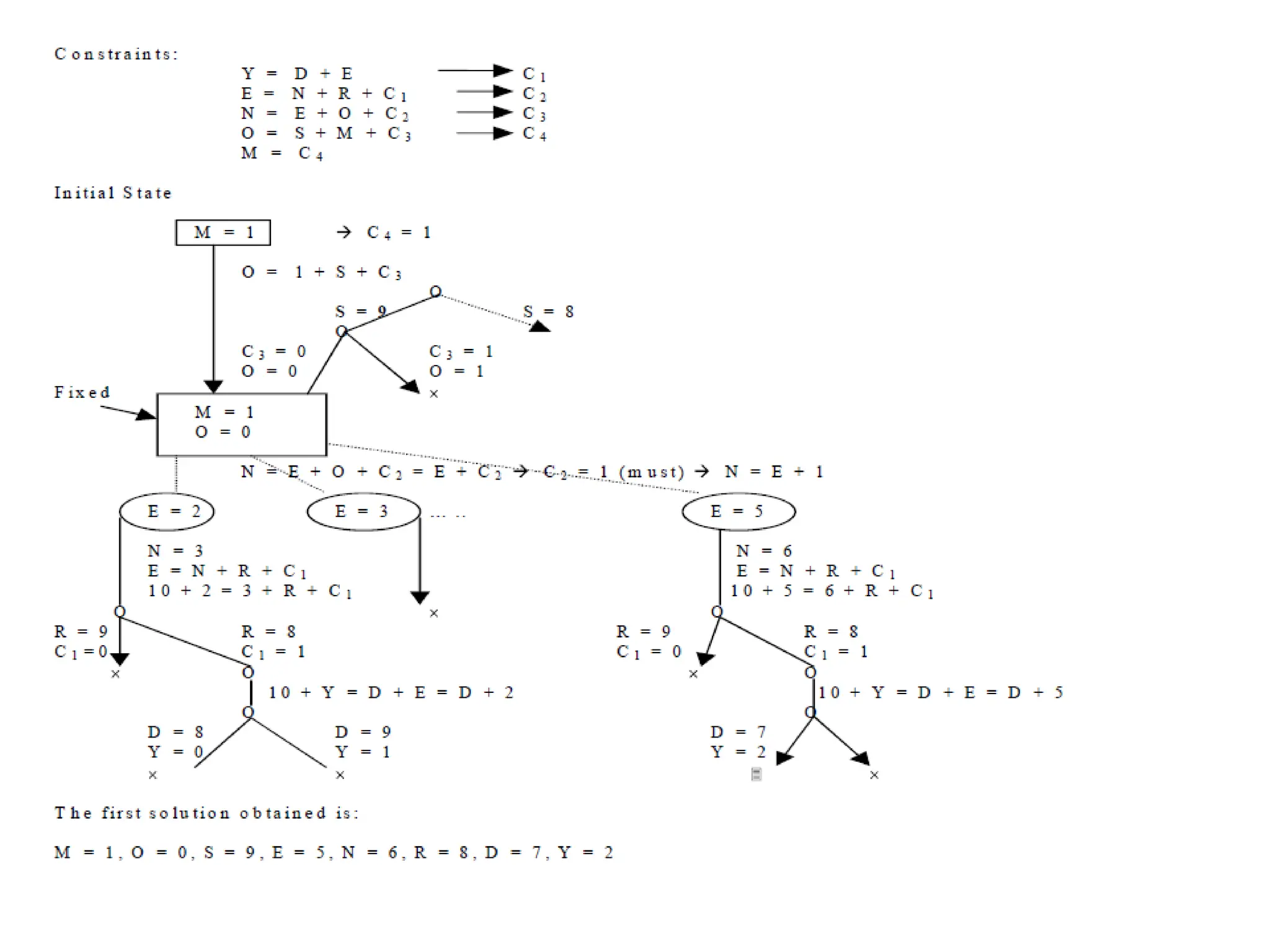
The document discusses constraint satisfaction problems (CSPs), which are defined by variables with specific domains and constraints that determine valid combinations of values. Various types of CSPs are outlined, including discrete and continuous variables, as well as techniques for solving them such as backtracking search, variable assignment heuristics, and constraint propagation methods like arc consistency. The focus is on improving the efficiency of solving CSPs through structured algorithms and strategies.
