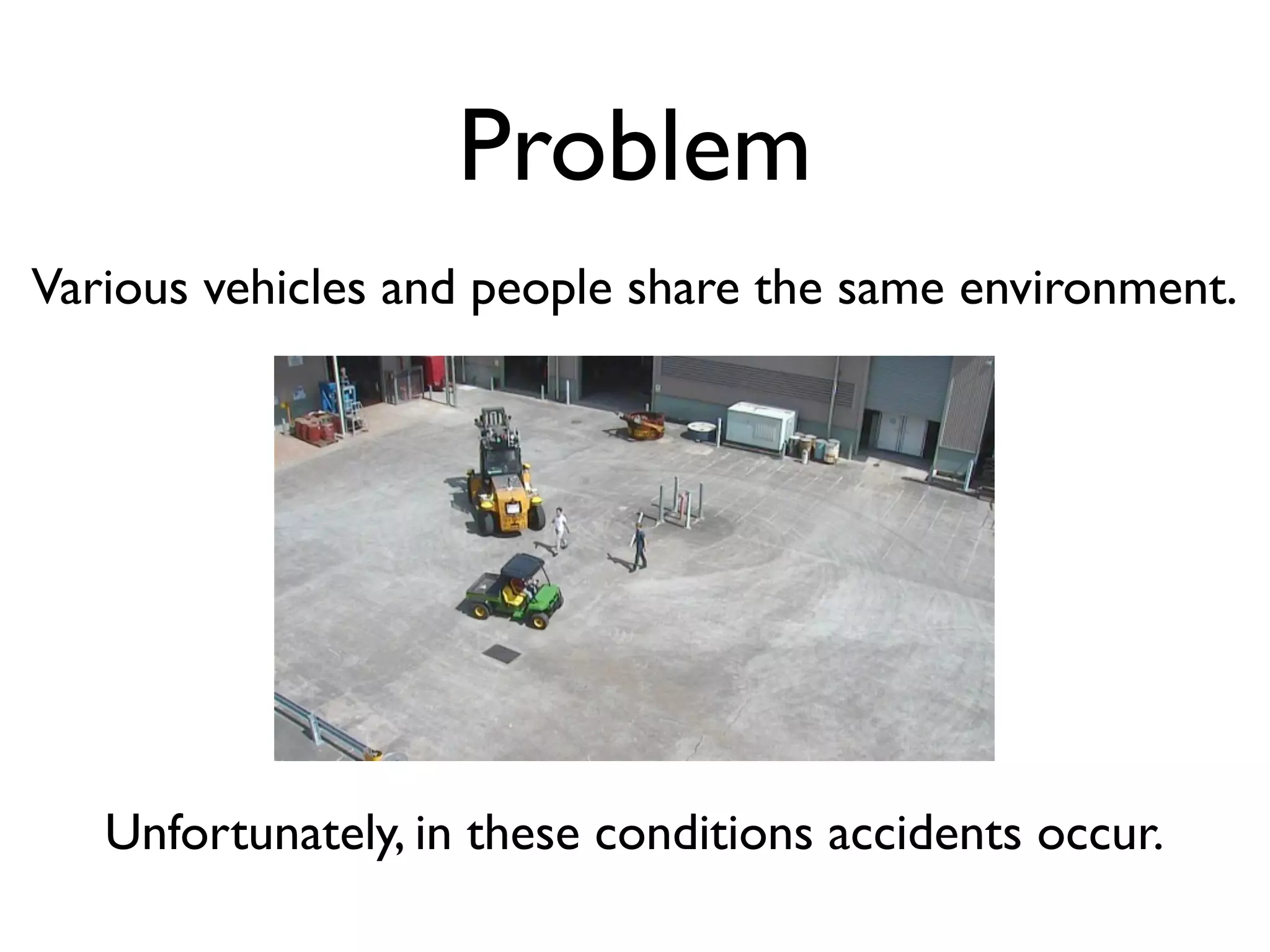
