Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
スケルトニクス プロジェクト
PDF, PPTX
4,197 views
20121124 ロボコニストカンファ・リトライ 外骨格スーツの創り方01
2012年11月に両国で開催されたロボコニストカンファ・リトライの発表資料.リンク機構の解説が主.スケルトニクス製作委員会初となる技術資料の公開.
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 22
2
/ 22
3
/ 22
4
/ 22
5
/ 22
Most read
6
/ 22
7
/ 22
8
/ 22
9
/ 22
Most read
10
/ 22
Most read
11
/ 22
12
/ 22
13
/ 22
14
/ 22
15
/ 22
16
/ 22
17
/ 22
18
/ 22
19
/ 22
20
/ 22
21
/ 22
22
/ 22
More Related Content
PDF
20120428 ニコニコ学会β スケルトニクス製作委員会
by
スケルトニクス プロジェクト
PPTX
2018.07.17 福山ボバース研究会資料
by
murakami yusuke
PPTX
Locomotion
by
murakami yusuke
PPTX
学会発表
by
ponderaion
PDF
バレーボールのオーバーハンドパスにおける手指の筋腱複合体の弾性特性に基づく コーチングへの一考察
by
Fukuoka Institute of Technology
PPT
正しい姿勢が腰痛を防ぐ/保持正確姿勢防範腰痛
by
xilin peng
PPT
整形外科プライマリーケア スポーツ外傷
by
gamitake ikuiku
PPTX
Knee joint
by
Frencess Tadius
20120428 ニコニコ学会β スケルトニクス製作委員会
by
スケルトニクス プロジェクト
2018.07.17 福山ボバース研究会資料
by
murakami yusuke
Locomotion
by
murakami yusuke
学会発表
by
ponderaion
バレーボールのオーバーハンドパスにおける手指の筋腱複合体の弾性特性に基づく コーチングへの一考察
by
Fukuoka Institute of Technology
正しい姿勢が腰痛を防ぐ/保持正確姿勢防範腰痛
by
xilin peng
整形外科プライマリーケア スポーツ外傷
by
gamitake ikuiku
Knee joint
by
Frencess Tadius
Viewers also liked
PPT
出張報告2013 cspt肩肘
by
Noriyuki Kosaka
PPT
Cor 2
by
fikri asyura
PPT
出張報告2012横浜リアライン
by
Noriyuki Kosaka
PDF
疾患を意識した関節所見の取り方
by
帝京大学ちば総合医療センター
PPT
Surgery 6th year, Tutorial (Dr. Ali A. Nabi)
by
College of Medicine, Sulaymaniyah
PPTX
Knee Joint
by
Endrit Luta
PPT
Knee Joint anatomy and Disorders
by
Sumudu Himesha Meawela
出張報告2013 cspt肩肘
by
Noriyuki Kosaka
Cor 2
by
fikri asyura
出張報告2012横浜リアライン
by
Noriyuki Kosaka
疾患を意識した関節所見の取り方
by
帝京大学ちば総合医療センター
Surgery 6th year, Tutorial (Dr. Ali A. Nabi)
by
College of Medicine, Sulaymaniyah
Knee Joint
by
Endrit Luta
Knee Joint anatomy and Disorders
by
Sumudu Himesha Meawela
20121124 ロボコニストカンファ・リトライ 外骨格スーツの創り方01
1.
外骨格スーツのつくりかた ~skeletonicsはこうやった~
Team skeletonics:阿嘉倫大 Twitter ID:hyper_red_time
2.
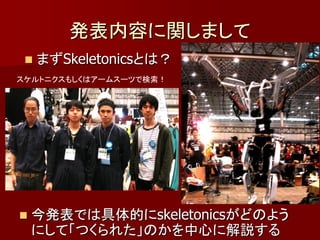
発表内容に関しまして
まずSkeletonicsとは? スケルトニクスもしくはアームスーツで検索! 今発表では具体的にskeletonicsがどのよう にして「つくられた」のかを中心に解説する
3.
目次 チーム紹介(自己紹介) 着想
マシンの系譜 Skeletonicsのつくり方 – 仕様 – 製作とそのポイント 構成の基本概念 上半身 下半身 EXONNECS チームの今、メンバーの今
4.
チーム紹介
☆2008年当時 2004 ・沖縄高専Aチーム 沖縄高専開校 高専ロボコン全国優勝 2005 「」 ・白久 :班長 2006 ・玉城 :部長、多足担当 「」 白久 玉城 阿嘉 ・阿嘉 :二足担当 2007 ・中野 :新一年生 「」 2008 高専ロボコン 「生命大進化」 2009 中野 2010 2011 動画投稿 SKELETONICS 2012 2008年のリンク機構を扱った EXONNECS発足 経験が後のskeletonicsに大 2013 EXONNECS きく生かされることになる
5.
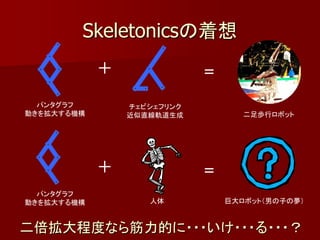
Skeletonicsの着想
+ = パンタグラフ チェビシェフリンク 動きを拡大する機構 近似直線軌道生成 二足歩行ロボット + = パンタグラフ 動きを拡大する機構 人体 巨大ロボット(男の子の夢) 二倍拡大程度なら筋力的に・・・いけ・・・る・・・?
