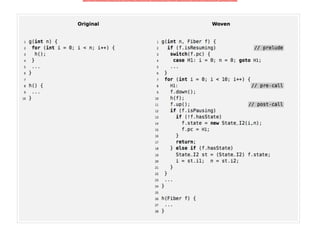
The document discusses the concept of communicating state machines (CSMs) and their applications in various programming contexts, including C++ and TinyOS. It covers synchronous and asynchronous communication, state management, and the advantages of different programming paradigms like event-driven and functional programming. Additionally, it highlights the importance of optimizing performance in concurrent systems and presents examples using languages such as Erlang, Ruby, and Go.


![Stacks as State Machines
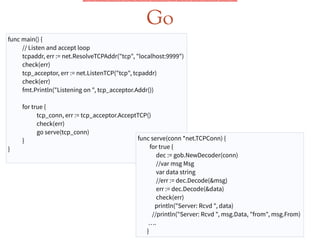
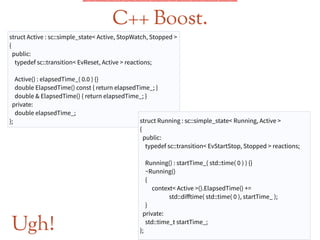
void readMsgs( socket) {
numMsgsRead = 0
while (true) {
msg = readMsg(socket)
dispatch(msg)
log(numMsgsRead++)
}
}
void readMsg(socket) {
len := readLen(socket)
readBody(len)
}
void readLen(socket) {
byte[4] len
for i = 0 .. 4 {
len[i] = readByte(socket)
}
return len
}
• Thread of control
• Control plane = Call Chain (each frame
remembers its pc)
• Sequential flow of control defines hidden states
• Functions define major states
• Data plane = Vars local in each frame
• Blocking semantics == synchronous (lock-
step) communication
• readByte and dispatch interact with network
• Easy API; that’s why Posix and most db
calls are synchronous](https://image.slidesharecdn.com/coroutinesthreadsmeetup-140613133556-phpapp01/85/Communicating-State-Machines-11-320.jpg)