Trình bày cơ chế nhập / xuất của hệ thống vào ra dữ liệu
C1
1. Tài liệu Lập trình hệ thống Chương 1
Chương 1
KIẾN TRÚC VÀ HOẠT ĐỘNG CỦA HỆ VI XỬ LÝ /
MÁY TÍNH
1. Cấu trúc luận lý
Máy tính số (Digital computer) là máy giải quyết các vấn đề bằng cách thực hiện
các chỉ thị do con người cung cấp. Chuỗi các chỉ thị này gọi là chương trình (program).
Các mạch điện tử trong một máy tính số sẽ thực hiện một số giới hạn các chỉ thị đơn giản
cho trước. Tập hợp các chỉ thị này gọi là tập lệnh của máy tính. Tất cả các chương trình
muốn thực thi đều phải được biến đổi sang tập lệnh trước khi được thi hành. Các lệnh cơ
bản là:
- Cộng 2 số.
- So sánh với 0.
- Di chuyển dữ liệu.
Tập lệnh của máy tính tạo thành một ngôn ngữ giúp con người có thể tác động lên
máy tính, ngôn ngữ này gọi là ngôn ngữ máy (machine language). Tuy nhiên, hầu hết các
ngôn ngữ máy đều đơn giản nên để thực hiện một yêu cầu nào đó, người thiết kế phải
thực hiện một công việc phức tạp. Đó là chuyển các yêu cầu này thành các chỉ thị có chứa
trong tập lệnh của máy. Vấn đề này có thể giải quyết bằng cách thiết kế một tập lệnh mới
thích hợp cho con người hơn tập lệnh đã cài đặt sẵn trong máy (built-in). Ngôn ngữ máy
sẽ được gọi là ngôn ngữ cấp 1 (L1) và ngôn ngữ vừa được hình thành gọi là ngôn ngữ cấp
2 (L2).
Tuy nhiên, trong thực tế, để có thể thực hiện được, các ngôn ngữ L1 và L2 không
được khác nhau nhiều. Như vậy, ngôn ngữ L2 cũng không thật sự giúp ích nhiều cho
người thiết kế. Do đó, một tập lệnh kế tiếp được hình thành sẽ hướng về con người nhiều
hơn là máy tính, tập lệnh này sẽ tạo thành một ngôn ngữ và ta gọi là ngôn ngữ L3. Ta có
thể viết các chương trình trong L3 như là đã tồn tại máy tính sử dụng ngôn ngữ L3 (máy
ảo L3). Các chương trình này sẽ được dịch sang ngôn ngữ L2 và được thực thi bằng một
chương trình dịch L2.
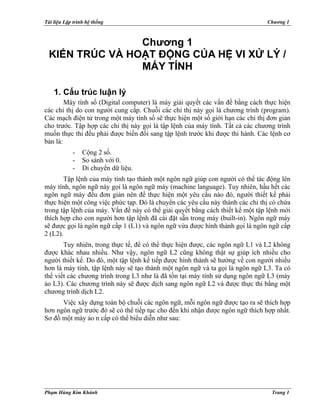
Việc xây dựng toàn bộ chuỗi các ngôn ngữ, mỗi ngôn ngữ được tạo ra sẽ thích hợp
hơn ngôn ngữ trước đó sẽ có thể tiếp tục cho đến khi nhận được ngôn ngữ thích hợp nhất.
Sơ đồ một máy ảo n cấp có thể biểu diễn như sau:
Phạm Hùng Kim Khánh Trang 1
2. Tài liệu Lập trình hệ thống Chương 1
Cấp n
Cấp 3
Cấp 2
Cấp 1
Máy ảo Mn dùng ngôn
ngữ máy Ln
Chương trình trong Ln được dịch thành
ngôn ngữ của máy cấp thấp hơn
Máy ảo M3 dùng ngôn
ngữ máy L3
Chương trình trong L3 được dịch thành
ngôn ngữ L2 hay L1
Máy ảo M2 dùng ngôn
ngữ máy L2
Chương trình trong L2 được dịch thành
ngôn ngữ máy L1
Máy tính số M1 dùng
ngôn ngữ máy L1
Chương trình trong L1 được thực thi trực
tiếp bằng các mạch điện tử
Hình 1.1. Máy ảo n cấp
Một máy tính số có n cấp có thể xem như có n-1 máy ảo khác nhau, mỗi máy ảo có
một ngôn ngữ máy riêng. Các chương trình viết trên các máy ảo này không thể thực thi
trực tiếp mà phải dịch thành các ngôn ngữ máy cấp thấp hơn. Chỉ có máy thật dùng ngôn
ngữ máy L1 mới có thể thực thi trực tiếp bằng các mạch điện tử. Một lập trình viên sử
dụng máy ảo cấp n không cần biết tất cả các trình dịch này. Chương trình trong máy ảo
cấp n sẽ được thực thi bằng cách dịch thành ngôn ngữ máy cấp thấp hơn và ngôn ngữ máy
này sẽ được dịch thành ngôn ngữ máy thấp hơn nữa hay dịch trực tiếp thành ngôn ngữ
máy L1 và thực thi trực tiếp trên các mạch điện tử.
Phạm Hùng Kim Khánh Trang 2
3. Tài liệu Lập trình hệ thống Chương 1
Về cơ bản, máy tính gồm có 6 cấp:
Cấp 5 Cấp ngôn ngữ hướng vấn đề
Dịch (chương trình dịch)
Cấp 4 Cấp ngôn ngữ hợp dịch
Dịch (hợp dịch)
Cấp 3 Cấp hệ điều hành
Dịch 1 phần (hệ điều hành)
Cấp 2 Cấp máy quy ước
Thông dịch (vi chương trình)
Cấp 1 Cấp vi lập trình
Vi chương trình (phần cứng)
Cấp 0 Cấp logic số
Hình 1.2 – Các cấp trên máy tính số
Cấp 0 chính là phần cứng của máy tính. Các mạch điện tử của cấp này sẽ thực thi
các chương trình ngôn ngữ máy của cấp 1. Trong cấp logic số, đối tượng quan tâm là các
cổng logic. Các cổng này được xây dựng từ một nhóm các transistor.
Cấp 1 là cấp ngôn ngữ máy thật sự. Cấp này có một chương trình gọi là vi chương
trình (microprogram), vi chương trình có nhiệm vụ thông dịch các chỉ thị của cấp 2. Hầu
hết các lệnh trong cấp này là di chuyển dữ liệu từ phần này đến phần khác của máy hay
thực hiện việc một số kiểm tra đơn giản.
Mỗi máy cấp 1 có một hay nhiều vi chương trình chạy trên chúng. Mỗi vi chương
trình xác định một ngôn ngữ cấp 2. Các máy cấp 2 đều có nhiều điểm chung ngay cả các
máy cấp 2 của các hãng sản xuất khác nhau. Các lệnh trên máy cấp 2 được thực thi bằng
cách thông dịch bởi vi chương trình mà không phải thực thi trực tiếp bằng phần cứng.
Cấp thứ 3 thường là cấp hỗn hợp. Hầu hết các lệnh trong ngôn ngữ của cấp máy
này cũng có trong ngôn ngữ cấp 2 và đổng thời có thêm một tập lệnh mới, một tổ chức bộ
Phạm Hùng Kim Khánh Trang 3
4. Tài liệu Lập trình hệ thống Chương 1
nhớ khác và khả năng chạy 2 hay nhiều chương trình song song. Các lệnh mới thêm vào
sẽ được thực thi bằng một trình thông dịch chạy trên cấp 2, gọi là hệ điều hành. Nhiều
lệnh cấp 3 được thực thi trực tiếp do vi chương trình và một số lệnh khác được thông dịch
bằng hệ điều hành (do đó, cấp này là cấp hỗn hợp).
Cấp 4 thật sự là dạng tượng trưng cho một trong các ngôn ngữ. Cấp này cung cấp
một phương pháp viết chương trình cho các cấp 1, 2, 3 dễ dàng hơn. Các chương trình
viết bằng hợp ngữ được dịch sang các ngôn ngữ của cấp 1, 2, 3 và sau đó được thông dịch
bằng các máy ảo hay thực tương ứng.
Cấp 5 bao gồm các ngôn ngữ được thiết kế cho người lập trình nhằm giải quyết
một vấn đề cụ thể. Các ngôn ngữ này được gọi là cấp cao. Một số ngôn ngữ cấp cao như
Basic, C, Cobol, Fortran, Lisp, Prolog, Pascal và các ngôn ngữ lập trình hướng đối tượng
như C++, J++, … Các chương trình viết bằng các ngôn ngữ này thường được dịch sang
cấp 3 hay 4 bằng các trình biên dịch (compiler).
2. Giao tiếp ngoại vi
Ta phân biệt tất cả 3 phương pháp xuất / nhập dữ liệu:
- Nhập / xuất bằng cách hỏi trạng thái của thiết bị ngoại vi (polling)
- Nhập / xuất bằng ngắt (interrupt).
- Nhập / xuất bằng cách truy xuất trực tiếp vào bộ nhớ dùng các phần cứng phụ
trợ (DMA).
2.1. Nhập / xuất dữ liệu bằng cách hỏi vòng (polling)
Ta biết rằng vấn đề điều khiển nhập / xuất dữ liệu sẽ rất đơn giản trong trường hợp
thiết bị ngoại vi lúc nào cũng có thể làm việc với μP. Ta có thể ví dụ như bộ hiển thị Led
7 đoạn lúc nào cũng sẵn sàng hiển thị dữ liệu khi mà μP gởi dữ liệu ra. Tuy nhiên, trong
thực tế, không phải lúc nào μP cũng làm việc với các thiết bị ngoại vi có tính năng như
trên. Ví dụ như khi làm việc với một máy in, μP yêu cầu in nhưng máy in không sẵn sàng
(giả sử như hết giấy, kẹt giấy, …). Khi đó, μP phải kiểm tra xem một thiết bị mà nó cần
giao tiếp có sẵn sàng hay không nếu thiết bị sẵn sàng thì mới thực hiện trao đổi dữ liệu.