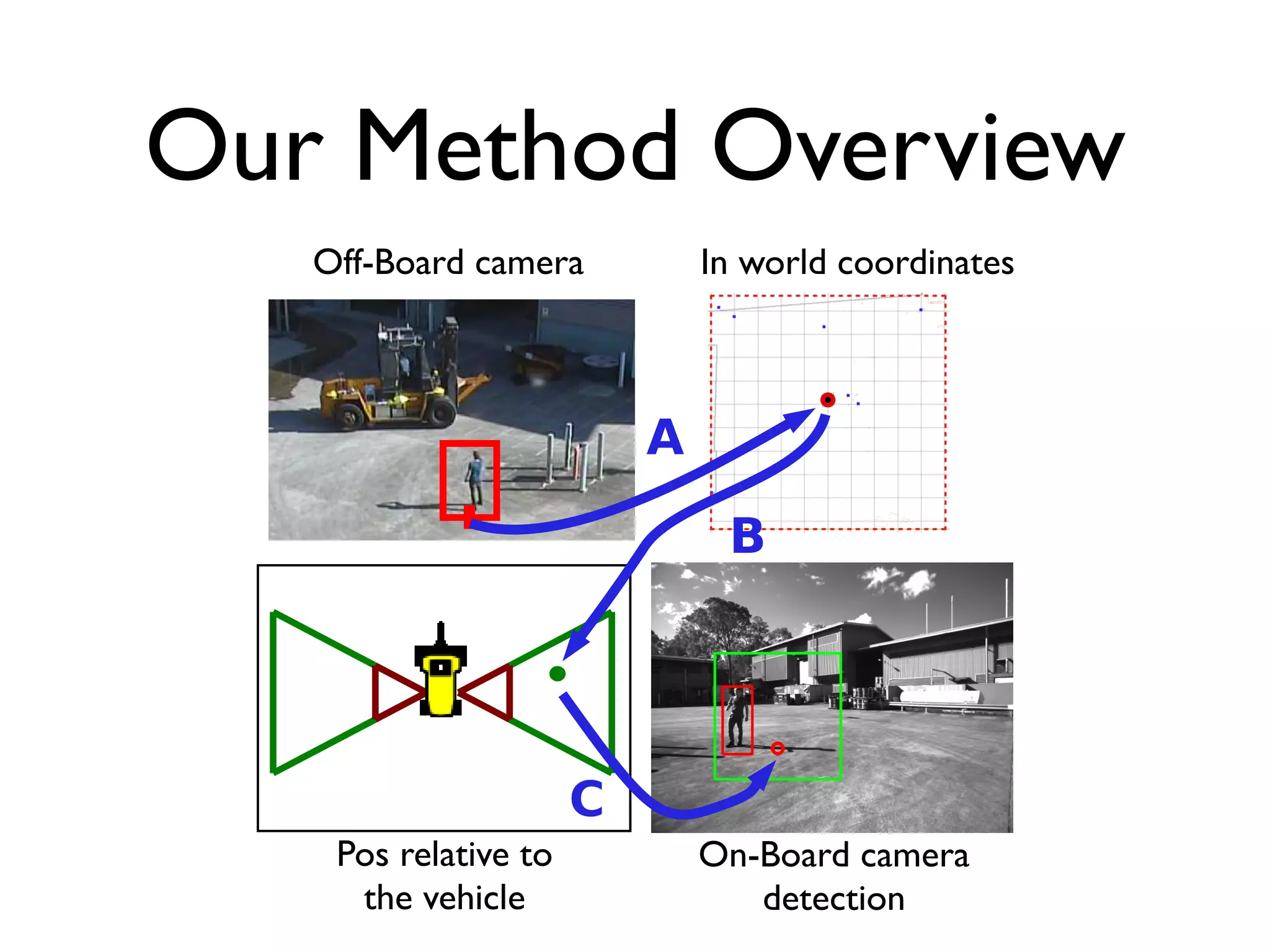
