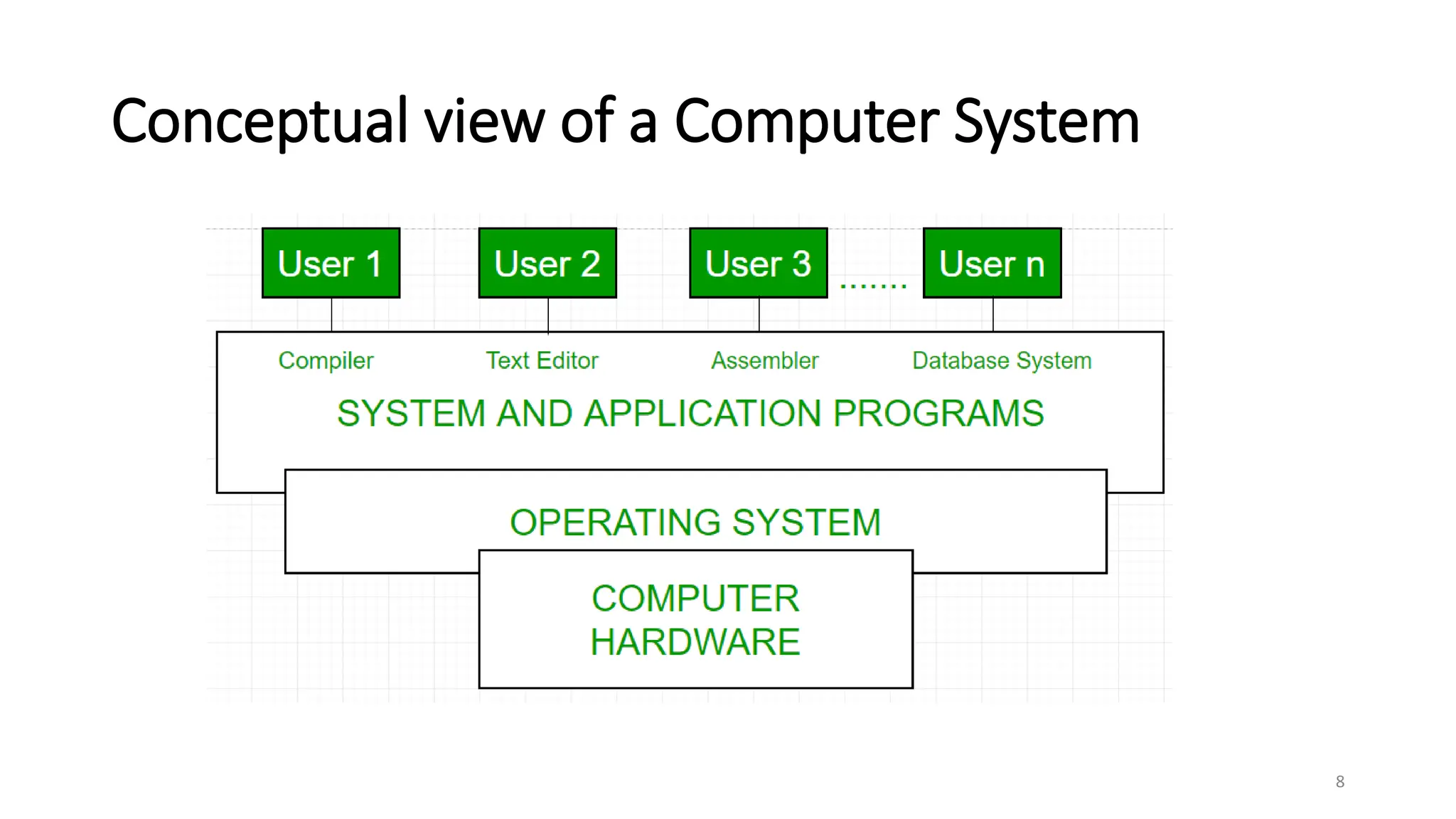
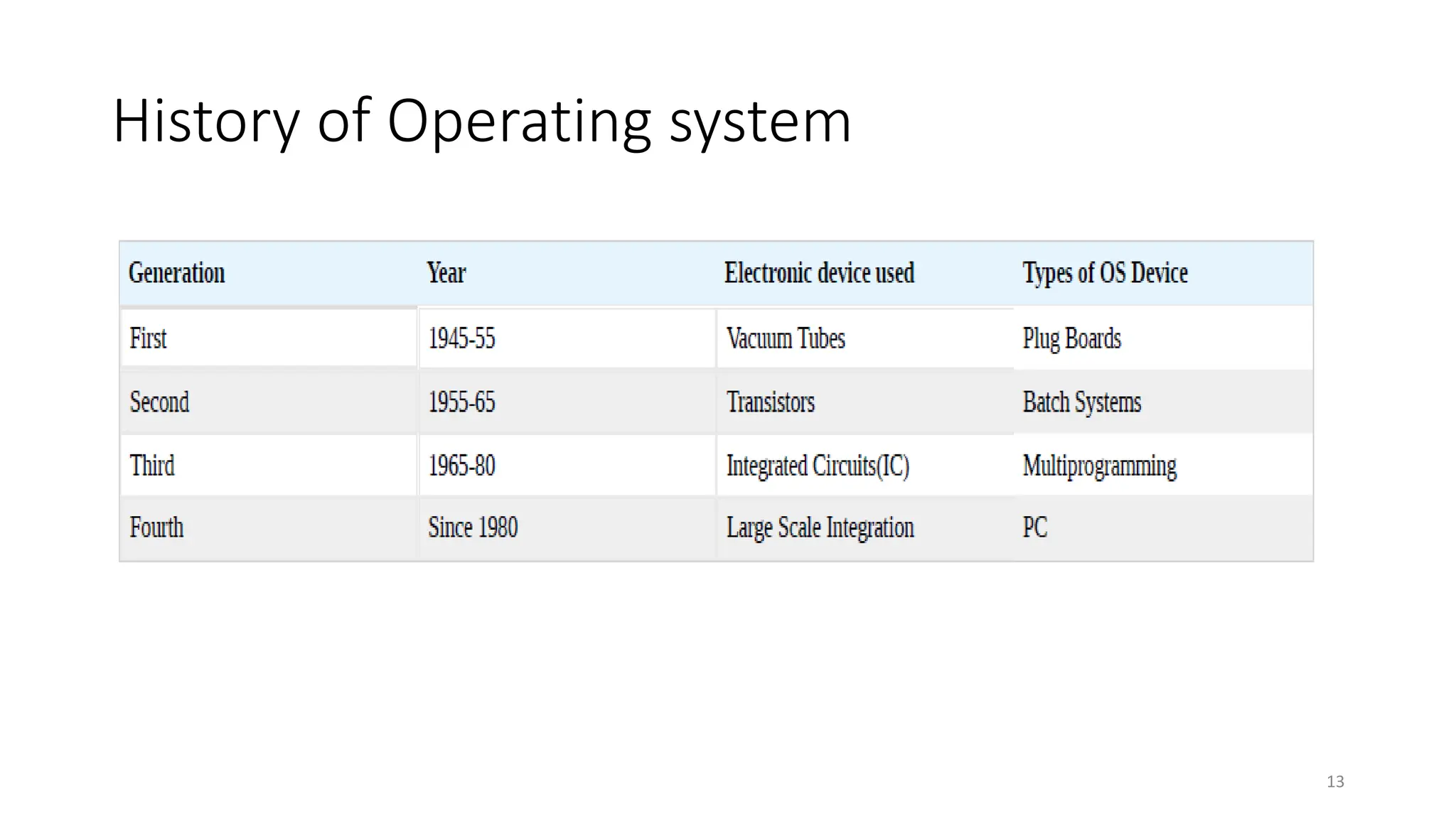
The document discusses the basic roles and functions of an operating system. It states that an operating system controls application programs, acts as an interface between the user and computer hardware, and manages resources like memory, processors, and devices. It describes some key functions of an operating system including providing convenience, efficiency, security, memory management, processor management, device management, and file management. It also discusses the history of operating systems and provides an overview of basic computer hardware components like the processor, memory, I/O modules, and data transfer methods.