Để kiểm tra các thiết bị ngoại vi, μP phải sử dụng các tín hiệu bắt tay (handshake) xác
định tuần tự từng thiết bị, xem thiết bị nào có yêu cầu trao đổi dữ liệu. Các tín hiệu này
lấy từ các mạch giao tiếp do người thiết kế tạo ra.
Giả sử hệ thống có 2 thiết bị ngoại vi, nếu thiết bị 1 có dữ liệu cần truyền đến μP
thì nó sẽ gởi 1 xung để chốt dữ liệu đồng thời tạo tín hiệu sẵn sàng cho thiết bị. Khi μP
kiểm tra tín hiệu sẵn sàng của thiết bị 1 thì nó sẽ đọc dữ liệu vào từ mạch chốt và xoá tín
hiệu sẵn sàng.
Trong trường hợp μP muốn gởi dữ liệu ra thiết bị 2, nó sẽ đọc tín hiệu sẵn sàng của
thiết bị 2, nếu thiết bị 2 có thể nhận dữ liệu thì μP sẽ gởi dữ liệu ra mạch chốt và thiết bị 2
sẽ đọc dữ liệu vào.
Phạm Hùng Kim Khánh Trang 4
5. Tài liệu Lập trình hệ thống Chương 1
2.2. Ngắt và xử lý ngắt
Trong cách thức thực hiện trao đổi dữ liệu bằng cách hỏi vòng như trên, trước khi
tiến hành thực hiện thì μP phải kiểm tra trạng thái sẵn sàng của thiết bị ngoại vi. Tuy
nhiên trong thực tế ta cần phải tận dụng khả năng của μP để làm các công việc khác mà
không phải tốn thời gian kiểm tra thiết bị, chỉ khi nào có yêu cầu trao đổi dữ liệu thì mới
tạm dừng công việc hiện tại. Cách làm việc như vậy gọi là ngắt μP, khi có một ngắt xảy ra
thì ta phải thực hiện gọi các chương trình phục vụ ngắt tại các địa chỉ xác định của μP.
Các tín hiệu ngắt từ thiết bị ngoại vi đưa vào μP thông qua các chân NMI hay INTR.
2.2.1. Các loại ngắt
™ Ngắt cứng: là các yêu cầu ngắt từ các chân NMI hay INTR.
Ngắt cứng NMI là ngắt không che được còn ngắt cứng INTR có thể che được. Các
lệnh CLI (Clear Interrupt) và STI (Set Interrupt) chỉ ảnh hưởng đến việc μP có chấp nhận
yêu cầu ngắt tại chân INTR hay không. Yêu cầu ngắt tại chân INTR có thể có các kiểu
ngắt từ 00h ÷ FFh. Kiểu ngắt này sẽ được đưa vào bus dữ liệu để μP xác định kiểu ngắt
(dùng cho các thiết bị ngoại vi khác nhau).
74LS245
1
19
2 3 4 5 6 7 8 9
11
12
13
14
15
16
17
18
DIR
G
A8
A7
A6
A5
A4
A3
A2
A1
B8
B7
B6
B5
B4
B3
B2
B1
INT7
INT5
INT6
INT4
INT3
INT2
INT1
VCC
INT0
1234
56
11
12
8
40
39
38
37
36
35
34
33
32
VCC
GND
AD14
AD15
AD13
A16/S3
AD12
A17/S4
AD11
A18/S5
AD10
A19/S6
AD9
BHE/S7
AD8
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0
NMI
INTR
CLK
GND RESET
MN/MX
RD
10
11
HOLD (RQ/GT0)
12
HLDA (RQ/GT1)
13
WR (LOCK)
14
IO/M (S2)
15
DT/R (S1)
16
DEN (S0)
17
ALE (QS0)
18
INTA (QS1)
19
20 21
8086
123456789
31
30
29
28
27
26
25
24
23
22
TEST
READY
Hình 1.3 – Kết nối ngắt đơn giản
™ Ngắt mềm: là các ngắt thực hiện bằng phần mềm tác động do người sử dụng.
2.2.2. Đáp ứng của μP khi có yêu cầu ngắt
Khi có yêu cầu ngắt đến μP và nếu được phép ngắt, μP sẽ thực hiện các công việc
sau:
- [SP] ← SP – 2, [SP] ← FR (Flag Register): cất thanh ghi cờ vào stack.
- IF ← 0, TF ← 0: không cho thực hiện các ngắt khác.
- SP ← SP – 2, [SP] ← CS: cất địa chỉ đoạn mã vào stack.
- SP ← SP – 2, [SP] ← IP: cất địa chỉ trở về sau khi phục vụ ngắt
Phạm Hùng Kim Khánh Trang 5
6. Tài liệu Lập trình hệ thống Chương 1
- IP ← [Số_hiệu_ngắt*4], CS ← [Số_hiệu_ngắt*4 + 2]: lấy lệnh tại địa chỉ phục
vụ ngắt tương ứng
- Sau khi kết thúc chương trình con phục vụ ngắt (khi gặp lệnh IRET):
+ IP ← [SP], SP ← SP + 2
+ CS ← [SP], SP ← SP + 2: lấy lại địa chỉ trước khi gọi chương trình phục vụ
ngắt
+ FR ← [SP], SP ← SP + 2: lấy lại giá trị thanh ghi cờ
2.2.3. Xử lý ưu tiên ngắt
Như ta đã biết ở trên, khi μP đang thực hiện lệnh, nếu có ngắt xảy ra thì μP sẽ tạm
ngừng chương trình và thực thi chương trình con phục vụ ngắt. Trong thực tế sẽ có trường
hợp có nhiều yêu cầu ngắt khác nhau cùng một lúc, khi đó μP sẽ phục vụ cho ngắt theo
thứ tự ưu tiên với nguyên tắc là ngắt nào có mức ưu tiên cao nhất thì sẽ phục vụ cho ngắt
đó trước.
Các mức ưu tiên của các ngắt (từ mức thấp nhất đến mức cao nhất):
- Ngắt thực hiện chạy từng lệnh (INT 1)
- Ngắt che được INTR
- Ngắt không che được NMI
- Ngắt nội bộ (INT 0: xảy ra do phép chia số 0, ngắt mềm)
2.3. Nhập / xuất dữ liệu bằng DMA (Direct Memory Access)
Trong các phương thức trao đổi dữ liệu như hai phần trên đã trình bày thì việc trao
đổi dữ liệu giữa thiết bị ngoại vi và hệ thống thường theo trình tự sau: từ ngoại vi đến vi
xử lý rồi đi vào bộ nhớ hay từ bộ nhớ đến vi xử lý rồi ghi ra ngoại vi. Trong thực tế sẽ
có trường hợp ta cần thực hiện trao đổi dữ liệu ngay giữa ngoại vi và bộ nhớ. Khi đó
người ta đưa ra cơ chế truy xuất bộ nhớ trực tiếp (DMA). Để thực hiện được vấn đề này,
các hệ vi xử lý thông thường dùng thêm các mạch chuyên dụng để điều khiển quá trình
truy xuất bộ nhớ trực tiếp (DMAC – Direct Memory Access Controller). Có tất cả 3 cơ
chế hoạt động:
¾ Tận dụng thời gian CPU không dùng bus:
Ta phải dùng thêm mạch phát hiện các chu kỳ xử lý nội của CPU và tận dụng các
chu kỳ này để thực hiện trao đổi dữ liệu.
¾ Treo CPU để trao đổi từng byte:
CPU không bị treo trong khoảng thời gian dài mà chỉ bị treo trong thời gian ngắn
đủ để trao đổi 1 byte dữ liệu giữa bộ nhớ và ngoại vi. Do đó, công việc của CPU không bị
gián đoạn mà chỉ bị chậm đi.
¾ Treo CPU một khoảng thời gian để trao đổi một khối dữ liệu:
Trong cơ chế này, CPU bị treo trong suốt quá trình trao đổi dữ liệu.
- CPU ghi từ lệnh và từ chế độ làm việc vào DMAC.
- Khi thiết bị ngoại vi có yêu cầu trao đổi dữ liệu, nó gởi tín hiệu DRQ = 1
(DMA Request) đến DMAC.
Phạm Hùng Kim Khánh Trang 6
7. Tài liệu Lập trình hệ thống Chương 1
- DMAC gởi tín hiệu HRQ (Hold Request) đến chân HOLD của CPU để yêu cầu
treo CPU. Tín hiệu này sẽ giữ ở mức cao cho đến hết quá trình trao đổi dữ liệu.
- Sau khi nhận yêu cầu treo, CPU sẽ thực hiện hết chu kỳ bus của m?nh rồi treo
các bus và gởi tín hiệu HLDA (Hold Acknowledge) để báo cho DMAC biết có
thể sử dụng các bus.
- DMAC chuyển dữ liệu từ bộ nhớ đến ngoại vi bằng cách: đưa địa chỉ byte đầu
tiên ra bus địa chỉ và đưa tín hiệu MEMR để đọc 1 byte từ bộ nhớ, kế tiếp
DMAC đưa tín hiệu IOW để ghi dữ liệu ra ngoại vi. Sau đó, DMAC giảm số
byte cần truyền, cập nhật địa chỉ bộ nhớ và lặp lại quá trình cho đến khi hết
byte cần truyền.
