Motion artifact detection in respiratory signals based on Teager energy opera...
Poster_Sarthak_SJ
1. Improving Long Term Myoelectric Decoding, Using an Adaptive
Classifier with Label Correction
SarthakJain1, Girish Singhal1, Ryan J. Smith2, RahulKaliki3and NitishThakor2
1Departement of Electrical Engineering IIT Gandhinagar, Ahmedabad, India
2Depratment of Biomedical Engineering, The Johns Hopkins University, Baltimore,USA
3Infinite Biomedical Technologies LLC, Baltimore, Maryland, USA
Introduction
This study presents a novel
adaptive myoelectric decoding
algorithm for control of upper
limb prosthesis. Myoelectric
decoding algorithms are
inherently subject to decay in
decoding accuracy over time,
which is caused by the changes
occurring in the muscle signals
as well as other factors.
The proposed algorithm relies
on an unsupervised and on
demand update of the training
set, and has been designed to
adapt to both the slow and fast
changes that occur in
myoelectric signals. An update in
the training data is used to
counter the slow changes,
whereas an update with label
correction addresses the fast
changes in the signals to tackle
concept drift.
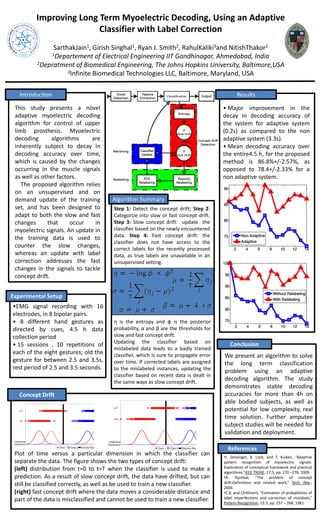
Results
• Major improvement in the
decay in decoding accuracy of
the system for adaptive system
(0.2s) as compared to the non
adaptive system (3.3s).
• Mean decoding accuracy over
the entire4.5 h, for the proposed
method is 86.8%+/-2.57%, as
opposed to 78.4+/-2.33% for a
non adaptive system.
Conclusion
References
We present an algorithm to solve
the long term classification
problem using an adaptive
decoding algorithm. The study
demonstrates stable decoding
accuracies for more than 4h on
able bodied subjects, as well as
potential for low complexity, real
time solution. Further amputee
subject studies will be needed for
validation and deployment.
Step 1: Detect the concept drift; Step 2:
Categorize into slow or fast concept drift.
Step 3: Slow concept drift: update the
classifier based on the newly encountered
data. Step 4: Fast concept drift: the
classifier does not have access to the
correct labels for the recently processed
data, as true labels are unavailable in an
unsupervised setting.
Concept Drift
Experimental Setup
•EMG signal recording with 16
electrodes, in 8 bipolar pairs.
• 8 different hand gestures as
directed by cues, 4.5 h data
collection period
• 15 sessions , 10 repetitions of
each of the eight gestures; old the
gesture for between 2.5 and 3.5s,
rest period of 2.5 and 3.5 seconds.
η is the entropy and ɸ is the posterior
probability, α and β are the thresholds for
slow and fast concept drift.
Updating the classifier based on
mislabeled data leads to a badly trained
classifier, which is sure to propagate error
over time. If corrected labels are assigned
to the mislabeled instances, updating the
classifier based on recent data is dealt in
the same ways as slow concept drift.
•J. Sensinger, B. Lock, and T. Kuiken, “Adaptive
pattern recognition of myoelectric signals:
Exploration of conceptual framework and practical
algorithms,”IEEE TNSRE, 17:3, pp. 270 –278, 2009.
•A. Tsymbal, “The problem of concept
drift:Definitions and related work,” Tech. Rep.,
2004.
•C.B. and Chittineni, “Estimation of probabilities of
label imperfections and correction of mislabels,”
Pattern Recognition, 13:3, pp. 257 – 268, 1981.
Plot of time versus a particular dimension in which the classifier can
separate the data. The figure shows the two types of concept drift:
(left) distribution from t=0 to t=T when the classifier is used to make a
prediction. As a result of slow concept drift, the data have drifted, but can
still be classified correctly, as well as be used to train a new classifier.
(right) fast concept drift where the data moves a considerable distance and
part of the data is misclassified and cannot be used to train a new classifier.
Algorithm Summary