Download to read offline
![d. Gunakan program berikut
#include <mega8535.h>
#include <delay.h>
// Alphanumeric LCD functions
#include <alcd.h>
#include <stdio.h>
unsigned char lcd[16];
unsigned char data,pwm,a;
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
// Place your code here
a++;
if(a<=pwm){PORTC.1=0;}
else {PORTC.1=1;}
}
#define ADC_VREF_TYPE 0x20
// Read the 8 most significant bits
// of the AD conversion result
unsigned char read_adc(unsigned char adc_input)
{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCH;
}](https://image.slidesharecdn.com/13-141209070426-conversion-gate01/75/13-interfacing-motor-dc-2-2048.jpg)
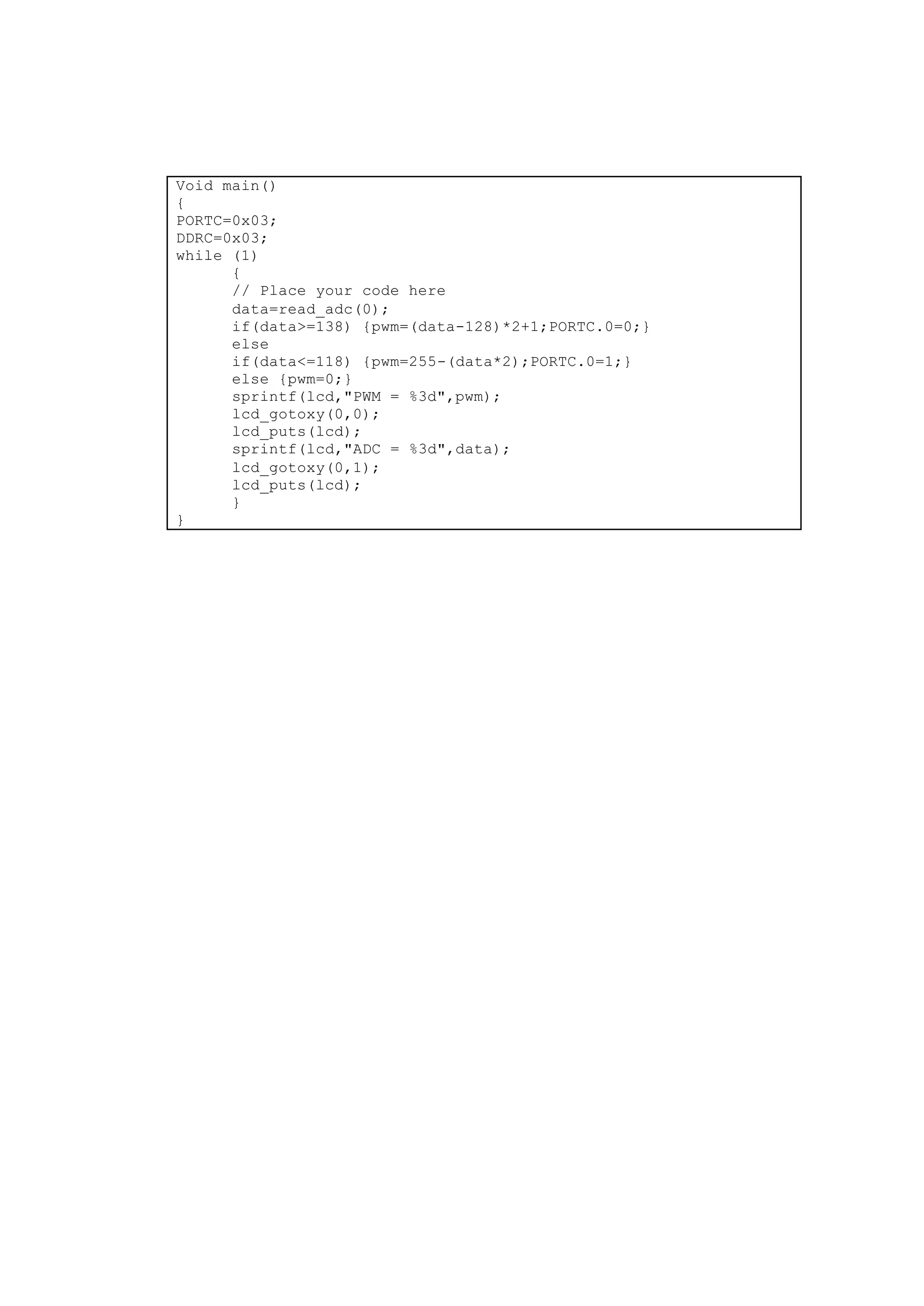

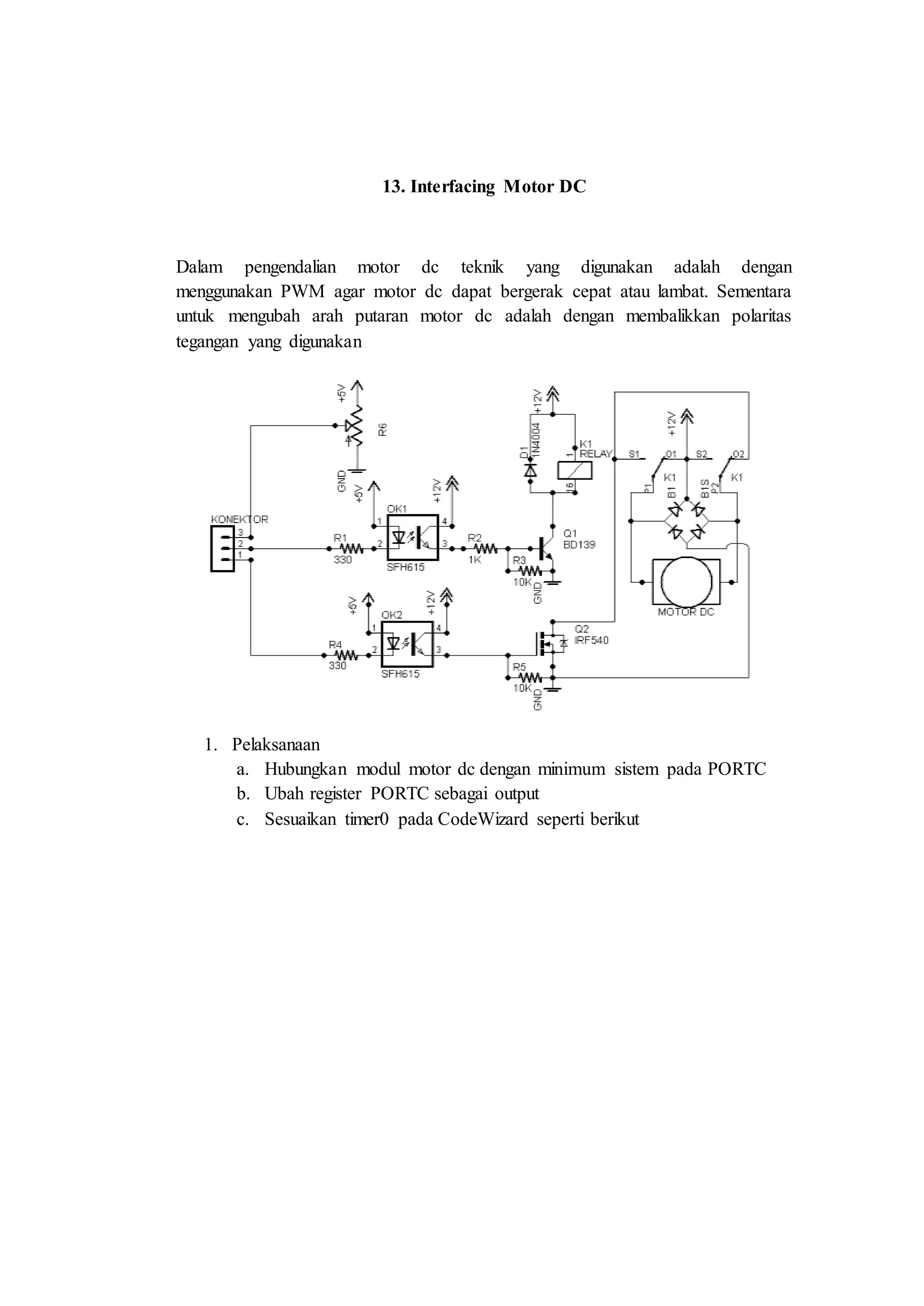
Dokumen ini membahas cara mengendalikan motor DC menggunakan PWM dan mengubah arah putarannya dengan membalikkan polaritas tegangan. Program menggunakan timer 0 dan ADC untuk mengatur kecepatan motor berdasarkan nilai tegangan yang dibaca.















