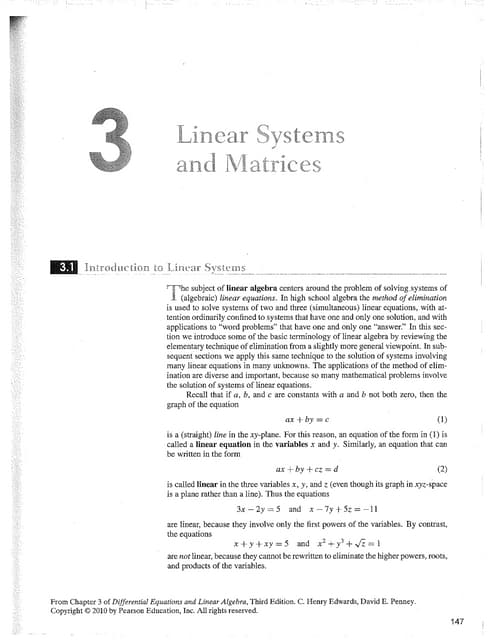
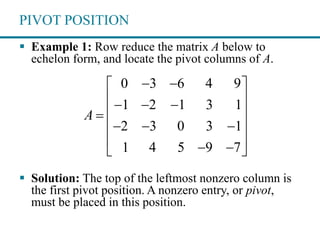
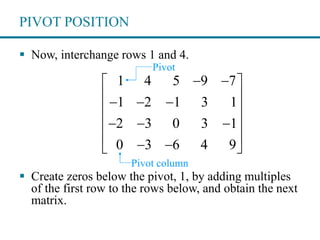
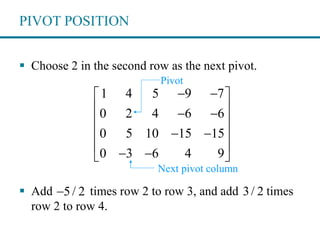
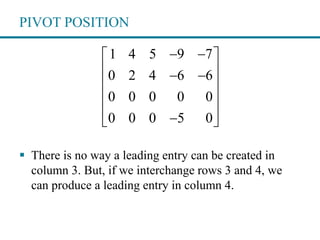
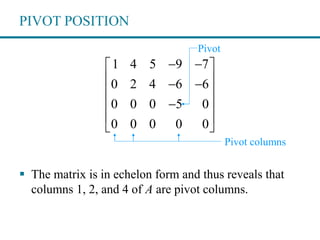
The document provides information about linear systems and matrices. It begins by defining linear and non-linear equations. It then discusses systems of linear equations, their graphical and geometric interpretations, and the three possible solutions: no solution, a unique solution, or infinitely many solutions. The document also covers matrix notation for representing linear systems, elementary row operations for transforming systems, and determining whether a system has a solution and whether that solution is unique.
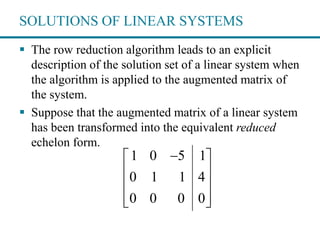
![Equivalent Linear Systems
Two linear systems are EQUIVALENT
if and only if
they have the same solution sets.
Ex: x – y = 1 and x – y = 1
x + y = 3 y = 1
vector [2, 1] is the unique solution for both systems
Note that the second system is easier to solve !](https://image.slidesharecdn.com/3-180103164804/85/Chapter-3-Linear-Systems-and-Matrices-Part-1-Slides-15-320.jpg)
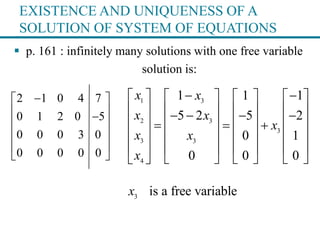
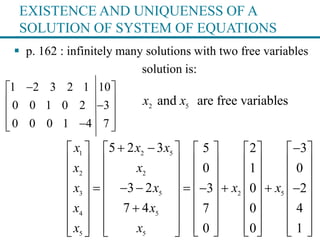
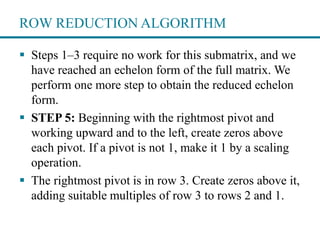
![EXISTENCE AND UNIQUENESS THEOREM
Theorem 2: Existence and Uniqueness Theorem
A linear system is consistent if and only if the
rightmost column of the augmented matrix is not a
pivot column—i.e., if and only if an echelon form of
the augmented matrix has no row of the form
[0 … 0 b] with b nonzero.
If a linear system is consistent, then the solution set
contains either (i) a unique solution, when there are
no free variables, or (ii) infinitely many solutions,
when there is at least one free variable.](https://image.slidesharecdn.com/3-180103164804/85/Chapter-3-Linear-Systems-and-Matrices-Part-1-Slides-68-320.jpg)