DMAC
Address bus
Data bus
HRQ
HACK
I/O
DRQ
DACK
DRQ
DACK
Control bus
Hình 1.4 – Giao tiếp DMAC với hệ vi xử lý
μP
HOLD
HLDA
Memory
Hai tín hiệu dùng để yêu cầu treo và chấp nhận yêu cầu treo CPU dùng cho cơ chế
DMA là HOLD và HLDA có thể mô tả như sau:
T4 hay T1
Hình 1.5 – Tín hiệu HOLD và HLDA
CLK
HOLD
HLDA
Phạm Hùng Kim Khánh Trang 7
8. Tài liệu Lập trình hệ thống Chương 1
3. Bus
CPU
ALU
Bus nội (on-chip bus)
Đồng xử lý
Bus hệ thống (system bus)
Memory
board
I/O
board
Bus cục bộ
(local bus)
Hình 1.6 - Các bus trong một hệ thống máy tính
Registers
Bus là đường truyền tín hiệu điện nối các thiết bị khác nhau trong một hệ thống
máy tính. Bus thường có từ 50 đến 100 dây dẫn được gắn trên mainboard, trên các dây
này có các đầu nối đưa ra, các đầu này được sắp xếp và cách nhau những khoảng quy
định để có thể cắm vào đó những I/O board hay board bộ nhớ (bus hệ thống – system
bus).
Cũng có những bus dùng cho mục đích chuyên biệt, thí dụ nối 1 vi xử lý với 1 hay
nhiều vi xử lý khác hoặc nối với bộ nhớ cục bộ (local bus).
Trong vi xử lý cũng có một số bus để nối các thành phần bên trong của bộ vi xử lý
với nhau. Người thiết kế chip vi xử lý có thể tuỳ ý lựa chọn loại bus bên trong nó, còn với
các bus liên hệ bên ngoài cần phải xác định rõ các quy tắc làm việc cũng như các đặc
điểm kỹ thuật về điện và cơ khí của bus để người thiết kế mainboard có thể ghép nối chip
vi xử lý với các thiết bị khác. Nói cách khác, các bus này phải tuân theo 1 chuẩn nào đó.
Tập các quy tắc của chuẩn còn được gọi là giao thức bus (bus protocol)
Thường có nhiều thiết bị nối với bus, một số thiết bị là tích cực (active) có thể đòi
hỏi truyền thông trên bus, trong khi đó có các thiết bị thụ động chờ yêu cầu từ các thiết bị
khác. Các thiết bị tích cực được gọi là chủ (master) còn thiết bị thụ động là tớ (slave).
Ví dụ: Khi CPU ra lệnh cho bộ điều khiển đĩa đọc/ghi một khối dữ liệu thì CPU là
master còn bộ điều khiển đĩa là slave. Tuy nhiên, bộ điều khiển đĩa ra lệnh cho bộ nhớ
nhận dữ liệu thì nó lại giữ vai trò master.
Phạm Hùng Kim Khánh Trang 8
9. Tài liệu Lập trình hệ thống Chương 1
3.1. Bus Driver và Bus Receiver
Tín hiệu điện trong máy tính phát ra thường không đủ để điều khiển bus, nhất là
khi bus khá dài và có nhiều thiết bị nối với nó. Chính vì thế mà hầu hết các bus master
được nối với bus thông qua 1 chip gọi là bus driver, về cơ bản nó là một bộ khuếch đại tín
hiệu số. Tương tự như vậy, hầu hết các slave được nối với bus thông qua bus receiver.
Đối với các thiết bị khi thì đóng vai trò master, khi thì đóng vai trò slave, người ta sử
dụng 1 chip kết hợp gọi là transceiver. Các chip này đóng vai trò ghép nối và là các thiết
bị 3 trạng thái, cho phép nó có thể ở trạng thái thứ 3 – hở mạch (thả nổi).
Giống như vi xử lý, bus có các đường địa chỉ, đường số liệu và đường điều khiển.
Tuy nhiên, không nhất thiết có ánh xạ 1 – 1 giữa các tín hiệu ở các chân ra của vi xử lý và
các đường dây của bus. Thí dụ: một số chíp vi xử lý có 3 chân ra, truyền ra các tín hiệu
báo chíp vi xử lý đang thực hiện các thao tác MEMR, MEMW , IOR , IOW hay thao
tác khác. Một bus điển hình thường có 4 đường trên.
Các vấn đề quan trọng nhất liên quan đến thiết kế bus là: xung clock bus (sự phân
chia thời gian, hay còn gọi là bus blocking), cơ chế phân xử bus (bus arbitration), xử lý
ngắt và xử lý lỗi.
Các bus có thể được chia theo giao thức truyền thông thành hai loại riêng biệt là
bus đồng bộ và bus không đồng bộ phụ thuộc vào việc sử dụng clock bus.
3.2. Bus đồng bộ (Synchronous bus)
Mỗi chu kỳ bus bắt đầu bằng việc xuất địa chỉ bộ nhớ hoặc I/O port (chu kỳ xung
nhịp T1). Bus điều khiển có 4 tín hiệu tác động mức thấp làMEMR, MEMW, IOR và
IOW.
Các chuỗi sự kiện xảy ra trong một chu kỳ bus đọc bộ nhớ:
T1: μP xuất địa chỉ bộ nhớ 20 bit. Các đường dữ liệu không hoạt động và các
đường điều khiển bị cấm
T2: Đường điều khiển MEMR xuống mức thấp. Đơn vị bộ nhớ ghi nhận chu kỳ
bus này là quá trình đọc bộ nhớ và đặt byte hay word có địa chỉ đó lên data bus.
T3: μP đặt cấu hình để các đường data bus là nhập. Trạng thái này chủ yếu để bộ
nhớ có thời gian tìm kiếm byte hay word dữ liệu
T4: μP đợi dữ liệu trên data bus. Do đó, nó thực hiện chốt data bus và giải phóng
các đường điều khiển đọc bộ nhớ. Quá trình này sẽ kết thúc chu kỳ bus.
Phạm Hùng Kim Khánh Trang 9
10. Tài liệu Lập trình hệ thống Chương 1
T1 T2 T3 T4
Địa chỉ
Địa chỉ
Dữ liệu vào
Dữ liệu ra
Hình 1.7 – Định thì chu kỳ bus đồng bộ
Clk
Address
bus
IOR hay
MEMR
Data bus
Address
bus
IOW hay
MEMW
Data bus
Đọc bộ
nhớ hay
I/O
Ghi bộ
nhớ hay
I/O
Trong một chu kỳ bus, μP có thể thực hiện đọc I/O, ghi I/O, đọc bộ nhớ hay ghi bộ
nhớ. Các đường address bus và control bus dùng để xác định địa chỉ bộ nhớ hay I/O và
hướng truyền dữ liệu trên data bus.
Chú ý rằng μP điều khiển tất cả các quá trình trên nên bộ nhớ bắt buộc phải cung
cấp được dữ liệu vào lúc MEMR lên mức cao trong trạng thái T4. Nếu không, μP sẽ đọc
dữ liệu ngẫu nhiên không mong muốn trên data bus. Để giải quyết vấn đề này, ta có thể
dùng thêm các trạng thái chờ (wait state).
™ Truyền theo khối:
Ngoài các chu kỳ đọc/ghi, một số bus truyền dữ liệu đồng bộ còn hỗ trợ truyền dữ
liệu theo khối. Khi bắt đầu thao tác đọc khối, bus master báo cho slave biết số byte cần
được truyền đi, thí dụ truyền con số này đi trong chu kỳ T1, sau đó đáng lẽ truyền đi 1
byte, slave đưa ra trong mỗi chu kỳ 1 byte cho tới khi đủ số byte được thông báo. Như
vậy, khi đọc dữ liệu theo khối, n byte dữ liệu cần n+2 chu kỳ clock chứ không phải 3n
chu kỳ.
Một cách khác để cho truyền dữ liệu nhanh hơn là giảm chu kỳ. Tuy nhiên, giảm
chu kỳ bus dẫn đến khó khăn về mặt kỹ thuật, các tín hiệu truyền trên các đường khác
nhau không phải luôn có cùng tốc độ, dẫn đến hiệu ứng bus skew. Điều quan trọng là thời
Phạm Hùng Kim Khánh Trang 10
11. Tài liệu Lập trình hệ thống Chương 1
gian chu kỳ phải dài hơn so với skew để tránh việc những khoảng thời gian được số hoá
lại trở thành các đại lượng biến thiên liên tục.
3.3. Bus bất đồng bộ( Asynchronous bus)
Bus bất đồng bộ không sử dụng xung clock đồng bộ, chu kỳ của nó có thể kéo dài
tuỳ ý và có thể khác nhau đối với các cặp thiết bị khác nhau. Làm việc với các bus đồng
bộ dễ dàng hơn do nó được định thời một cách gián đoạn , tuy vậy chính đặc điểm này
cũng dẫn đên nhược điểm. Mọi công việc được tiến hành trong khoảng thời gian là bội số
của xung clock, nếu 1 thao tác nào đó của vi xử lý hay bộ nhớ hoàn thành trong 3.1 chu
kỳ thì nó cũng sẽ phải kéo dài trong 4 chu kỳ. Khi đã chọn chu kỳ bus và đã xây dựng bộ
nhớ, I/O card cho bus này thì khó có thể tận dụng những tiến bộ của công nghệ. Chẳng
hạn sau khi đã xây bus với sự định thời như trên, công nghệ mới đưa ra các vi xử lý và bộ
nhớ có thời gian chu kỳ là 100ns chứ không còn là 750ns như cũ, thì chúng vẫn chạy với
tốc độ thấp như các vi xử lý, bộ nhớ loại cũ, bởi vì giao thức bus đòi hỏi bộ nhớ phải đưa
được dữ liệu ra và ổn định trước thời điểm cạnh âm của T3. Nếu có nhiều thiết bị khác
nhau cùng nối với 1 bus, trong đó có thể có một số thiết bị hoạt động nhanh hơn hơn các
thiết bị khác thì cần phải đặt bus hoạt động phù hợp với thiết bị có tốc độ thấp nhất.