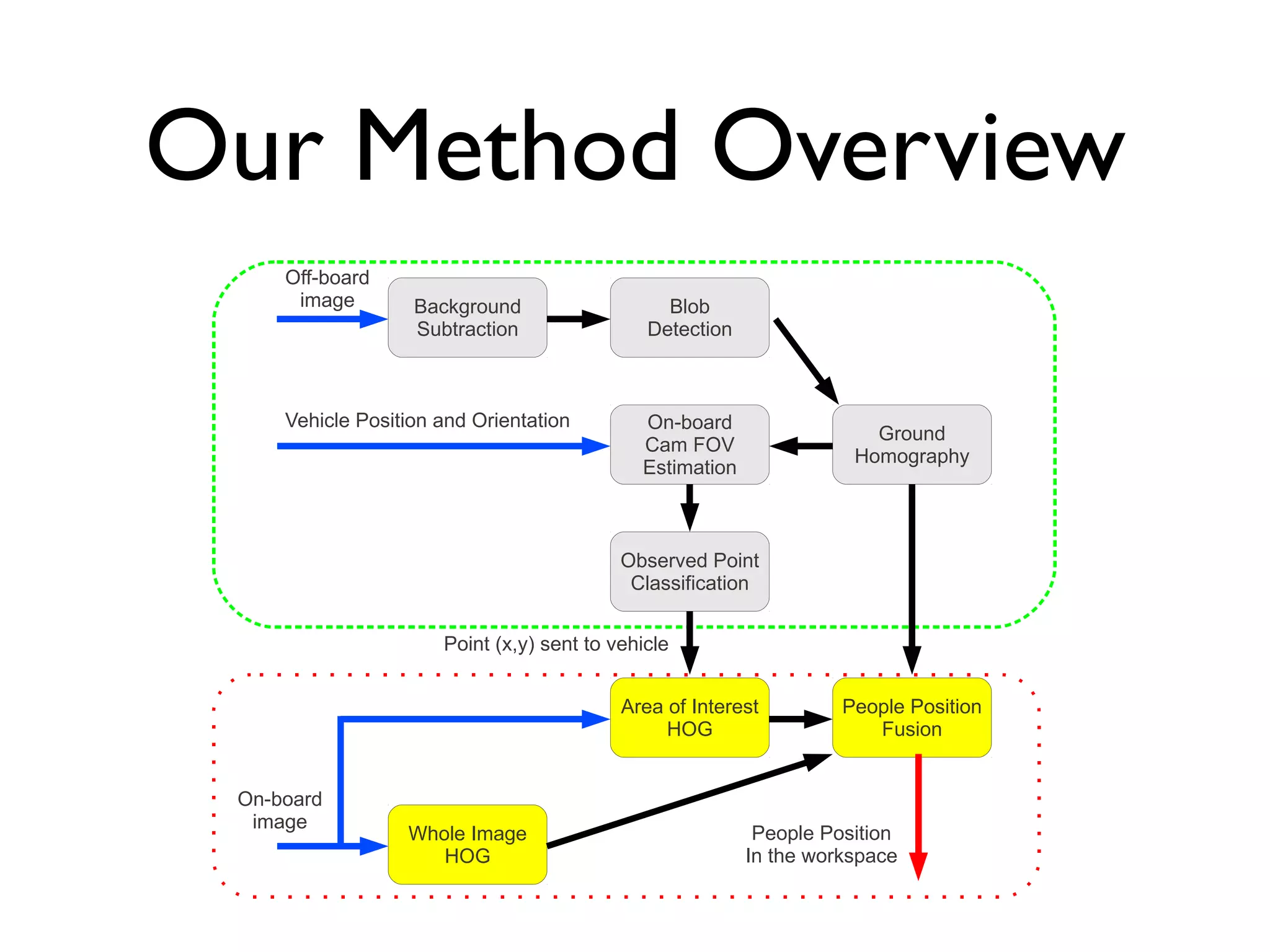
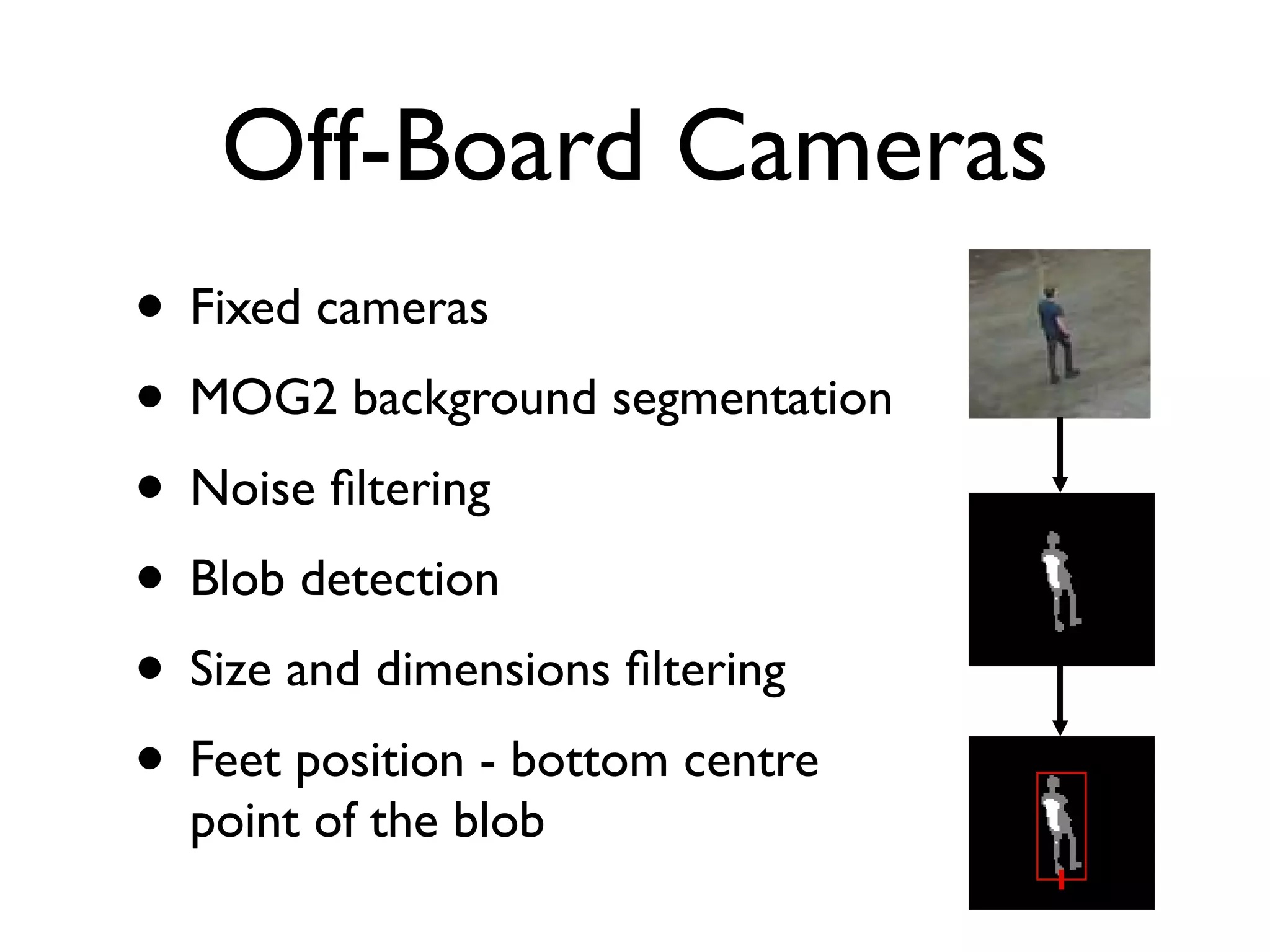
