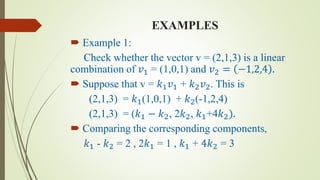
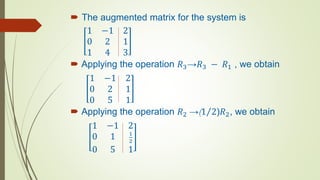
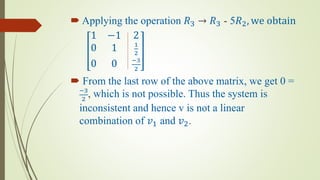
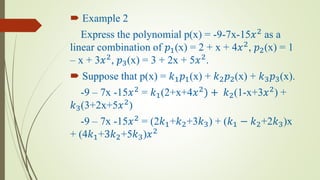
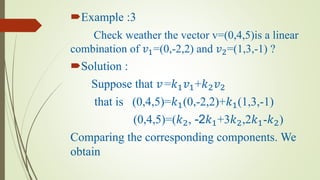
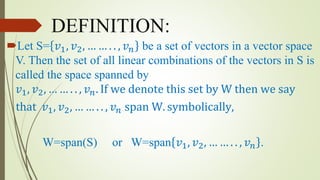
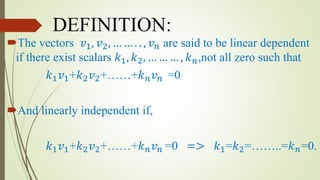
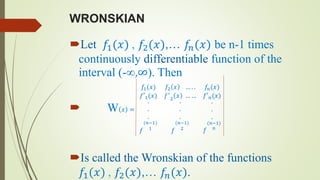
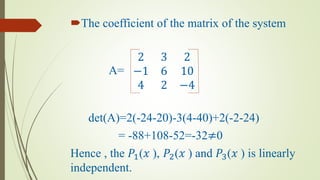
The document discusses linear combinations and linear independence of vectors and functions. It defines a linear combination of vectors as a vector that can be expressed as a sum of scalar multiples of other vectors. A set of vectors is linearly dependent if one vector can be written as a linear combination of the others. A set is linearly independent if the only solution to the equation involving scalar multiples of the vectors is when all scalars are zero. It also discusses the Wronskian and its use in determining linear independence of functions. Examples are provided to illustrate these concepts.