Desain Kontroler Proporsional ditambah Differensial
-
Modifikasi
6.5. Desain Kontroler Proporsional ditambah Integral ditambah
Differensial
-
6.6. Desain Kontroler Proporsio nal ditambah Integral ditambah
Differensial Modifikasi
-
6.7. Desain Kontroler PID Ziegler - Nichols -
7 Mahasiswa mampu melakukan
perancangan dan analisis sistem
7.1 Pemodelan dalam persamaan ruang keadaan, -
20. LAMPIRAN 2
Video Conference Form
No. Kompetensi Dasar Pokok Bahasan Skenario Interaksi Tugas Waktu Referensi
1 Memiliki
kemampuan
menjelaskan istilah–
istilah dalam sistem
pengendalian
otomatis dengan
benar
a. Sistem
Pengendalian Loop
Terbuka
b. Sistem
Pengendalian Loop
Tertutup
1, Persiapan terkoneksi
dengan PT mitra, dosen
berada terhubung
dengan media
komunikasi, contoh
sistem di laboratorium
siap untuk di"run",
sumber ajar siap untuk
diakses
2. Video Conference
dimulai
3. Acara pembukaan
dipimpin oleh moderator
dan perkenalan dosen
pengajar. Dosen dengan
mereview kembali
kompetensi dasar yang
harus dicapai oleh mhs,
menyebutkan sumber
ajar yang ada, dengan
menyebut satu per satu
sumber ajar yang
dimaksud
4. Penyampaian materi
pembelajaran
5. Diskusi tanya jawab
6. Penutup
1. Antara dosen
di ITS dengan
peserta didik di
PT mitra
2. Antara
Peserta didik di
ITS dengan
peserta didik di
PT Mitra
Merefleksi
materi yang
telah
disampaikan
melalui Video
Conference
dengan cara
mencari studi
kasus baru yang
terkait
2X50
menit
- Ogata, Katsuhiko: Modern Control
Engineering,5th Ed., Prentice-Hall, 2009
- http://www.uotechnology.edu.iq/dep-eee/
lectures/3rd/Shared%20all/Control
%20engineering/part1.pdf
-
http://www.cseiq.org/pdf_files/1230710
656_Control%20Lectures.pdf
- Buku “Sistem Pengendalian Modern”,
Aulia SA dkk, hal. 1-176
2 Mampu menjelaskan
kontroler PID dan
realisasi rangkaian
PID dengan benar
6.2. Desain Kontroler
Proporsional
ditambah Integral
(PI)
6.5. Desain Kontroler
1. 1. Persiapan terkoneksi
dengan PT mitra, dosen
berada terhubung
dengan media
komunikasi, contoh
sistem di laboratorium
1. Antara dosen
di ITS dengan
peserta didik di
PT mitra
2. Antara
Peserta didik di
Merefleksi
materi yang
telah
disampaikan
melalui Video
Conference
2X50
menit
- Ogata, Katsuhiko: “Modern Control
Engineering”, 5th Ed., Prentice-Hall
- PID Control, Araki M.
http://www.eolss.net/ebooks/Sample
%20Chapters/C18/E6-43-03-03.pdf
20
21. No. Kompetensi Dasar Pokok Bahasan Skenario Interaksi Tugas Waktu Referensi
Proporsional
Proporsional
ditambah Integral
ditambah
Differensial (PID)
siap untuk di"run",
sumber ajar siap untuk
diakses
2. Video Conference
dimulai
3. Acara pembukaan
dipimpin oleh moderator
dan perkenalan dosen
pengajar. Dosen dengan
mereview kembali
kompetensi dasar yang
harus dicapai oleh mhs,
menyebutkan sumber
ajar yang ada, dengan
menyebut satu per satu
sumber ajar yang
dimaksud
4. Penyampaian materi
pembelajaran
5. Kamera difokuskan
pada miniplant boiler di
workshop instrumentasi,
sambil asisten lab.
Menjelaskan bagian -
bagian dari miniplant
6. Asisten menjalankan
boiler, kamera
difokuskan pada
indikator sistem
monitoring suhu
7. Asisten menghentikan
sistem pada boiler
8. Dosen memberikan
kesimpulan dari proses
dan sistem pengendalian
yang terjadi
9. Diskusi tanya jawab
ITS dengan
peserta didik di
PT Mitra
dengan cara
mencari studi
kasus baru yang
terkait
- PID Control, Karl Johan Amstrong
http://www.cds.caltech.edu/~murray/cou
rses/cds101/fa02/caltech/astrom-ch6.pdf
21
22. No. Kompetensi Dasar Pokok Bahasan Skenario Interaksi Tugas Waktu Referensi
10. Penutup
22