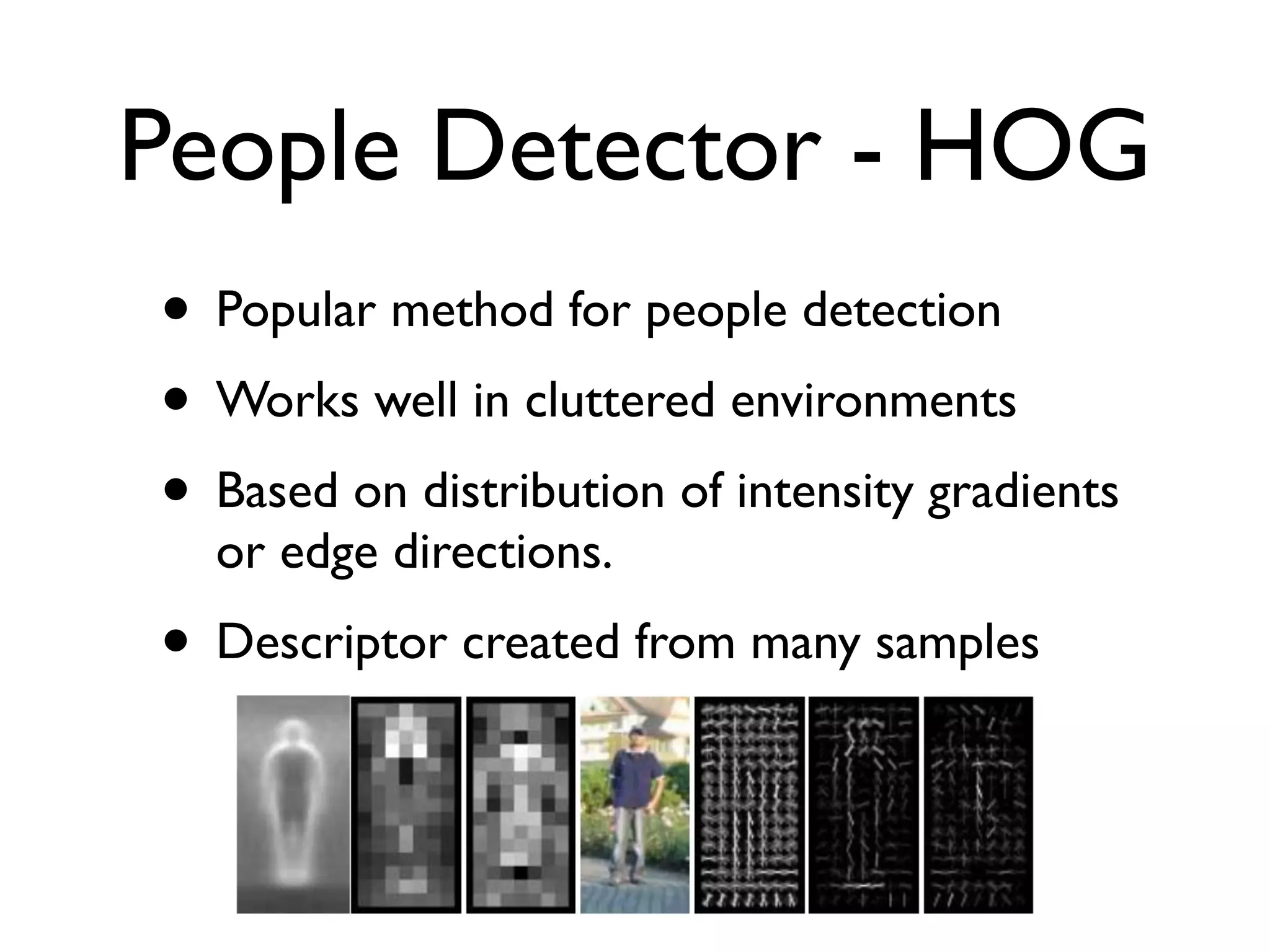
