Perceptron [’58 Rosenblatt]
—原理
学習手続
1. 重みベクトルを w = (0, . . ., 0) で初期化
2. 現在の重みでの判定結果 g
3. 本来の正しい判定結果 a ∈ {1, −1}
4. a · g > 0 なら判定成功 or フィードバック
判定: 重み w と入力 p の内積 (の正負)
◮ w · p
フィードバック
◮ 正しい結果の向きに入力分だけ重みを更新
w := w + ap
29.
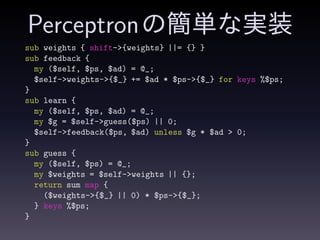
Perceptronの簡単な実装
sub weights {shift->{weights} ||= {} }
sub feedback {
my ($self, $ps, $ad) = @_;
$self->weights->{$_} += $ad * $ps->{$_} for keys %$ps;
}
sub learn {
my ($self, $ps, $ad) = @_;
my $g = $self->guess($ps) || 0;
$self->feedback($ps, $ad) unless $g * $ad > 0;
}
sub guess {
my ($self, $ps) = @_;
my $weights = $self->weights || {};
return sum map {
($weights->{$_} || 0) * $ps->{$_};
} keys %$ps;
}



![AdaBoost [’95 Freund, Schapire]
特徴
◮ 弱分類器の重みと閾値を自動的に決定
◮ 弱分類器は弱すぎなければなんでもよい
◮ 精度が 50%以上なら全体精度も向上
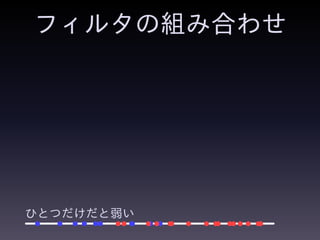
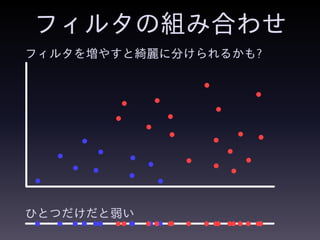
◮ いろんな弱分類器をいい具合に組み合わせ可能
原理
◮ 入力にも重みを持たせる (最初はぜんぶ 1)
◮ 弱分類器を順に学習
◮ 弱分類器の重みと閾値の最適値を決定
◮ 前の弱分類器が誤判定した入力は, 後の弱分類
器では重みを上げて学習](https://image.slidesharecdn.com/slide-150618021430-lva1-app6892/85/BrandSafe-24-320.jpg)
![Perceptron [’58 Rosenblatt]
特徴
◮ 多次元の入力の重みづけをいい感じにする
◮ 計算がすごく簡単 (実装も簡単)
◮ 教科書に載ってるレベルで枯れている
◮ 近年見直されさまざまな改良が
実装方針
◮ ひとまず単純な実装
◮ キーワードの出現ベクトルが入力
◮ 精度を見つつ改良版を試す](https://image.slidesharecdn.com/slide-150618021430-lva1-app6892/85/BrandSafe-27-320.jpg)
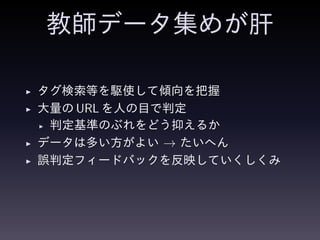
![Perceptron [’58 Rosenblatt]
— 原理
学習手続
1. 重みベクトルを w = (0, . . ., 0) で初期化
2. 現在の重みでの判定結果 g
3. 本来の正しい判定結果 a ∈ {1, −1}
4. a · g > 0 なら判定成功 or フィードバック
判定: 重み w と入力 p の内積 (の正負)
◮ w · p
フィードバック
◮ 正しい結果の向きに入力分だけ重みを更新
w := w + ap](https://image.slidesharecdn.com/slide-150618021430-lva1-app6892/85/BrandSafe-28-320.jpg)