Bus bất đồng bộ ra đời nhằm khắc phục những nhược điểm của bus đồng bộ.
Trước hết master phát ra địa chỉ nhớ mà nó muốn truy cập, sau đó phát tín hiệu MEMR
tích cực để xác định cần truy xuất bộ nhớ và yêu cầu quá trình truy xuất là READ để xác
định chiều truyền dữ liệu. Tín hiệu MEMR được đưa ra sau tín hiệu địa chỉ một khoảng
thời gian phụ thuộc tốc độ hoạt động của master. Sau khi 2 tín hiệu này đã ổn định, master
sẽ phát ra tín hiệu MSYN (master synchrization) ở mức tích cực để báo cho slave biết
rằng các tín hiệu cần thiết đã sẵn sàng trên bus, slave có thể nhận lấy. Khi slave nhận
được tín hiệu này, nó sẽ thực hiện công việc với tốc độ nhanh nhất có thể được, đưa dữ
liệu của ô nhớ được yêu cầu lên bus dữ liệu. Khi hoàn thành slave sẽ phát tín hiệu SSYN
(slave synchronization) tích cực.
Hình 1.8 – Định thì chu kỳ bus bất đồng bộ
Address
MEMR
(Control)
MSYN
Data
SSYN
Phạm Hùng Kim Khánh Trang 11
12. Tài liệu Lập trình hệ thống Chương 1
Master nhận được tín hiệu SSYN tích cực thì xác định được dữ liệu của slave đã
sẵn sàng nên thực hiện việc chốt dữ liệu, sau đó đảo các đường địa chỉ cũng như các tín
hiệu MEMR và MSYN . Khi slave nhận được tín hiệu MSYN không tích cực, nó xác
định kết thúc chu kỳ và đảo tín hiệu SSYN làm bus trở lại trạng thái ban đầu, mọi tín hiệu
đều không tích cực, chờ bus master mới.
Trên giản đồ thời gian của bus bất đồng bộ, ta sử dụng mũi tên để thể hiện nguyên
nhân và kết quả. MSYN tích cực dẫn đến việc truyền dữ liệu ra bus dữ liệu và đồng thời
cũng dẫn đến việc slave phát ra tín hiệu SSYN tích cực, đến lượt mình tín hiệu SSYN lại
gây ra sự đảo mức của các đường địa chỉ, MEMR và MSYN . Cuối cùng sự đảo mức của
MSYN lại gây ra sự đảo mức tín hiệu SSYN và kết thúc chu kỳ. Tập các tín hiệu phối
hợp với nhau như vậy được gọi là bắt tay toàn phần (full handshake), chủ yếu gồm 4 tín
hiệu sau:
- MSYN tích cực.
- SSYN tích cực để đáp lại tín hiệu MSYN .
- MSYN được đảo để đáp lại tín hiệu SSYN (tích cực).
- SSYN được đảo để đáp lại tín hiệu MSYN không tích cực.
Ta có thể nhận thấy bắt tay toàn phần là độc lập thời gian, mỗi sự kiện được gây ra
bởi 1 sự kiện trước đó chứ không phải bởi xung clock. Nếu 1 cặp master-slave nào đó
hoạt động chậm thì cặp master-slave kế tiếp không hề bị ảnh hưởng.
Tuy ưu điểm của bus bất đồng bộ rất rõ ràng, nhưng trong thực tế phần lớn các bus
đang sử dụng là loại đồng bộ. Nguyên nhân là các hệ thống sử dụng bus đồng bộ dễ thiết
kế hơn. Vi xử lý chỉ cần chuyển các mức tín hiệu cần thiết sang trạng thái tích cực là bộ
nhớ đáp ứng ngay, không cần tín hiệu phản hồi. Chỉ cần các chọn phù hợp thì mọi hoạt
động đều trôi chảy, không cần phải bắt tay.
3.4. Xử lý ngắt
Ở trên, ta chỉ khảo sát các chu kỳ bus thông thường, trong đó master nhận hay gởi
thông tin từ / đến slave. Một ứng dụng quan trọng nữa của bus là dùng để xử lý ngắt. Khi
CPU ra lệnh cho thiết bị I/O làm một việc gì đó, nó thường chờ đợi tín hiệu ngắt do thiết
bị I/O phát ra khi hoàn thành công việc được CPU yêu cầu. Khi nhận được tín hiệu ngắt,
CPU sẽ đáp ứng ngay, có thể nhận dữ liệu do thiết bị I/O truyền về, hay gởi tiếp dữ liệu ra
thiết bị I/O, hay CPU sẽ sử dụng bus cho một thao tác khác…. Như vậy chính ngắt phát ra
tín hiệu yêu cầu sử dụng bus.
Vì có thể nhiều thiết bị ngoại vi cùng phát ra ngắt, cho nên cần có 1 cơ chế phân
xử giống như đối với các bus thông thường. Giải pháp thường dùng là gán các mức độ ưu
tiên cho các thiết bị và sử dụng 1 arbiter tập trung để trao quyền ưu tiên cho các thiết bị
quan trọng thường xuyên được sử dụng. Hiện trên thị trường có những chip điều khiển
ngắt được tiêu chuẩn hóa và được sử dụng rộng rãi là chip 8259A. Có thể nối 8 chip điều
khiển I/O tới các đầu IRx (Interrupt request) của 8259A. Khi có 1 thiết bị nào đó muốn
ngắt, nó đặt mức tích cực lên chân Irx, 8259A nhận được tín hiệu tích cực ở 1 hay một số
Phạm Hùng Kim Khánh Trang 12
13. Tài liệu Lập trình hệ thống Chương 1
đầu vào Irx thì sẽ đặt mức tích cực lên đầu dây INT. Tín hiệu INT sẽ truyền trực tiếp đến
chân Interrupt của CPU. Khi CPU có thể xử lý được ngắt, nó gởi lại 1 tín hiệu chấp nhận
ngắt cho 8259A. Lúc này, CPU chờ 8259A chỉ ra I/O nào yêu cầu ngắt, bằng cách gởi số
hiệu của I/O đó lên bus dữ liệu (D0-D7) để đi đến CPU. Sau đó, phần cứng CPU sẽ sử
dụng con số đó để tính chỉ số trong 1 bảng con trỏ -bảng vector ngắt (interrupt vector) để
tìm địa chỉ chương trình con, cho chạy chương trình này để phục vụ ngắt. Các chương
trình con này gọi là chương trình con xử lý ngắt.
4. Các chip hỗ trợ cho bộ xử lý trung tâm
4.1. Mạch tạo xung clock 8284
CSYNC VCC
18
PCLK
X1
AEN1
X2
RDY1
ASYNC
READY
EFI
RD2
F/C
AEN2
OSC
CLK
RES
GND RESET
8284
123456789
17
16
15
14
13
12
11
10
Hình 1.9 – Mạch tạo xung clock 8284
PCLK (Peripheral Clock): xung clock f = fX/6 (fX là tần số thạch anh) với chu kỳ
bổn phận 50%.
CSYNC (Clock Synchronisation): ngõ vào xung đồng bộ chung khi hệ thống có
các 8284 dùng dao động ngoài tại chân EFI. Khi dùng mạch dao động trong thì phải nối
GND.
AEN1 , AEN2 (Address Enable): cho phép chọn các chân tương ứng RDY1,
RDY2 báo hiệu trạng thái sẵn sàng của bộ nhớ hay thiết bị ngoại vi.
RDY1, RDY2 (Bus ready): kết hợp với AEN1, AEN2 tạo các chu kỳ đợi ở CPU
READY: nối đến chân READY của μP.
CLK (Clock): xung clock f = fX/3, nối với chân CLK của CPU.
RESET: nối với chân RESET của CPU, là tín hiệu khởi động lại toàn hệ thống.
RES (Reset Input): chân khởi động cho 8284, được nối với mạch RC để tự khởi
động khi bật nguồn.
OSC: ngõ ra xung clock có tần số fX.
F/C (Frequency / Crystal): chọn nguồn tín hiệu chuẩn cho 8284, nếu ở mức cao
thì chọn tần số xung clock bên ngoài, ngược lại thì dùng xung clock từ thạch anh.
EFI (External Frequency Input): xung clock từ bộ dao động ngoài.
Phạm Hùng Kim Khánh Trang 13
14. Tài liệu Lập trình hệ thống Chương 1
ASYNC : chọn chế độ làm việc cho tín hiệu RDY. Nếu ASYNC = 1, tín hiệu
RDY có ảnh hưởng đến tín hiệu READY cho đến khi có xung âm của xung clock. Ngược
lại thì RDY chỉ ảnh hưởng khi xuất hiện xung âm.
X1,X2: ngõ vào của thạch anh, dùng để tạo xung chuẩn cho hệ thống.