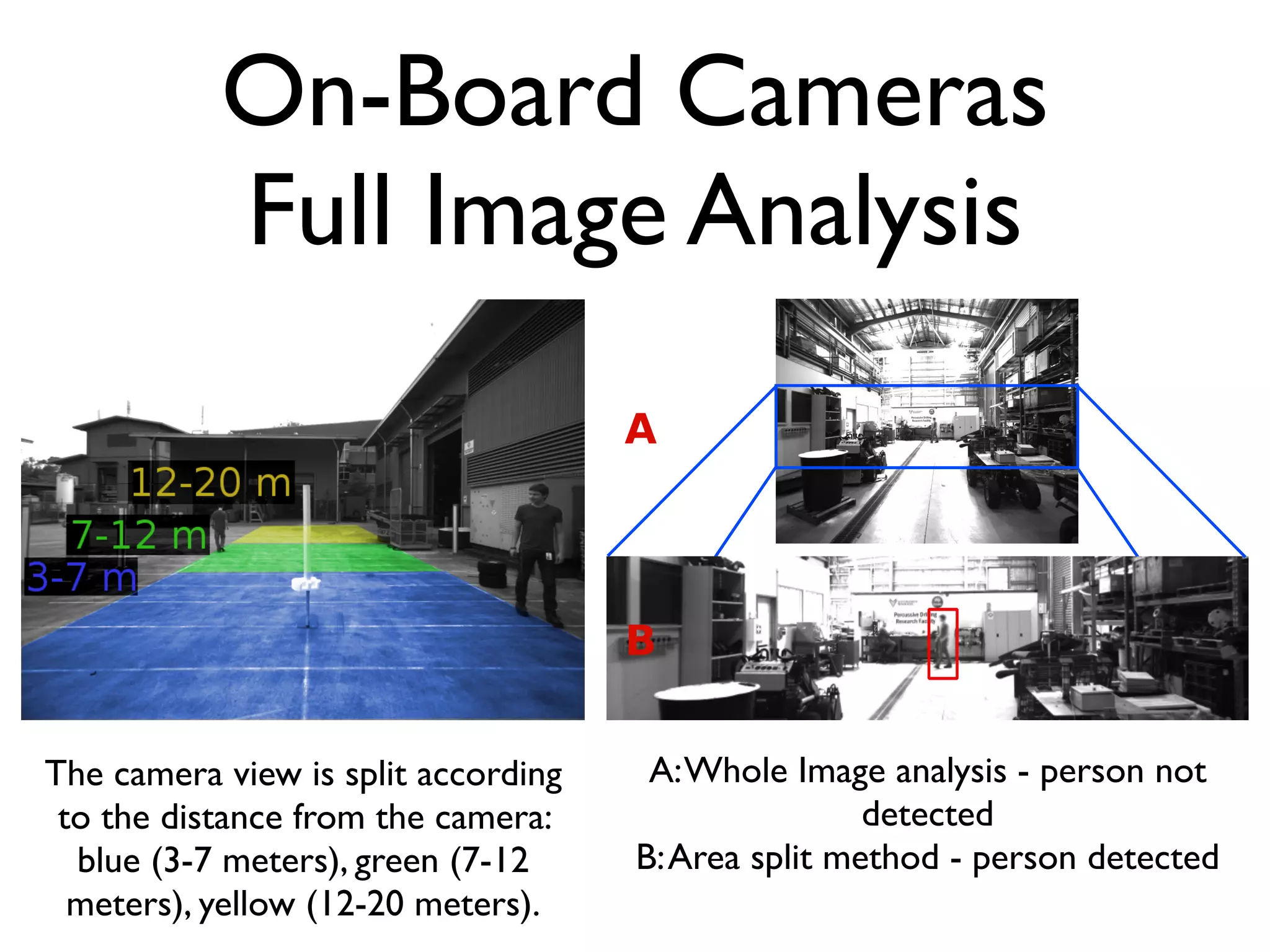
