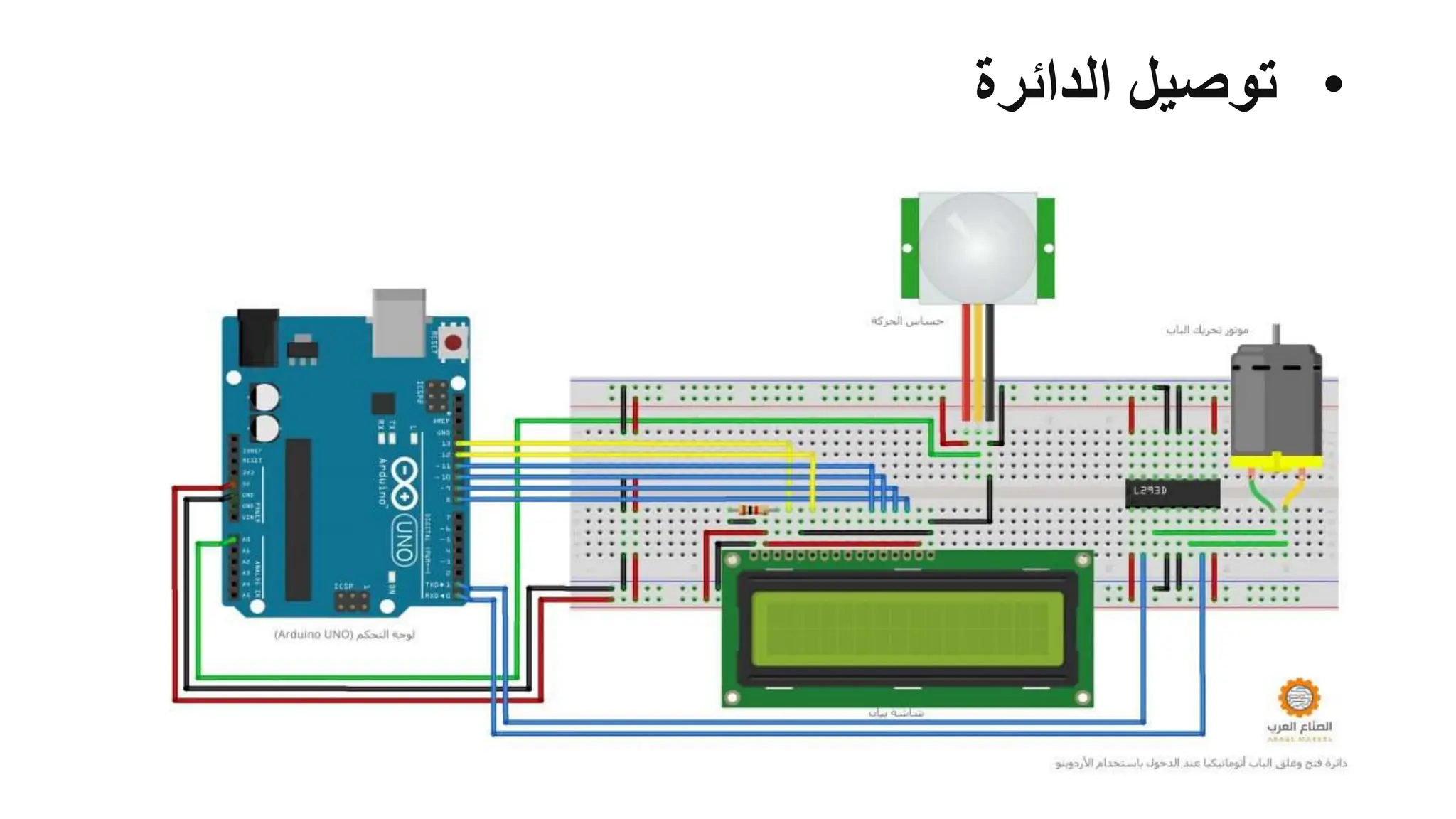
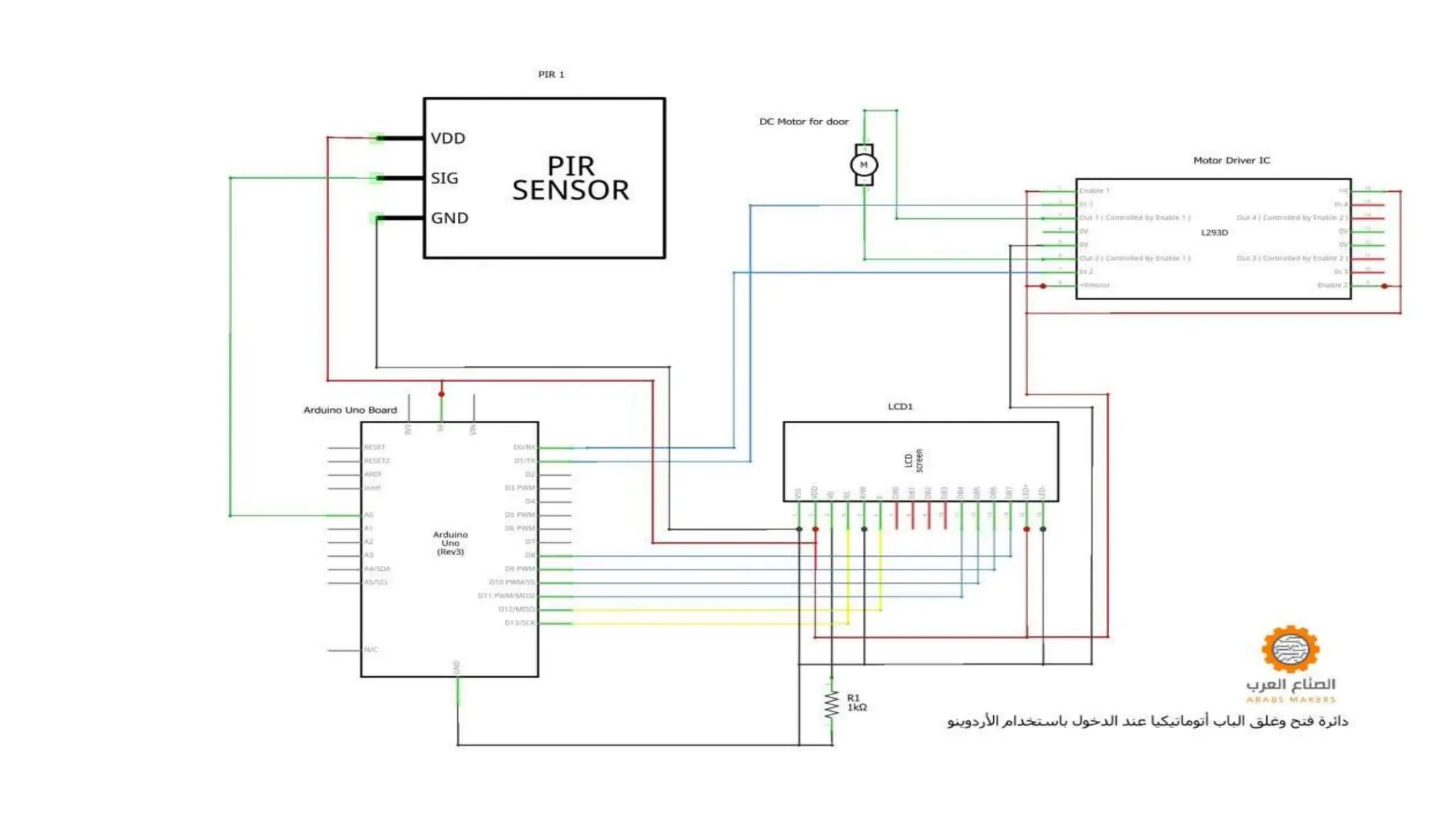
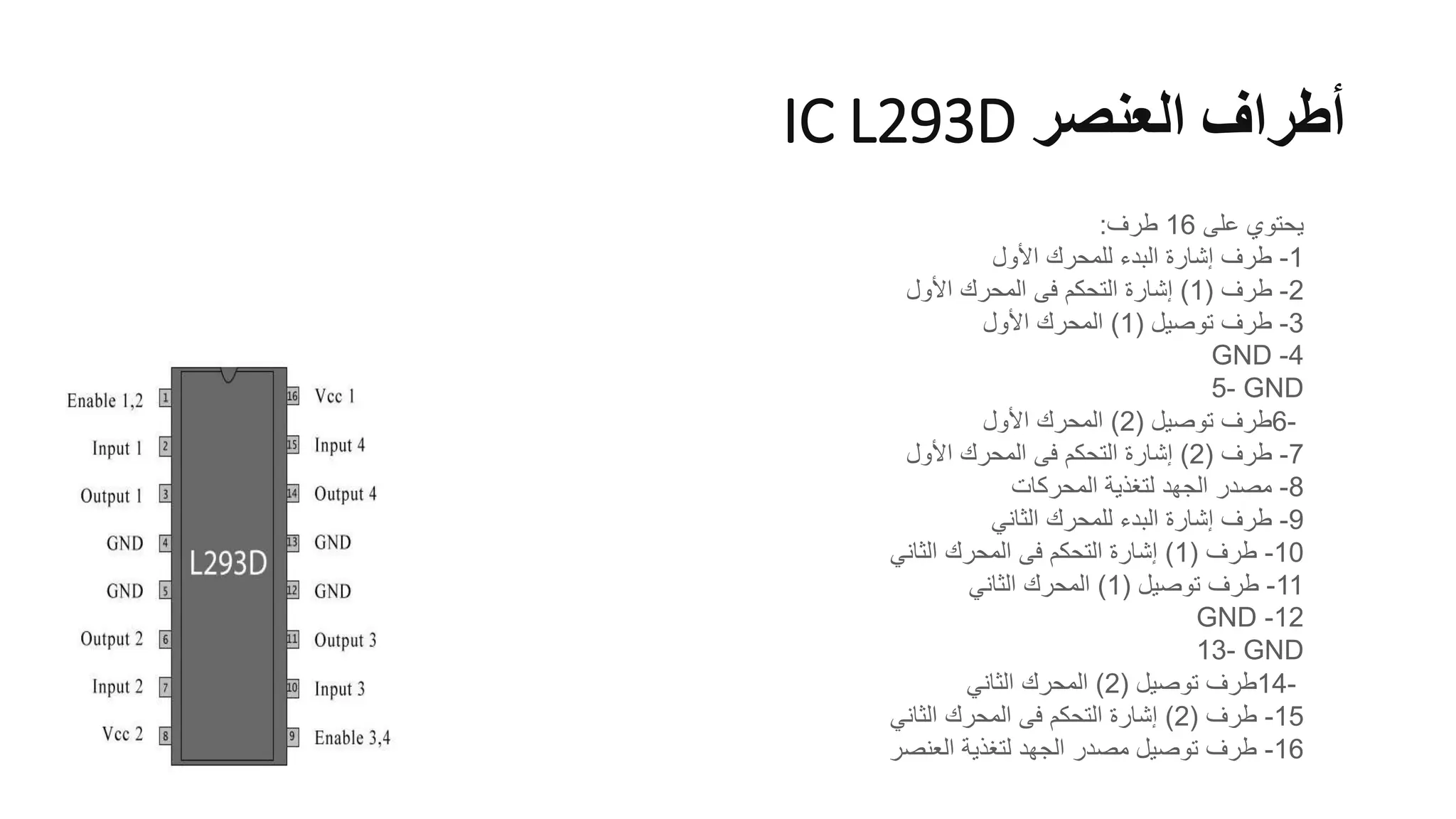
المشروع يهدف إلى تشغيل باب آلي باستخدام لوحة أردوينو وحساس حركة، حيث يتم فتح وغلق الباب عند اقتراب شخص. يتكون المشروع من عدة مكونات تشمل شاشة LCD وحساس PIR ومحرك DC ودائرة IC للتحكم في المحرك. يتضمن المشروع توصيل هذه المكونات وكتابة كود برمجي للتحكم في سلوك الباب.