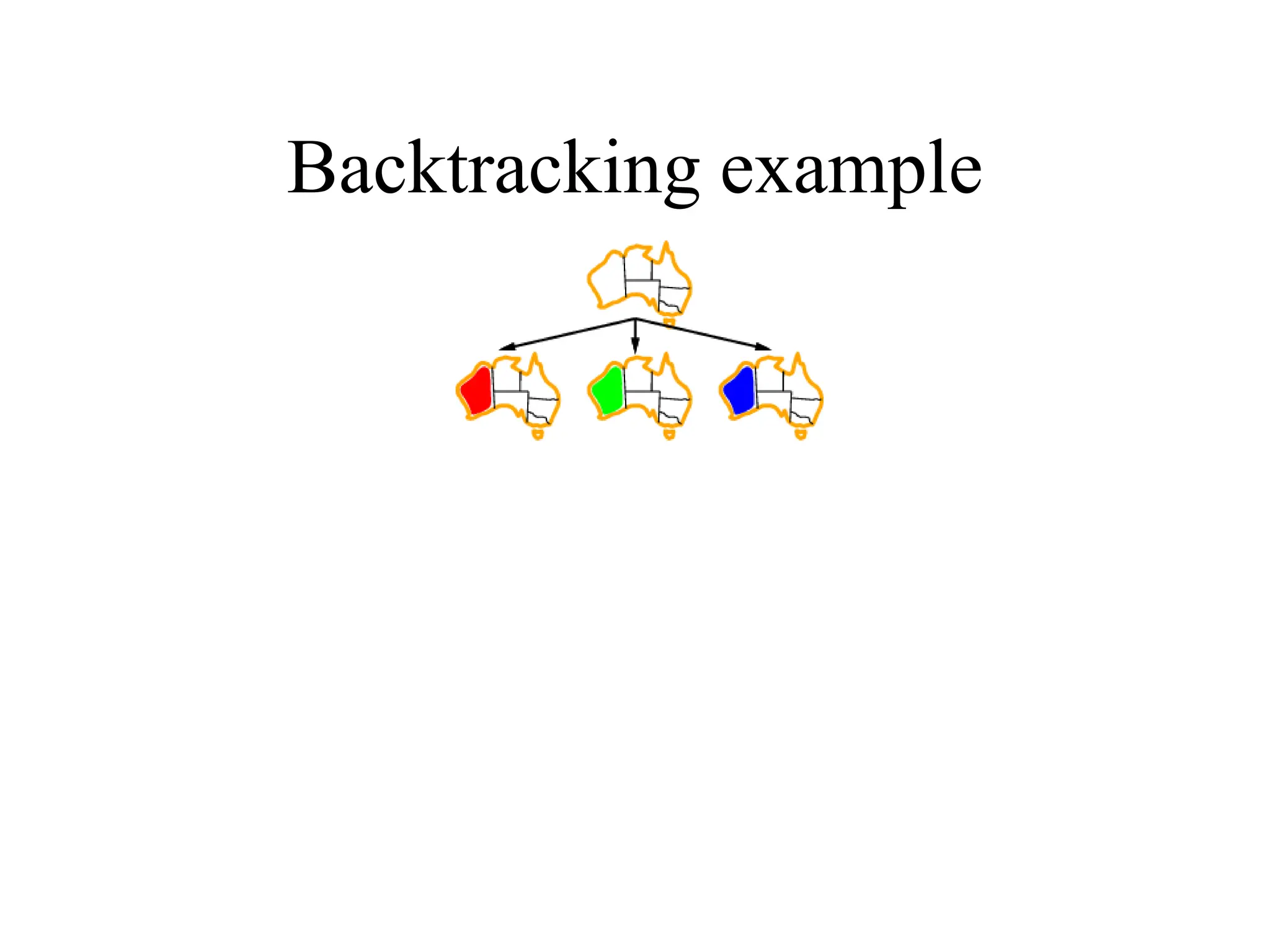
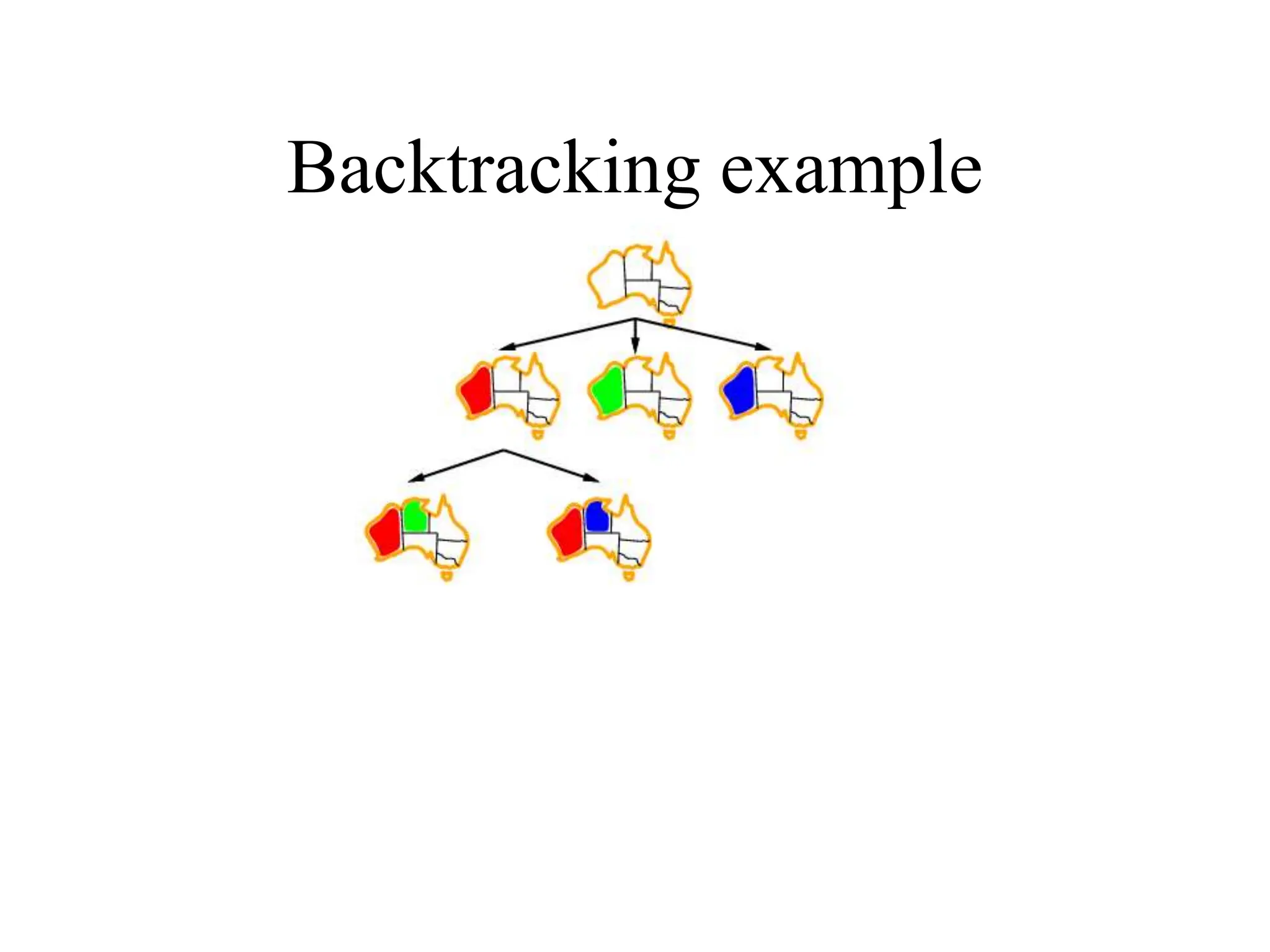
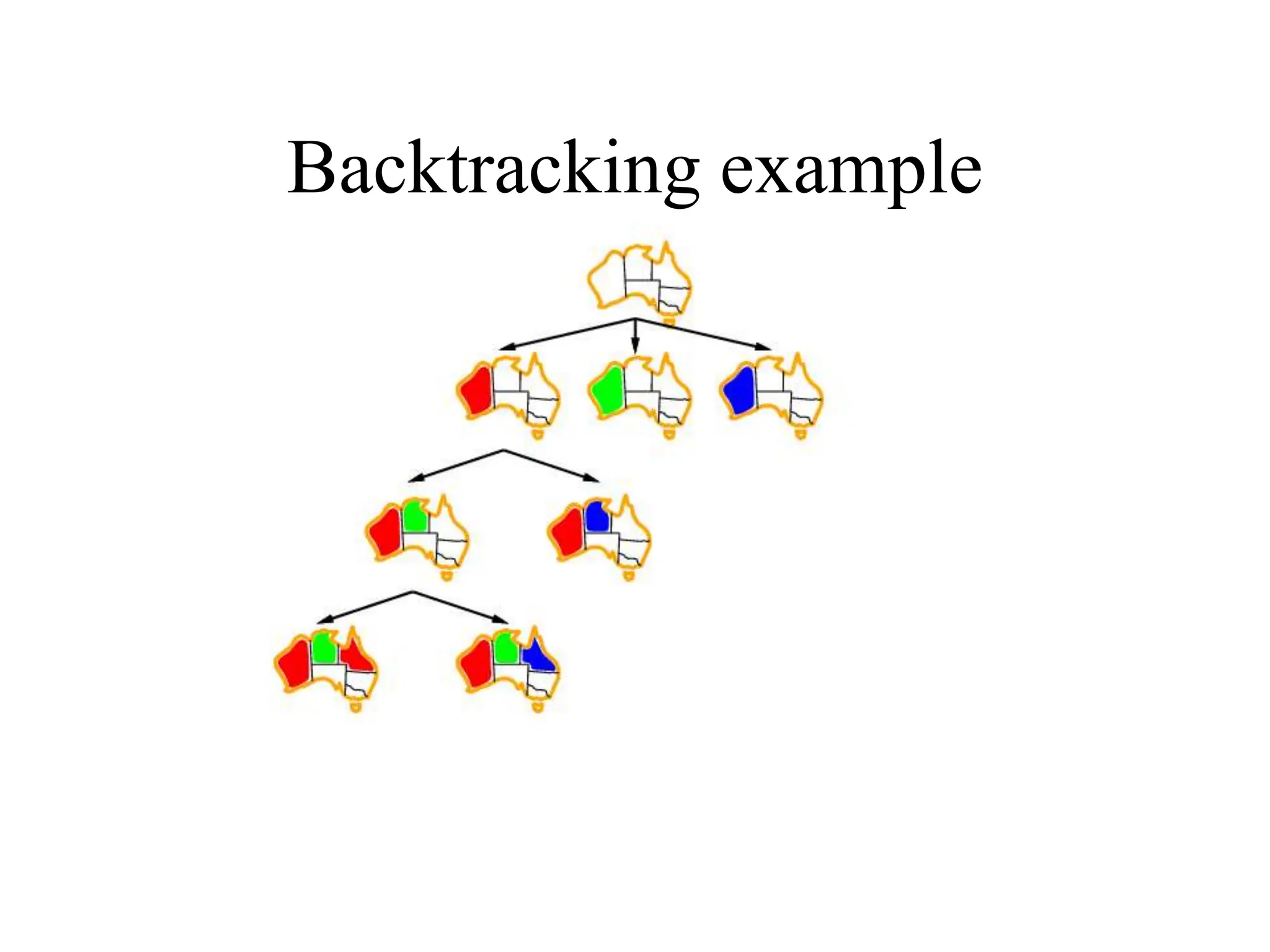
![Backtracking search