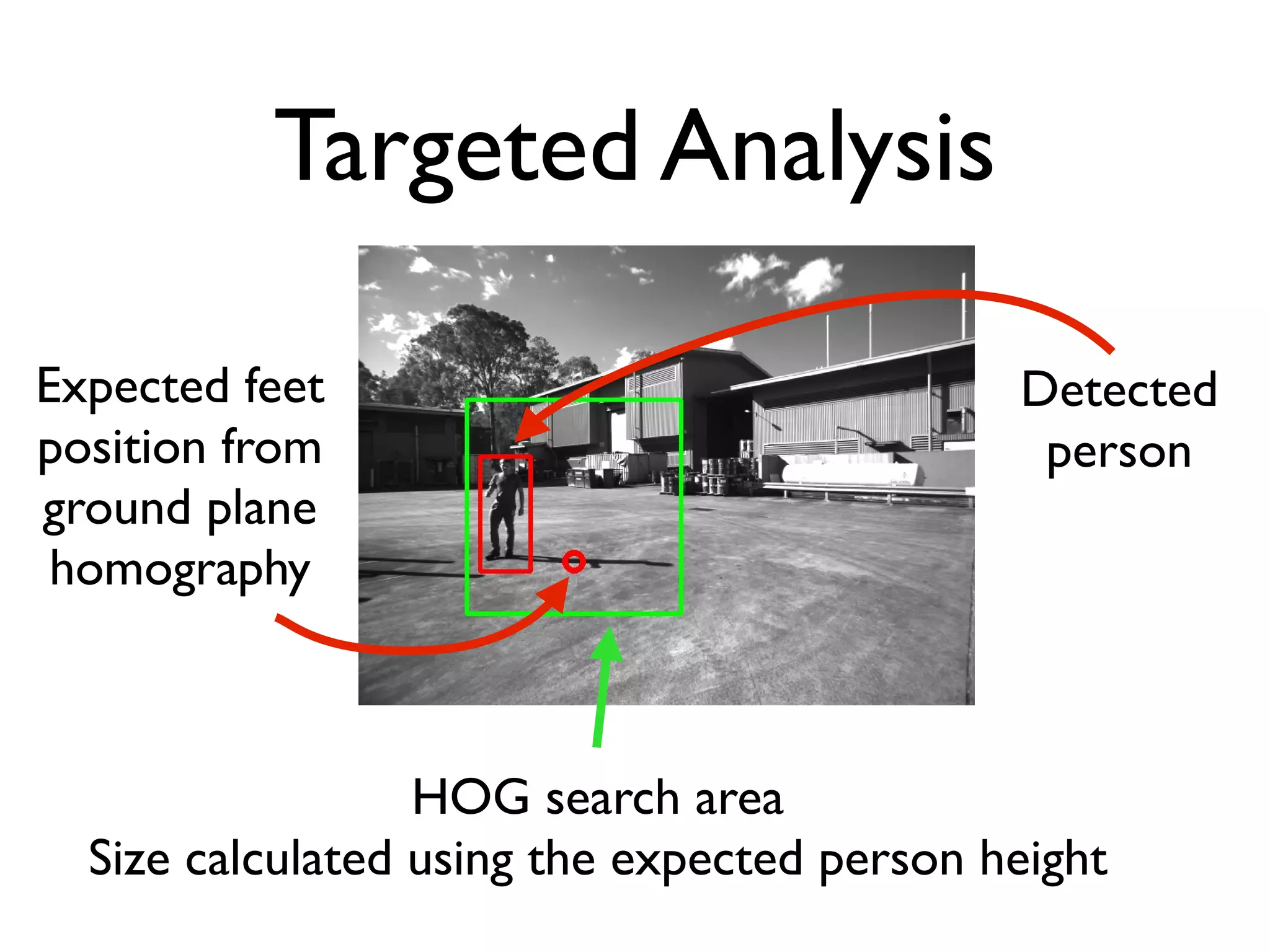
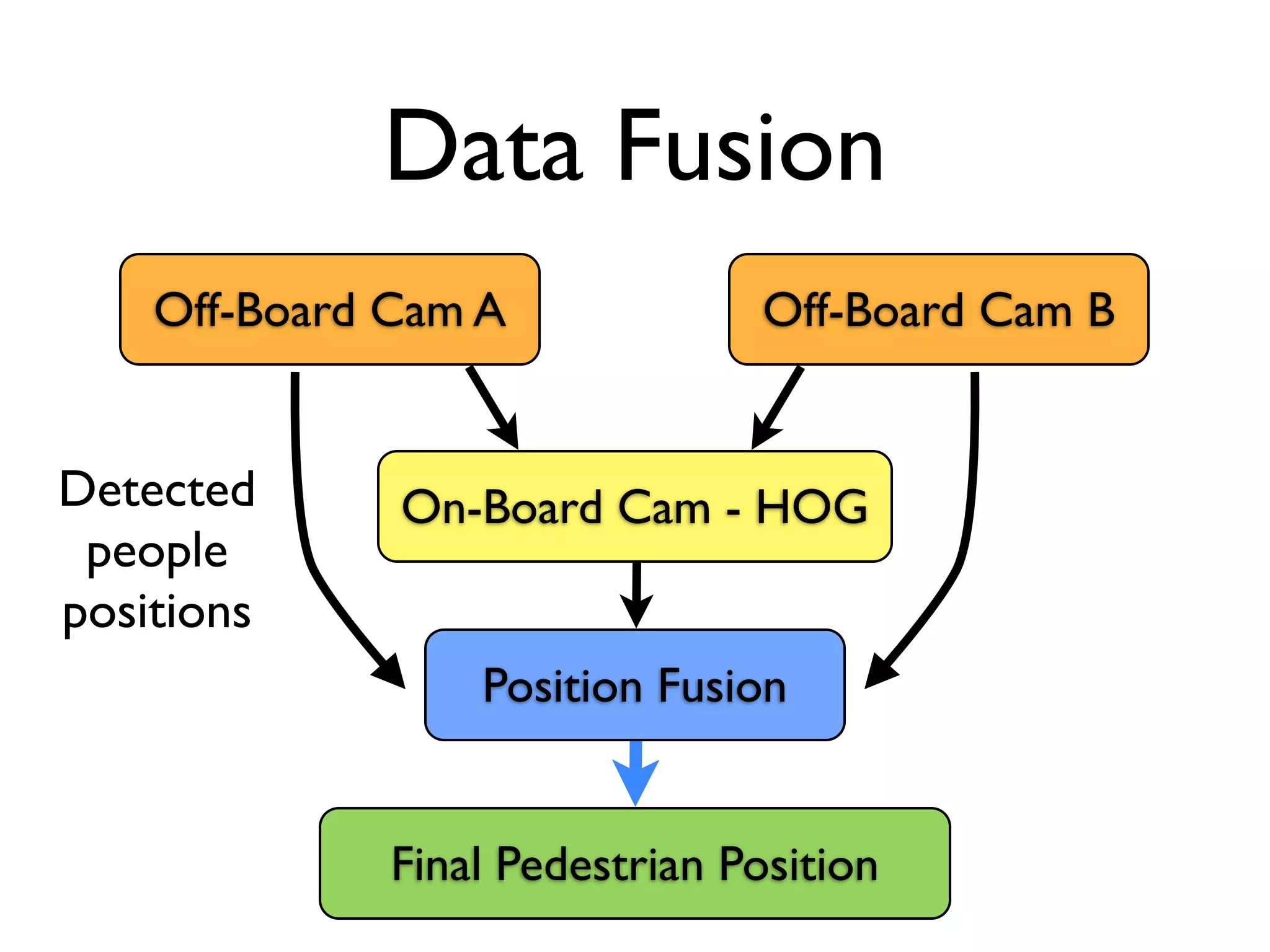