CSYNC
PCLK
AEN1
RDY1
READY
VCC
X1
X2
ASYNC
EFI
F/C
OSC
RES
RESET GND
8284
123456789
18
17
16
15
14
13
12
11
10
RD2
AEN2
CLK
+
Hình 1.10 – Mạch khởi động cho 8284
Vcc
4.2. Mạch định thời PIT – 8253 / 8254 (Programmable Interval Timer)
20 A0
OUT0
19
A1
10
OUT1
13
OUT2
17
D0
8
D1
7
D2
6
D3
5
D4 4
3
D5
D6
2
D7
1
G0
11
G1
14
G2
16
9
15 CLK0
CLK1
CLK2
18
RD
22
WR
23
CS
21
8253
Hình 1.11 – Sơ đồ chân của PIT 8253
Phạm Hùng Kim Khánh Trang 14
15. Tài liệu Lập trình hệ thống Chương 1
Bộ đếm
0
Bộ đếm
1
Bộ đếm
2
BUS NỘI
Hình 1.12 – Sơ đồ khối của PIT 8253
Đệm dữ
liệu
Điều
khiển
đọc/ghi
Thanh
ghi từ
điều
khiển
D7 ÷ D0
RD
WR
A1
A0
CS
OUT0
CLK0
GATE0
OUT1
CLK1
GATE1
OUT2
CLK2
GATE2
D7 ÷ D0: bus dữ liệu
CLK0 ÷ CLK2: ngõ vào xung clock cho các bộ đếm
OUT0 ÷ OUT2: ngõ ra bộ đếm
RD , WR: cho phép CPU đọc / ghi dữ liệu từ / đến các thanh ghi của 8253
A1, A0: giải mã chọn bộ đếm hay thanh ghi điều khiển, thường được nối với bus
địa chỉ của CPU
A1 A0 Chọn
0 0 Bộ đếm 0
0 1 Bộ đếm 1
1 0 Bộ đếm 2
1 1 Thanh ghi từ điều khiển
G0 ÷ G2 (Gate): cho phép hay cấm các bộ đếm hoạt động ( =1: cho phép, =0:
cấm).
PIT 8253 có tất cả 5 chế độ đếm tùy thuộc vào giá trị trong thanh ghi điều khiển.
Phạm Hùng Kim Khánh Trang 15
16. Tài liệu Lập trình hệ thống Chương 1
SC1
Chọn bộ đếm
00: bộ đếm 0
01: bộ đếm 1
10: bộ đếm 2
11: đọc CWR trong 8254
Quy định phương thức
đọc/ghi
00: chốt bộ đếm
01: đọc/ghi byte thấp
10: đọc/ghi byte cao
11: đọc/ghi byte thấp
trước, byte cao sau
SC0 RW1 RW0 M2 M1 M0 BCD
Định dạng đếm
0: đếm nhị phân
1: đếm BCD (0 ÷ 999)
Chế độ đếm
000: chế độ 0
001: chế độ 1
010: chế độ 2
011: chế độ 3
100: chế độ 4
101: chế độ 5
Hình 1.13 – Dạng từ điều khiển của 8253
PIT 8253 có 3 bộ đếm lùi 16 bit có thể lập trình và độc lập với nhau. Mỗi bộ đếm
có tín hiệu xung clock riêng (8254 tương tự như 8253 nhưng có thêm lệnh đọc thanh ghi
từ điều khiển CWR).
™ Các chế độ đếm:
Chế độ 0 (Interrupt on Terminal Count): tín hiệu ngõ ra ở mức thấp cho tới khi bộ
đếm tràn thì sẽ chuyển lên mức cao.
Chế độ 1 (Programmable Monoflop): tín hiệu ngõ ra chuyển xuống mức thấp tại
cạnh âm của xung clock đầu tiên và sẽ chuyển lên mức cao khi bộ đếm kết thúc.
Chế độ 2 (Rate Generator): tín hiệu ngõ ra xuống mức thấp trong chu kỳ đầu tiên
và sau đó chuyển lên mức cao trong các chu kỳ còn lại.
Chế độ 3 (Square-Wave Generator): tương tự như chế độ 2 nhưng xung ngõ ra là
sóng vuông khi giá trị đếm chẵn và sẽ thêm một chu kỳ ở mức cao khi giá trị đếm lẻ.
Chế độ 4 (Software-triggered Pulse): giống như chế độ 2 nhưng xung Gate không
khởi động quá trình đếm mà sẽ đếm ngay khi số đếm ban đầu được nạp. Ngõ ra ở mức
cao để đếm và xuống mức thấp trong chu kỳ xung đếm. Sau đó, ngõ ra sẽ trở lại mức cao.
Chế độ 5 (Hardware-triggered Pulse): giống như chế độ 2 nhưng xung Gate không
khởi động quá trình đếm mà được khởi động bằng cạnh dương của xung clock ngõ vào.
Ngõ ra ở mức cao và xuống mức thấp sau một chu kỳ clock khi quá trình đếm kết thúc.
Phạm Hùng Kim Khánh Trang 16
17. Tài liệu Lập trình hệ thống Chương 1
™ Ba chức năng của 8253 trong PC:
Cập nhật đồng hồ hệ thống: bộ đếm 0 của PIT phát tuần hoàn một ngắt cứng qua
IRQ0 của 8259 để CPU có thể thay đổi đồng hồ hệ thống. Bộ đếm hoạt động trong chế độ
2. Ngõ vào được cấp xung clock tần số 1.19318 MHz. G0 = 1 để bộ đếm luôn được phép
đếm. Giá trị ban đầu được nạp là 0 cho phép PIT phát ra xung chính xác với tần
số:1.19318/65536 = 18.206Hz. Cạnh dương của mỗi xung này sẽ tạo ra một ngắt cứng
trong 8259. Yêu cầu này sẽ dẫn tới ngắt 08h để cập nhật đồng hổ hệ thống 18.206 lần
trong 1 giây.
Làm tươi bộ nhớ: PIT nối với chip DMAC dùng làm tươi bộ nhớ DRAM. Bộ đếm
1 sẽ định kỳ kích hoạt kênh 0 của DMAC-8237A để tiến hành 1 chu trình đọc giả làm
tươi bộ nhớ. Bộ nhớ 1 hoạt động trong chế độ 3 phát sóng vuông với giá trị nạp ban đầu là
18. Do đó sóng vuông được phát ra có tần số 1,19318 MHz/18 = 66288 Hz (chu kỳ bằng
0.015s). Như vậy cứ sau 15 ms cạnh dương của sóng vuông này sẽ tạo 1 chu kỳ đọc giả
để làm tươi bộ nhớ.
Phát sóng âm với tần số biến đổi ra loa của PC: Bộ đếm 2 của PIT được dùng để
phát sóng âm ra loa của PC.
4.3. Mạch điều khiển bus 8288
Mạch điều khiển bus 8288 lấy một số tín hiệu điều khiển của CPU và cung cấp các
tín hiệu điều khiển cần thiết cho hệ vi xử lý.
IOB VCC
20
CLK
S0
S1
S2
DT/R
MCE/PDEN
ALE
DEN
AEN
CEN
MRDC
INTA
AMWC
IORC
MWTC
AIOWC
8288
123456789
19
18
17
16
15
14
13
12
11
10
IOWC
GND
Hình 1.14 – Mạch điều khiển bus 8288
IOB (Input / Output Bus Mode): điều khiển để 8288 làm việc ở các chế độ bus
khác nhau.
CLK (Clock): ngõ vào lấy từ xung clock hệ thống (từ 8284) và dùng để đồng bộ
toàn bộ các xung điều khiển đi ra từ mạch 8288.
DT/ R (Data Transmit/Receive): CPU truyền (1) hay nhận (0) dữ liệu.
ALE (Address Latch Enable): tín hiệu cho phép chốt địa chỉ, tín hiệu này thường
được nối với chân G của 74573 để điếu khiển chốt địa chỉ.
AEN (Address Enable): chờ thời gian trễ khoảng 150 ns sẽ tạo các tín hiệu điều
khiển ở đầu ra của 8288 để đảm bảo rằng địa chỉ sử dụng đã hợp lệ.
S2 , S1 , S0 : các tín hiệu trạng thái lấy trực tiếp từ CPU. Tuỳ theo các giá trị nhận
được mà 8288 sẽ đưa các tín hiệu theo bảng:
Phạm Hùng Kim Khánh Trang 17
18. Tài liệu Lập trình hệ thống Chương 1
S2 S1 S0 Tạo tín hiệu
0 0 0 INTA
0 0 1 IORC
0 1 0 IOWC, AIOWC
0 1 1 Không
1 0 0 MRDC
1 0 1 MRDC
1 1 0 MWTC, AMWC
1 1 1 Không
MRDC (Memory Read Command): điều khiển đọc bộ nhớ
MWTC (Memory Write Command): điều khiển ghi bộ nhớ
AMWC (Advanced MWTC),: giống như MWTC nhưng hoạt động sớm hơn một
chút dùng cho các bộ nhớ chậm đáp ứng kịp tốc độ CPU.
IOWC (I/O Write Command): điều khiển ghi ngoại vi
AIOWC (Advanced IOWC),: giống như IOWC nhưng hoạt động sớm hơn một
chút dùng cho các ngoại vi chậm đáp ứng kịp tốc độ CPU.
IORC (I/O Read Command): điều khiển đọc ngoại vi
INTA (Interrupt Acknowledge): ngõ ra thông báo CPU chấp nhận yêu cầu ngắt
của thiết bị ngoại vi
CEN (Command Enable): cho phép đưa ra tín hiệu DEN và các tín hiệu điều khiển
khác của 8288.
DEN (Data Enable): điều khiển bus dữ liệu thành bus cục bộ hay bus hệ thống.
MCE / PDEN (Master Cascade Enable / Peripheral Data Enable): định chế độ làm
việc cho mạch điều khiển ngắt PIC 8259 để nó làm việc ở chế độ master.
Phạm Hùng Kim Khánh Trang 18
19. Tài liệu Lập trình hệ thống Chương 1
4.4. Chip điều khiển ngắt ưu tiên PIC 8259A (Priority Interrupt Controller)
IR0
IR1
IR2
IR3
IR4
IR5
IR6
IR7
A0
INTA
CAS0
CAS1
CAS2
RD
WR SP/EN
8259A
11
10
987654
18
19
20
21
22
23
24
25
27
26
32
1
12
13
15
16
17
D0
D1
D2
D3
D4
D5
D6
D7
CS
INT
Hình 1.15 – Sơ đồ chân của 8259A
Trong trường hợp nhiều yêu cầu ngắt cần phải phục vụ, ta thường dùng vi mạch
8259A để giải quyết vấn đề ưu tiên. 8259A có thể giải quyết được 8 yêu cầu ngắt với 8
mức ưu tiên khác nhau.
