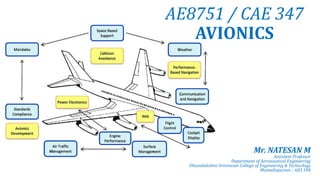
This document provides an overview of the objectives and content of an avionics course. The objectives are to introduce avionics basics and subsystems, impart knowledge of avionics architecture and data buses, and gain understanding of navigation and autopilot systems. The first unit covers the introduction to avionics, including the need for avionics in civil and military aircraft, integrated avionics and weapon systems, and typical avionics subsystems and technologies. It also defines avionics and discusses the growth of avionics to replace mechanical equipment.