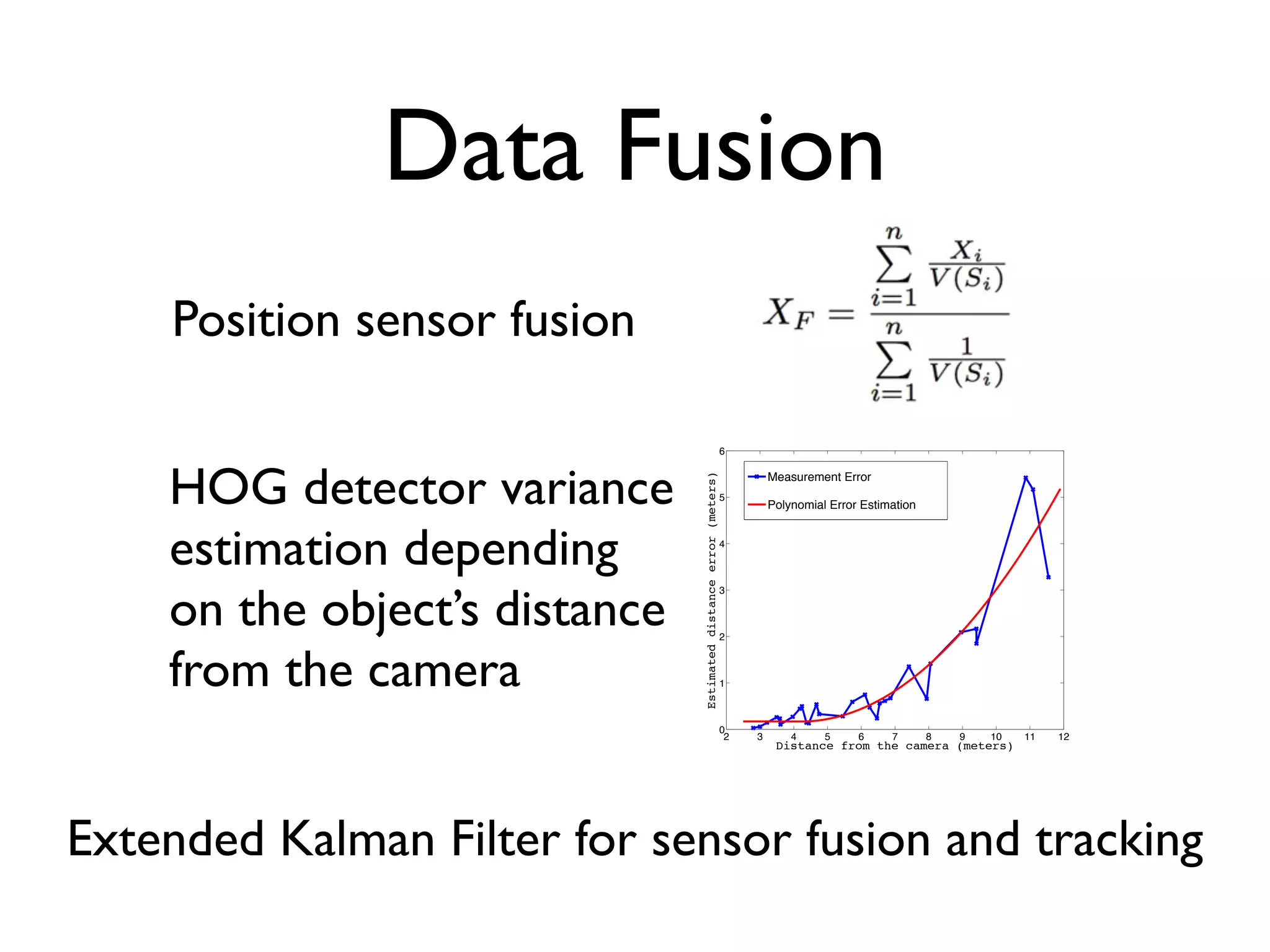