™ Các khối chức năng:
IRR (thanh ghi yêu cầu ngắt): lưu trữ các yêu cầu ngắt tại ngõ vào
ISR (thanh ghi phục vụ ngắt): lưu trữ các yêu cầu ngắt đang phục vụ
IMR (thanh ghi mặt nạ ngắt): lưu trữ mặt nạ của các yêu cầu ngắt tại ngõ vào
Control logic (logic điều khiển): gởi yêu cầu ngắt tới chân INTR của CPU khi có
tín hiệu ngắt tại ngõ vào của 8259A và nhận trả lời chấp nhận yêu cầu ngắt hay không
INTA từ CPU để đưa kiểu ngắt vào CPU.
Data bus buffer (đệm bus dữ liệu): giao tiếp giữa 8259A với bus dữ liệu của CPU.
Cascade buffer / comparator (đệm nối tầng và so sánh): lưu trữ và so sánh số hiệu
của các kiểu ngắt trong trường hợp dùng nhiều mạch 8259A.
Phạm Hùng Kim Khánh Trang 19
20. Tài liệu Lập trình hệ thống Chương 1
Data bus
buffer
Read /
Write
Logic
Cascade
buffer /
comparator
ISR
(Interrupt
Service
Register)
INTERNAL BUS
Hình 1.16 – Sơ đồ khối của PIC 8259A
™ Các tín hiệu điều khiển:
INTA INT
Control logic
PR
(Priority
Resolver)
IRR
(Interrupt
Request
Register)
IMR (Interrupt Mask Register)
IR0
IR1
IR7
CAS0 ÷ 2 (In, Out): các ngõ vào chọn mạch 8259A tớ (slave) từ mạch 8259A chủ
RD
WR
A0
CS
CAS0
CAS1
CAS2
SP / EN
(master) trong trường hợp dùng nhiều mạch 8259A để tăng yêu cầu ngắt.
SP / EN (In, Out) (Slave Program / Enable Buffer): nếu 8259A hoạt động ở chế
độ không dùng đệm dữ liệu thì tín hiệu này dùng để xác định mạch 8259A là mạch chủ
(SP = 1) hay tớ (SP = 0). Nếu 8259A hoạt động ở chế độ có đệm dữ liệu thì tín hiệu này
dùng để cho phép giao tiếp giữa 8259A và CPU, khi đó mạch 8259A là master hay slave
phải dựa vào từ lệnh khởi động ICW4.
INT (Out): tín hiệu yêu cầu ngắt đưa đến CPU (chân INTR).
INTA (In): nhận trả lời chấp nhận ngắt hay không từ CPU (chân INTA)
A0: cho phép chọn các từ điều khiển của 8259A.
8259A cho phép xử lý 8 ngắt với 8 mức ưu tiên khác nhau. Trong trường hợp hệ
thống có số lượng ngắt lớn hơn thì có thể mắc nhiều 8259A liên tầng.
Phạm Hùng Kim Khánh Trang 20
22. Tài liệu Lập trình hệ thống Chương 1
Timing and
control
Priority encoder
and rotating
prority logic
Decrementor
Temp word
count register
Incrementor
Temp address
register
I/O buffer
Output buffer
Bus 16 bit
Read buffer
Base
address
Base word
count
R/W buffer
Current
address
Current
word count
Write buffer Read buffer
Command
control
A8 – A15
D0 – D1
A0 – A3
A4 – A7
Command I/O buffer
Mask
Request
RD
R/W
Mode
Status
Temp
Hình 1.18 – Sơ đồ chân và sơ đồ khối của DMAC 8237A
™ Khối Timing and Control (định thời và điều khiển):
DACK0 – DACK3
DB0 – DB7
Tạo các tín hiệu định thời và điều khiển cho bus ngoài (external bus). Các tín hiệu
EOP
RESET
CS
READY
CLK
AEN
ADSTB
MEMW
MEMR
IOW
IOR
DRQ0 – DRQ3
HLDA
HRQ
này được đồng bộ với xung clock đưa vào DMAC (tần số xung clock tối đa là 5 MHz).
™ Khối Priority encoder and rotating priority logic (mã hóa ưu tiên và
quay mức ưu tiên):
DMAC 8237A có 2 mô hình ưu tiên: mô hình ưu tiên cố định (fixed priority) và
mô hình ưu tiên quay (rotating priority). Trong mô hình ưu tiên cố định, kênh 0 sẽ có
mức ưu tiên cao nhất còn kênh 3 có mức ưu tiên thấp nhất. Còn đối với mô hình ưu tiên
quay thì mức ưu tiên khi khởi động giống như mô hình ưu tiên cố định nhưng khi yêu cầu
DMA tại một kênh nào đó được phục vụ thì sẽ được đặt xuống mức ưu tiên thấp nhất.
™ Khối Command Control (điều khiển lệnh):
Giải mã các thanh ghi lệnh (xác định thanh ghi sẽ được truy xuất và loại hoạt động
cần thực hiện).
Phạm Hùng Kim Khánh Trang 22
23. Tài liệu Lập trình hệ thống Chương 1
™ Các thanh ghi:
DMAC 8237A có tất cả 12 loại thanh ghi nội khác nhau:
Tên Kích thước (bit) Số lượng
Thanh ghi địa chỉ cơ sở (Base Address Register)
Thanh ghi đếm từ cơ sở (Base Word Count Register)
Thanh ghi địa chỉ hiện hành (Current Address Register)
Thanh ghi đếm từ hiện hành (Current Word Count Register)
Thanh ghi địa chỉ tạm (Temporary Address Register)
Thanh ghi đếm từ tạm (Temporary Word Count Register)
Thanh ghi trạng thái (Status Register)
Thanh ghi lệnh (Command Register)
Thanh ghi tạm (Temporary Register)
Thanh ghi chế độ (Mode Register)
Thanh ghi mặt nạ (Mask Register)
Thanh ghi yêu cầu (Request Register)
16
16
16
16
16
16
8
8
8
6
4
4
4
4
4
4
1
1
1
1
1
4
1
1
™ Chức năng các chân của 8237A:
CLK (Input): tín hiệu xung clock của mạch. Tín hiệu này thường được lấy từ 8284
sau khi qua cổng đảo.
CS (Input): thường được nối với bộ giải mã địa chỉ.
RESET (Input): khởi động 8237A, được nối với ngõ RESET của 8284. Khi Reset
thì thanh ghi mặt nạ được lập còn các phần sau bị xóa:
+ Thanh ghi lệnh
+ Thanh ghi trạng thái
+ Thanh ghi yêu cầu
+ Thanh ghi tạm
+ Flip-flop đầu/cuối (First/Last flip-flop)
READY (Input): nối với READY của CPU để tạo chu kỳ đợi khi truy xuất các thiết
bị ngoại vi hay bộ nhớ chậm.
HLDA (Hold Acknowledge)(Input): tín hiệu chấp nhận yêu cầu treo từ CPU
DRQ0 – DRQ3 (DMA Request)(Input): các tín hiệu yêu cầu treo từ thiết bị ngoại
vi.
DB0 – DB7 (Input, Output): nối đến bus địa chỉ và dữ liệu của CPU
Phạm Hùng Kim Khánh Trang 23
24. Tài liệu Lập trình hệ thống Chương 1
IOR , IOW (Input, Output): sử dụng trong các chu kỳ đọc và ghi
EOP (End Of Process)(Input,Output): bắt buộc DMAC kết thúc quá trình DMA
nếu là ngõ vào hay dùng để báo cho một kênh biết là dữ liệu đã chuyển xong
(Terminal count – TC), thường dùng như yêu cầu ngắt để CPU kết thúc quá trình
DMA.
A0 – A3 (Input, Output): chọn các thanh ghi trong 8237A khi lập trình hay dùng để
chứa 4 bit địa chỉ thấp.
A4 – A7 (Output): chứa 4 bit địa chỉ
HRQ (Hold Request)(Output): tín hiệu yêu cầu treo đến CPU
DACK0 – DACK3 (DMA Acknowledge)(Output): tín hiệu trả lời yêu cầu DMA cho
các kênh.
AEN (Output): cho phép lấy địa chỉ vùng nhớ cần trao đổi
ADSTB (Address Strobe)(Output): chốt các bit địa chỉ cao A8 – A15 chứa trong
các chân DB0 – DB7
MEMR, MEMW (Output): dùng để đọc / ghi bộ nhớ.
™ Các thanh ghi nội:
Các thanh ghi nội trong DMAC 8237A được truy xuất nhờ các bit địa chỉ thấp A0
– A3.
Bit địa chỉ
A3 A2 A1 A0
Địa
chỉ Chọn chức năng R/W?
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
X0
X1
X2
X3
X4
X5
X6
X7
X8
X9
XA
XB
XC
XD
XE
XF
Thanh ghi địa chỉ bộ nhớ kênh 0
Thanh ghi đếm từ kênh 0
Thanh ghi địa chỉ bộ nhớ kênh 1
Thanh ghi đếm từ kênh 1
Thanh ghi địa chỉ bộ nhớ kênh 2
Thanh ghi đếm từ kênh 2
Thanh ghi địa chỉ bộ nhớ kênh 3
Thanh ghi đếm từ kênh 3
Thanh ghi trạng thái / lệnh
Thanh ghi yêu cầu
Thanh ghi mặt nạ cho một kênh
Thanh ghi chế độ
Xóa flip-flop đầu/cuối
Xóa toàn bộ các thanh ghi / đọc thanh ghi tạm
Xóa thanh ghi mặt nạ
Thanh ghi mặt nạ
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
W
W
W
W
W/R
W
W
Phạm Hùng Kim Khánh Trang 24
25. Tài liệu Lập trình hệ thống Chương 1
Địa chỉ các thanh ghi nội dùng ghi / đọc địa chỉ:
Kênh IOR
IOW
A3 A2 A1 A0 Thanh ghi R/W?