• Variable assignments are commutative, i.e.,
[ WA = red then NT = green ] same as [ NT = green then WA = red ]
• => Only need to consider assignments to a single variable at
each node
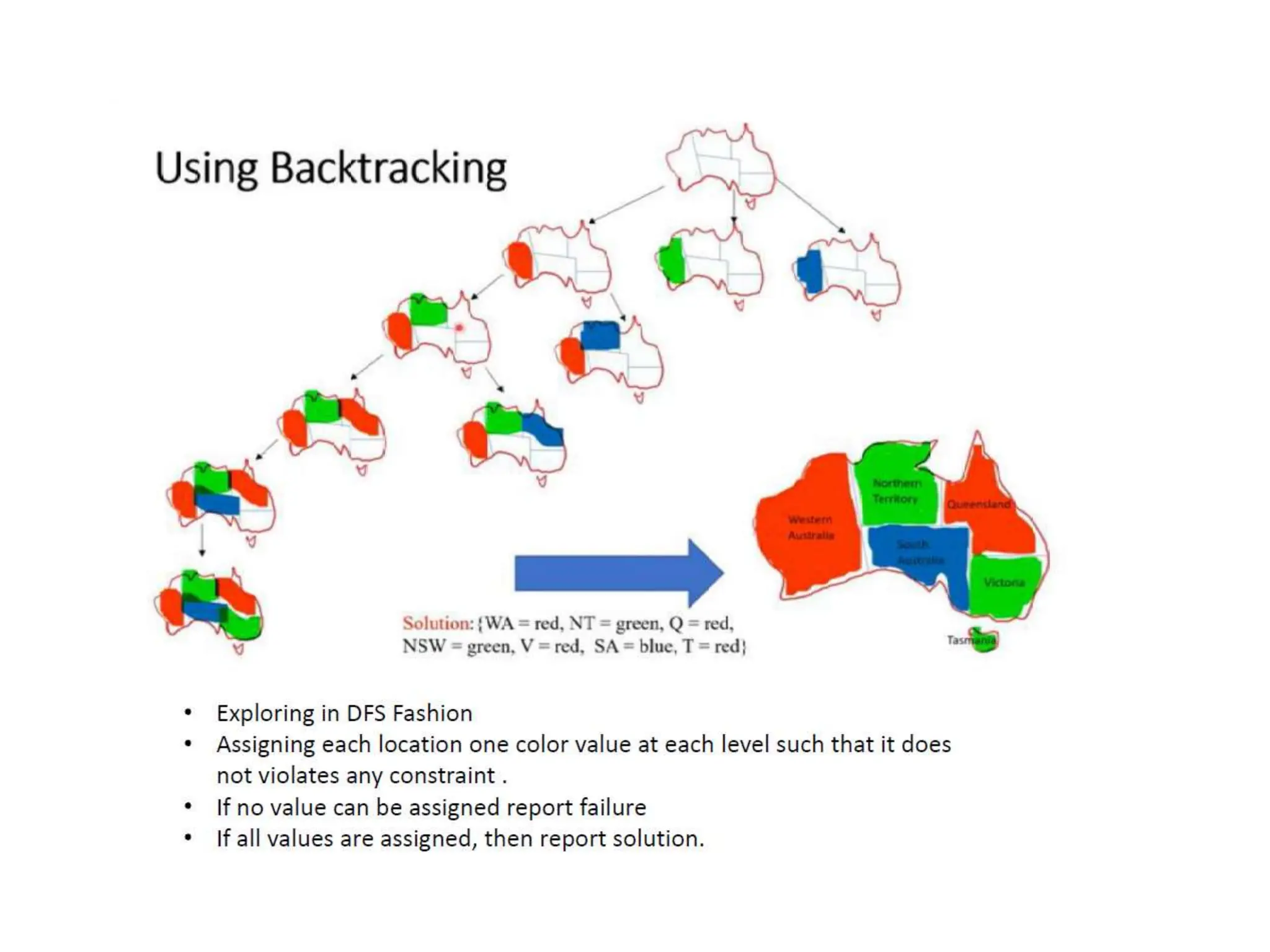
• Depth-first search for CSPs with single-variable assignments
is called backtracking search
• Can solve n-queens for n ≈ 25](https://image.slidesharecdn.com/067ff1a8-552a-4fff-b240-a00d2be1814d-240702065850-a32d7bb1/75/A-PPT-on-Constraint-Satisfaction-problems-8-2048.jpg)