6.
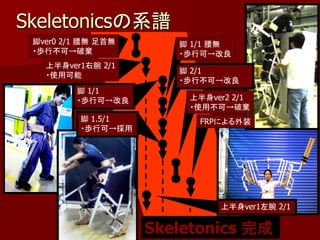
Skeletonicsの系譜 脚ver0 2/1
腰無 足首無 脚 1/1 腰無 ・歩行不可→破棄 ・歩行可→改良 上半身ver1右腕 2/1 脚 2/1 ・使用可能 ・歩行不可→改良 脚 1/1 ・歩行可→改良 上半身ver2 2/1 ・使用不可→破棄 脚 1.5/1 FRPによる外装 ・歩行可→採用 上半身ver1左腕 2/1 Skeletonics 完成
7.
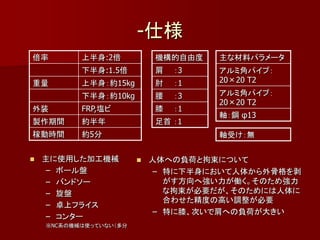
-仕様 倍率
上半身:2倍 機構的自由度 主な材料パラメータ 下半身:1.5倍 肩 :3 アルミ角パイプ: 重量 上半身:約15kg 肘 :1 20×20 T2 下半身:約10kg 腰 :3 アルミ角パイプ: 20×20 T2 外装 FRP,塩ビ 膝 :1 軸:鋼 φ13 製作期間 約半年 足首 :1 稼動時間 約5分 軸受け:無 主に使用した加工機械 人体への負荷と拘束について – ボール盤 – 特に下半身において人体から外骨格を剥 – バンドソー がす方向へ強い力が働く。そのため強力 – 旋盤 な拘束が必要だが、そのためには人体に 合わせた精度の高い調整が必要 – 卓上フライス – 特に膝、次いで肩への負荷が大きい – コンター ※NC系の機械は使っていない(多分
8.
-製作とそのポイント( Skeletonicsのつくり方)
構成の基本概念 上半身 –肩 –肘 下半身 –腰 –膝 – 足首
9.
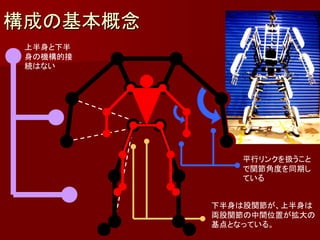
構成の基本概念 上半身と下半 身の機構的接
続はない 平行リンクを扱うこと で関節角度を同期し ている 下半身は股関節が、上半身は 両股関節の中間位置が拡大の 基点となっている。
10.
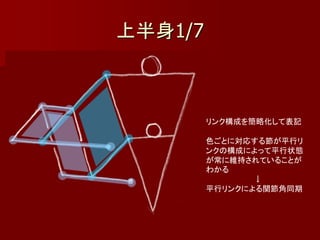
上半身1/7
リンク構成を簡略化して表記 色ごとに対応する節が平行リ ンクの構成によって平行状態 が常に維持されていることが わかる ↓ 平行リンクによる関節角同期
11.
上半身2/7
12.
上半身3/7
13.
上半身4/7
14.
上半身5/7
15.
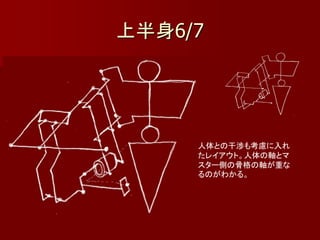
上半身6/7
人体との干渉も考慮に入れ たレイアウト。人体の軸とマ スター側の骨格の軸が重な るのがわかる。
16.
上半身7/7
17.
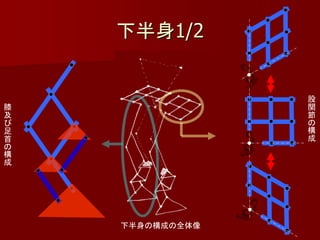
下半身1/2
股 膝 関 及 節 び の 足 構 首 成 の 構 成 下半身の構成の全体像
18.
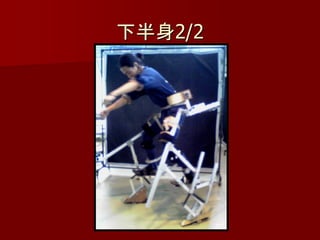
下半身2/2
19.
全体像
20.
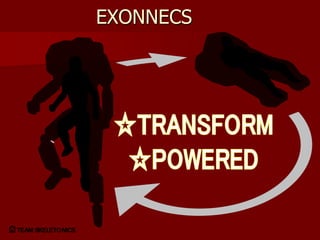
EXONNECS EXONNECS
2 0 12/ 1~20 1 3 5/ TEAM SKELETONICS
21.
チームの今、メンバーの今
あ か ともひろ しろく たつる たましろ こ う き 阿嘉 倫大 (23) 白久 レイエス樹 (23) 玉城 光輝 (23) 担当:ビークルモード 担当:全体構想,パワードシステム 実は 上半身はver3が存在する。 下半身は ver2が存在する。 な か の けいじゅ EXONNECS 中野 桂樹 (19) 準備実験及びプロトタイプの製作に着手中 担当:インターフェース
22.
発表は以上です ご清聴ありがとうございました
Download