0 1
0
1
0
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
Địa chỉ cơ sở và địa chỉ hiện hành
Địa chỉ hiện hành
Bộ đếm cơ sở và bộ đếm hiện hành
Bộ đếm hiện hành
W
R
W
R
1 1
0
1
0
0
1
0
1
0
0
0
0
0
0
0
0
1
1
1
1
0
0
1
1
Địa chỉ cơ sở và địa chỉ hiện hành
Địa chỉ hiện hành
Bộ đếm cơ sở và bộ đếm hiện hành
Bộ đếm hiện hành
W
R
W
R
2 1
0
1
0
0
1
0
1
0
0
0
0
1
1
1
1
0
0
0
0
0
0
1
1
Địa chỉ cơ sở và địa chỉ hiện hành
Địa chỉ hiện hành
Bộ đếm cơ sở và bộ đếm hiện hành
Bộ đếm hiện hành
W
R
W
R
3 1
0
1
0
0
1
0
1
0
0
0
0
1
1
1
1
1
1
1
1
0
0
1
1
Địa chỉ cơ sở và địa chỉ hiện hành
Địa chỉ hiện hành
Bộ đếm cơ sở và bộ đếm hiện hành
Bộ đếm hiện hành
W
R
W
R
Địa chỉ các thanh ghi trạng thái và điều khiển:
IOR ` IOW A3 A2 A1 A0 Thanh ghi
1
0
1
1
1
1
1
0
0
1
0
0
0
0
0
1
1
1
1
1
1
1
1
1
0
0
0
0
0
1
1
1
0
0
0
1
1
0
0
0
0
0
1
0
1
0
1
1
Ghi thanh ghi lệnh
Đọc thanh ghi trạng thái
Ghi thanh ghi yêu cầu
Ghi thanh ghi mặt nạ
Ghi thanh ghi chế độ
Xóa flip-flop đầu/cuối
Xóa tất cả các thanh ghi nội
1
0
1
0
0
1
0
1
1
1
1
1
1
1
1
1
1
1
1
1
0
0
1
1
Địa chỉ cơ sở và địa chỉ hiện hành
Địa chỉ hiện hành
Bộ đếm cơ sở và bộ đếm hiện hành
Bộ đếm hiện hành
Mạch 8273A-5 chứa 4 kênh trao đổi dữ liệu DMA với mức ưu tiên lập trình được.
8237A-5 có tốc độ truyền 1 MBps cho mỗi kênh và 1 kênh có thể truyền 1 mảng có độ dài
64 KB. Để có thể sử dụng mạch DMAC 8237A, ta cần tạo tín hiệu điều khiển như sau:
Phạm Hùng Kim Khánh Trang 25
26. Tài liệu Lập trình hệ thống Chương 1
Vcc
1A
1B
2A
2B
3A
3B
4A
4B
G
A/B
1Y
2Y
3Y
4Y
74LS257
2356
11
10
14
13
15
1
4
7
9
12
RD
WR
AEN
IO/M
IOR
IOW
MEMR
MEMW
Hình 1.19 – Tín hiệu điều khiển cho hệ thống làm việc với DMAC 8237A
Tín hiệu AEN từ 8237A dùng để cấm các tín hiệu điều khiển từ CPU khi DMAC
đã nắm quyền điều khiển bus.
4.6. Chip điều khiển màn hình CRTC 6845 (Cathode Ray Tube Controller)
RST (Reset): khởi động lại 6845.
MA0 ÷ MA13 (Memory Address): 14 địa chỉ nhớ cho RAM màn hình.
DE (Display Enable): cho phép (=1) hay không (=0) các tín hiệu điều khiển và địa
chỉ vùng hiện lên màn hình.
LPSTD (Light Pen Strobe): lưu trữ địa chỉ hiện hành của RAM màn hình trong
thanh ghi bút sáng. CPU đọc thanh ghi và xác định vị trí bút sáng trên màn hình.
CURSOR: vị trí con trỏ đã quét (=1) hay chưa (=0).
RA0
RA1
RA2
RA3
RA4
CURSOR
D0
D1
D2
D3
D4
D5
D6
D7
LPSTD
RST
6845
456789
10
11
12
13
14
15
16
17
38
37
36
35
34
19
33
32
31
30
29
28
27
26
21
23
32
24
22
25
18
39
40
MA0
MA1
MA2
MA3
MA4
MA5
MA6
MA7
MA8
MA9
MA10
MA11
MA12
MA13
CLK
E
RS
R/W
CS
DE
HS
VS
Hình 1.20 – Sơ đồ chân của 6845
Phạm Hùng Kim Khánh Trang 26
27. Tài liệu Lập trình hệ thống Chương 1
VS (Vertical Synchronization): ngõ ra tín hiệu đồng bộ quét dọc
HS (Horizontal Synchronization): ngõ ra tín hiệu đồng bộ quét ngang
RA0 ÷RA4 (Row Address): phân định hàng quét của ký tự trong chế độ văn bản
(32 hàng quét). Trong chế độ đồ họa, chúng kết hợp với MA0 ÷ MA13 tạo các địa chỉ cho
các bank RAM màn hình.
D0 ÷ D7: đường dữ liệu.
CS : chọn chip.
RS (Regigter Select): chọn thanh ghi địa chỉ (=0) hay thanh ghi dữ liệu (=1).
E: xung âm kích hoạt bus dữ liệu và dùng như xung clock cho 6845 đọc / ghi dữ
liệu vào các thanh ghi bên trong.
R/W : đọc / ghi dữ liệu vào các thanh ghi.
CLK: dùng đồng bộ với tín hiệu của màn hình và thường bằng tốc độ hiện ký tự
trên màn hình.
4.7. Chip đồng xử lý toán học 8087/80287/80387 (Mathematical co-processor)
Các bộ đồng xử lý toán 80x87 hỗ trợ CPU trong việc tính toán các biểu thức dùng
dấu chấm động như cộng, trừ, nhân, chia các số dấu chấm động, căn thức, logarit, …
Chúng cho phép xử lý các phép toán này nhanh hơn nhiều so với CPU. Thời gian xử lý
giữa 8087 và 8086 như sau (dùng xung clock 8 MHz):
Phép toán 8087 [μs] 8086 [μs]
Cộng / trừ
10.6
1000
Nhân
11.9
1000
Chia
24.4
2000
Căn bậc hai
22.5
12250
Tang
56.3
8125
Lũy thừa
62.5
10680
Lưu trữ
13.1
750
™ 8087:
8087 gồm một đơn vị điều khiển (CU – Control Unit) dùng để điều khiển bus và
một đơn vị số học (NU – Numerical Unit) để thực hiện các phép toán dấu chấm động
trong các mạch tính lũy thừa (exponent module) và mạch tính phần định trị (mantissa
module). Khác với 8086, thay vì dùng các thanh ghi rời rạc là một ngăn xếp thanh ghi.
Phạm Hùng Kim Khánh Trang 27
28. Tài liệu Lập trình hệ thống Chương 1
Đơn vị điều khiển nhận và giải mã lệnh, dọc và ghi các toán hạng, chạy các lệnh
điều khiển riêng của 8087. Do đó, CU có thể đồng bộ với CPU trong khi NU đang thực
hiện các công việc tính toán. CU bao gồm bộ điều khiển bus, bộ đệm dữ liệu và hàng
lệnh.
CU - Control Unit NU - Numerical Unit
Từ điều khiển
Từ trạng thái
Đệm dữ liệu
Điều khiển bus
Bộ điều
khiển số
Module lũy
thừa
Từ thẻ
Thanh ghi
Hình 1.21 – Sơ đồ khối của 8087
INT (8259)
IRx (8259)
AD0
AD1
AD2
AD3
AD4
AD5
AD6
AD7
CLK
BUSY
QS0
QS1
READY
RQ/GT0
RQ/GT1
RST
BHE/S7
8087
16
15
14
13
12
11
10
9
19
23
25
24
22
31
33
21
34
8765432
39
38
37
36
35
26
27
28
32
AD8
AD9
AD10
AD11
AD12
AD13
AD14
AD15
A16/S3
A17/S4
A18/S5
A19/S6
S0
S1
S2
INT
16
15
14
13
12
11
10
9
19
18
33
17
22
31
30
21
23
AD0
AD1
AD2
AD3
AD4
AD5
AD6
AD7
CLK
INTR
MX
NMI
READY
RQ/GT0
RQ/GT1
RST
TEST
Hình 1.22 – Sơ đồ kết nối 8087 và CPU 8086
Module
định trị
ngăn xếp
Bus dữ liệu
Địa chỉ trạng thái
CLK (8284)
8086
8765432
39
38
37
36
35
26
27
28
34
29
25
24
32
AD8
AD9
AD10
AD11
AD12
AD13
AD14
AD15
A16/S3
A17/S4
A18/S5
A19/S6
S0
S1
S2
BHE/S7
LOCK
QS0
QS1
RD
Phạm Hùng Kim Khánh Trang 28
29. Tài liệu Lập trình hệ thống Chương 1
Ngăn xếp thanh ghi có tất cả 8 thanh ghi từ R0 ÷ R7, mỗi thanh ghi dài 80 bit trong
đó bit 79 là bit dấu, bit 64 ÷ 78 dùng cho số mũ và phần còn lại là phần định trị. Dữ liệu
truyền giữa các thanh ghi này được thực hiện rất nhanh do 8087 có độ rộng bus dữ liệu là
84 bit và không cần phải biến đổi định dạng.
Ngay sau khi reset PC, bộ đồng xử lý kiểm tra xem nó có được nối với PC hay
không bằng các đường BHE /S7. 8087 sẽ điều chỉnh độ dài của hàng lệnh cho phù hợp với
CPU (nếu dùng 8086 thì độ dài là 6 byte).
