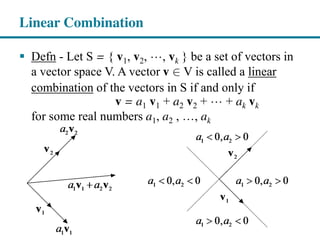
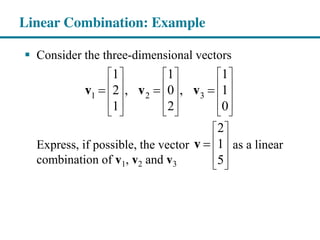
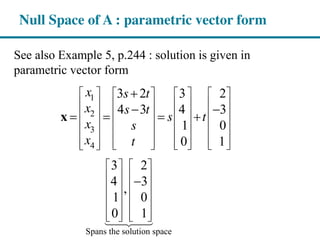
This document discusses linear combinations and independence of vectors. It defines linear combinations as vectors that can be expressed as a sum of other vectors with scalar coefficients. A set of vectors is linearly dependent if one vector can be written as a linear combination of the others, and linearly independent otherwise. The span of a set of vectors is the set of all their linear combinations, and spans the entire space if and only if the vectors are independent. The null space of a matrix contains vectors that solve the homogeneous equation Ax=0. Examples demonstrate determining if sets of vectors are linearly dependent or independent.
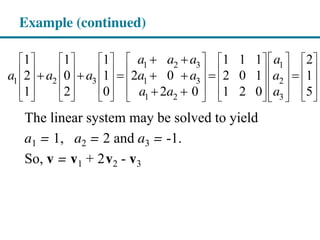
![Are the vectors w and z in Span{v1, v2}
where
v1=[1,0,3] ; v2=[-1,1,-3] ;
and
w=[1,2,3] ; z=[2,3,4] ?
Span](https://image.slidesharecdn.com/math211chapter4part2-180103165953/85/Chapter-4-Vector-Spaces-Part-2-Slides-By-Pearson-9-320.jpg)
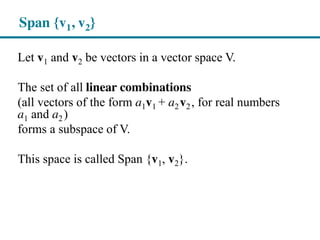
![Example of Set that is not a Subspace
Set of all vectors in R3 of the form: [3t+1, t, -2t]
-- zero vector is not of that form
Set of all vectors in R2 of the form: [t, t*t]
-- sum of such two vectors does not have that form:
Try t=1 and t=2.](https://image.slidesharecdn.com/math211chapter4part2-180103165953/85/Chapter-4-Vector-Spaces-Part-2-Slides-By-Pearson-11-320.jpg)
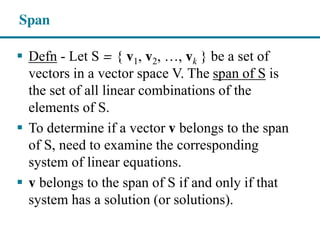
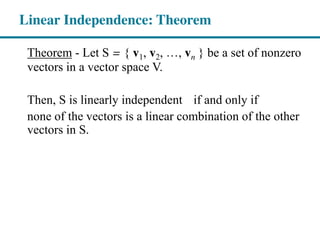
![Let S = { v1, v2, , vk } be a set of distinct
vectors in a vector space V.
Then S is said to be linearly dependent
if and only if the homogeneous system Ax = 0
has infinitely many solutions
where x Î∈ Rk and xi = ai i=1,…k
A = [ v1 v2 vk ]
vi are column vectors of A
Linear Dependence: Matrix form](https://image.slidesharecdn.com/math211chapter4part2-180103165953/85/Chapter-4-Vector-Spaces-Part-2-Slides-By-Pearson-17-320.jpg)
![Let S = { v1, v2, , vk } be a set of distinct
vectors in a vector space V.
Then S is said to be linearly independent
if and only if the homogeneous system Ax = 0
has a unique solution x = 0
where x Î∈ Rk and xi = ai i=1,…k
A = [ v1 v2 vk ]
vi are column vectors of A
Linear Independence: Matrix form](https://image.slidesharecdn.com/math211chapter4part2-180103165953/85/Chapter-4-Vector-Spaces-Part-2-Slides-By-Pearson-21-320.jpg)
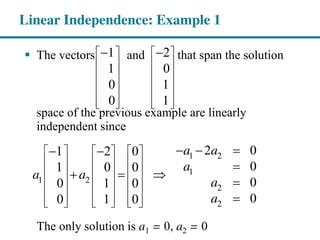
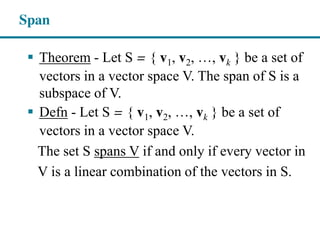
![Let V be R4 and v1 = [1, 0, 1, 2], v2 = [0, 1, 1, 2]
and v3 = [1, 1, 1, 3]. Determine if S = { v1, v2, v3 }
is linearly independent or linearly dependent
1 3
2 3
1 1 2 2 3 3
1 2 3
1 2 3
0
0
0
2 2 3 0
a a
a a
a a a
a a a
a a a
v v v 0
Subtract second equation from third and get a1 = 0.
The first equation gives a3 = 0, then the second
equation gives a2 = 0. So, the vectors are linearly
independent.
Linear Independence: Example 2](https://image.slidesharecdn.com/math211chapter4part2-180103165953/85/Chapter-4-Vector-Spaces-Part-2-Slides-By-Pearson-24-320.jpg)