8087 có một thanh ghi trạng thái là thanh ghi từ thẻ (tag word) gồm các cặp bit
Tag0 ÷ Tag7 để lưu trữ các thông tin liên quan đến nội dung của các thanh ghi R0 ÷ R7
để cho phép thực hiện một số tác vụ nhanh hơn. Mỗi thanh ghi từ thẻ có 2 bit xác định 4
giá trị khác nhau của các thanh ghi Ri.
Tag = 00: xác định
Tag = 01: zero
Tag = 10: NAN, giá trị bất thường
Tag = 11: rỗng
™ 80287:
S0
S1
CLK
CLK286
CMD0
CMD1
COD/INTA
CKM
HLDA
NPS1
NPS2
NPRD
NPWR
PEACK
READY
RESET
80287
23
22
21
20
19
18
17
16
15
14
12
11
8765
26
25
24
21
32
37
29
31
3
39
38
34
33
27
28
36
40
35
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
ERROR
BUSY
PEREQ
S0
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
CAP
CLK
BUSY
ERROR
HOLD
INTR
NMI
PEREQ
READY
80286
36
38
40
42
44
46
48
50
37
39
41
43
45
47
49
51
52
31
54
53
64
57
59
61
63
29
RST
S1
Hình 1.23 – Sơ đồ kết nối giữa 80286 và 80287
S0
S1
S0 13
S1
X1
X2
ARDY
AYEN
EFI
F/C
RES
SRDY
SYEN
CLK
PCLK
READY
RESET
82284
15
16
78
1
17
5
6
11
23
10
4
12
82288
19
3
18
2
15
14
76
1
13
12
11
89
5
16
17
4
S0
S1
M/IO
CLK
CEN/AEN
CENL
CMDLY
MB
READY
INTA
IORC
IOWC
MRDC
MWTC
ALE
DEN
DT/R
MCE
34
33
32
28
27
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
87
54
1
66
65
68
67
6
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
A17
A18
A19
A20
A21
A22
A23
BHE
COD/INTA
HLDA
LOCK
M/IO
PEACK
S0
S1
S0 13
S1
X1
X2
ARDY
AYEN
EFI
F/C
RES
SRDY
SYEN
82284
15
16
78 1
17
5
6
11
23
10
4
12
CLK
PCLK
READY
RESET
Phạm Hùng Kim Khánh Trang 29
S0
S0
S1
S1
30. Tài liệu Lập trình hệ thống Chương 1
Do 80286 có chế độ mạch bảo vệ nên mạch ghép nối giữa 80286 và 80287 được
thiết kế khác 8087 ở đơn vị điều khiển CU. Bộ đồng xử lý ở đây không thực hiện truy
xuất bộ nhớ trực tiếp. Để truy xuất được bộ nhớ, 80287 không những cần một đơc vị định
địa chỉ đơn giản của nó mà còn phải được tăng cường thêm chức năng quản lý bộ nhớ của
80286. Cấu trúc bên trong của 80287 cũng tương tự như 8087, chỉ có đơn vị bus thay đổi
cho phù hợp với 80286. Khác vơi 8087, 80287 hoạt động không đồng bộ với CPU nên có
thể dùng xung clock riêng.
™ 80387:
Ưu điểm của 80387 so với 80287 là có thể thực hiện các phép toán số học nhanh
hơn. No có bus dữ liệu 32 bit như CPU và sử dụng công nghệ CMOS nên công suất tiêu
thụ thấp hơn.
5. Bộ thanh ghi
μP 8086/8088 có tất cả 14 thanh ghi nội. Các thanh ghi này có thể phân loại như
sau:
- Thanh ghi dữ liệu (data register)
- Thanh ghi chỉ số và con trỏ (index & pointer register)
- Thanh ghi đoạn (segment register)
- Thanh ghi trạng thái và điều khiển (status & control register)
5.1. Các thanh ghi dữ liệu
Các thanh ghi dữ liệu gồm có các thanh ghi 16 bit AX, BX, CX và DX trong đó
nửa cao và nửa thấp của mỗi thanh ghi có thể định địa chỉ một cách độc lập. Các nửa
thanh ghi này (8 bit) có tên là AH và AL, BH và BL, CH và CL, DH và DL.
Các thanh ghi này được sử dụng trong các phép toán số học và logic hay trong quá
trình chuyển dữ liệu.
Bảng 2.8:
Thanh ghi Sử dụng trong
AX MUL, IMUL (toán hạng nguồn kích thước word)
DIV, IDIV (toán hạng nguồn kích thước word)
IN (nhập word)
OUT (xuất word)
CWD
Các phép toán xử lý chuỗi (string)
AL MUL, IMUL (toán hạng nguồn kích thước byte)
DIV, IDIV (toán hạng nguồn kích thước byte)
IN (nhập byte)
OUT (xuất byte)
XLAT
AAA, AAD, AAM, AAS (các phép toán ASCII)
CBW (đổi sang word)
Phạm Hùng Kim Khánh Trang 30
31. Tài liệu Lập trình hệ thống Chương 1
DAA, DAS (số thập phân)
Các phép toán xử lý chuỗi (string)
AH MUL, IMUL (toán hạng nguồn kích thước byte)
DIV, IDIV (toán hạng nguồn kích thước byte)
CBW (đổi sang word)
BX XLAT
CX LOOP, LOOPE, LOOPNE
Các phép toán string với tiếp dầu ngữ REP
CL RCR, RCL, ROR, ROL (quay với số đếm byte)
SHR, SAR, SAL (dịch với số đếm byte)
DX MUL, IMUL (toán hạng nguồn kích thước word)
DIV, IDIV (toán hạng nguồn kích thước word)
AX (ACC – Accumulator): thanh ghi tích luỹ
BX (Base): thanh ghi cơ sở
CX (Count): đếm
DX (Data): thanh ghi dữ liệu
5.2. Các thanh ghi chỉ số và con trỏ
Bao gồm các thanh ghi 16 bit SP, BP, SI và DI, thường chứa các giá trị offset (độ
lệch) cho các phần tử định địa chỉ trong một phân đoạn (segment). Chúng có thể được sử
dụng trong các phép toán số học và logic. Hai thanh ghi con trỏ (SP – Stack Pointer và BP
– Base Pointer) cho phép truy xuất dễ dàng đến các phần tử đang ở trong ngăn xếp (stack)
hiện hành. Các thanh ghi chỉ số (SI – Source Index và DI – Destination Index) được dùng
để truy xuất các phần tử trong các đoạn dữ liệu và doạn thêm (extra segment). Thông
thường, các thanh ghi con trỏ liên hệ đến đoạn stack hiện hành và các thanh ghi chỉ số liên
hệ đến doạn dữ liệu hiện hành. SI và DI dùng trong các phép toán chuỗi.
5.3. Các thanh ghi đoạn
Bao gồm các thanh ghi 16 bit CS (Code segment), DS (Data segment), SS (stack
segment) và ES (extra segment), dùng để định địa chỉ vùng nhớ 1 MB bằng cách chia
thành 16 đoạn 64 KB.
Tất cả các lệnh phải ở trong đoạn mã hiện hành, được định địa chỉ thông qua thanh
ghi CS. Offset (độ lệch) của mã được xác định bằng thanh ghi IP. Dữ liệu chương trình
thường được đặt ở đoạn dữ liệu, định vị thông qua thanh ghi DS. Stack định vị thông qua
thanh ghi SS. Thanh ghi đoạn thêm có thể sử dụng để định địa chỉ các toán hạng, dữ liệu,
bộ nhớ và các phần tử khác ngoài đoạn dữ liệu và stack hiện hành.
5.4. Các thanh ghi điều khiển và trạng thái
Thanh ghi con trỏ lệnh IP (Instruction Pointer) giống như bộ đếm chương trình
(Program Counter). Thanh ghi điều khiển này do BIU quản lý nhằm lưu trữ offset từ bắt
đầu đoạn mã đến lệnh thực thi kế tiếp. Ta không thể xử lý trực tiếp trên thanh ghi IP.
Phạm Hùng Kim Khánh Trang 31
32. Tài liệu Lập trình hệ thống Chương 1
Thanh ghi cờ (Flag register) hay từ trạng thái 16 bit chứa 3 bit điều khiển (TF, IF
và DF) và 6 bit trạng thái (OF, SF, ZF, AF, PF và CF) còn các bit còn lại mà 8086/8088
không sử dụng thì không thể truy xuất được.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
X X X X OF DF IF TF SF ZF X AF X PF X CF
- OF (Overflow - tràn): OF = 1 xác định tràn số học, xảy ra khi kết quả vượt ra
ngoài phạm vi biểu diễn
- DF (Direction- hướng): xác định hướng chuyển string, DF = 1 khi μP làm việc
với string theo thứ tự từ phải sang trái.
- IF (Interrupt - ngắt): cho phép hay cấm các interrupt có mặt nạ
- TF (Trap - bẫy): đặt μP vào chế độ từng bước, dùng cho các chương trình gỡ
rối (debugger).
- SF (Sign - dấu): dùng để chỉ các kết quả số học là số dương (SF = 0) hay âm
(SF = 1).
- ZF (Zero): = 1 nếu kết quả của phép toán trước là 0.
- AF (Auxiliary – nhớ phụ): dùng trong các số thập phân để chỉ nhớ từ nửa byte
thấp hay mượn từ nửa byte cao.
- PF (Parity): PF = 1 nếu kết quả của phép toán là có tổng số bit 1 là chẵn (dùng
để kiểm tra lỗi truyền dữ liệu)
- CF (Carry): CF = 1 nếu có nhớ hay mượn từ bit cao nhất của kết quả. Cờ này
cũng dùng cho các lệnh quay.
Phạm Hùng Kim Khánh Trang 32