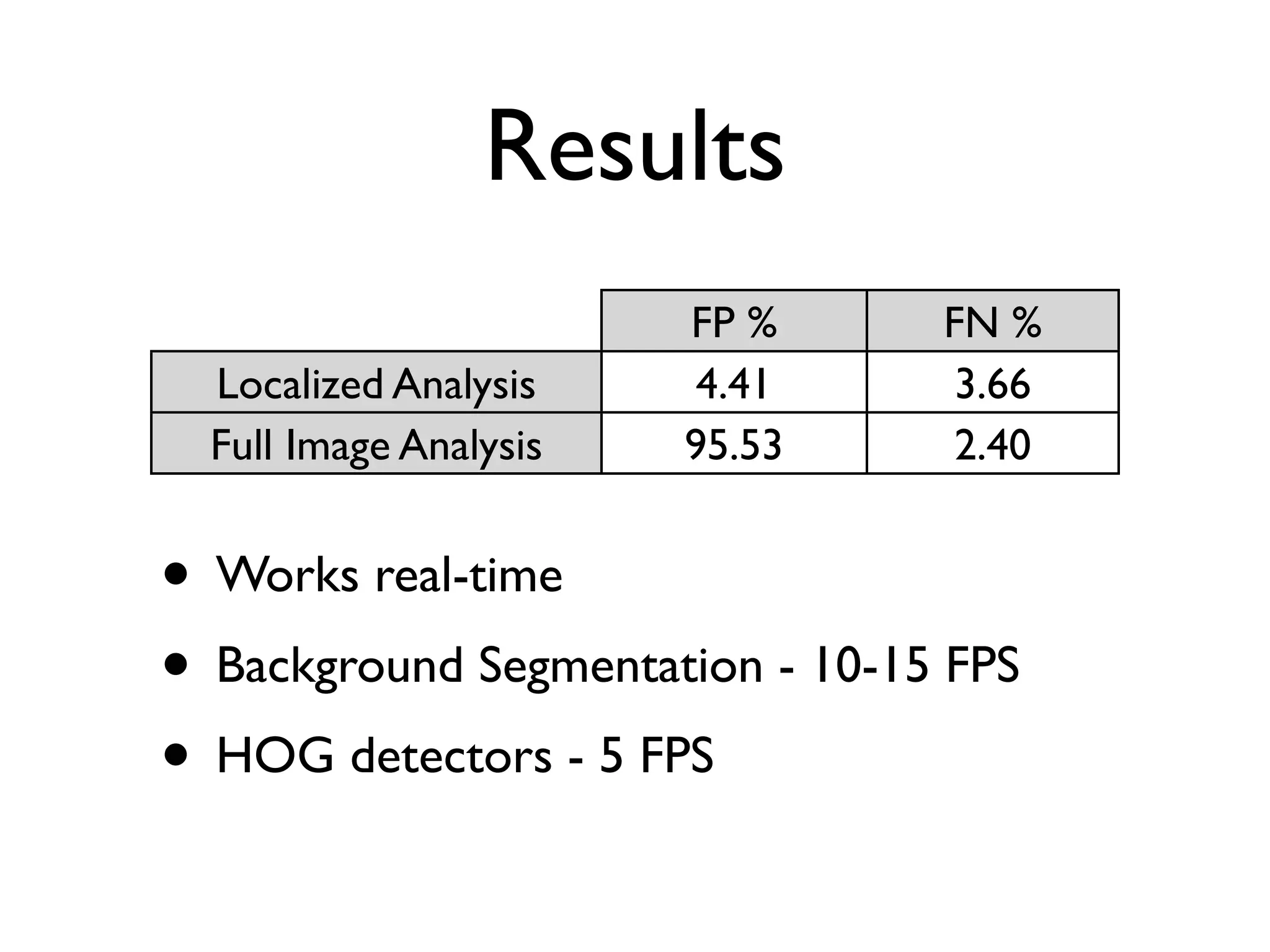
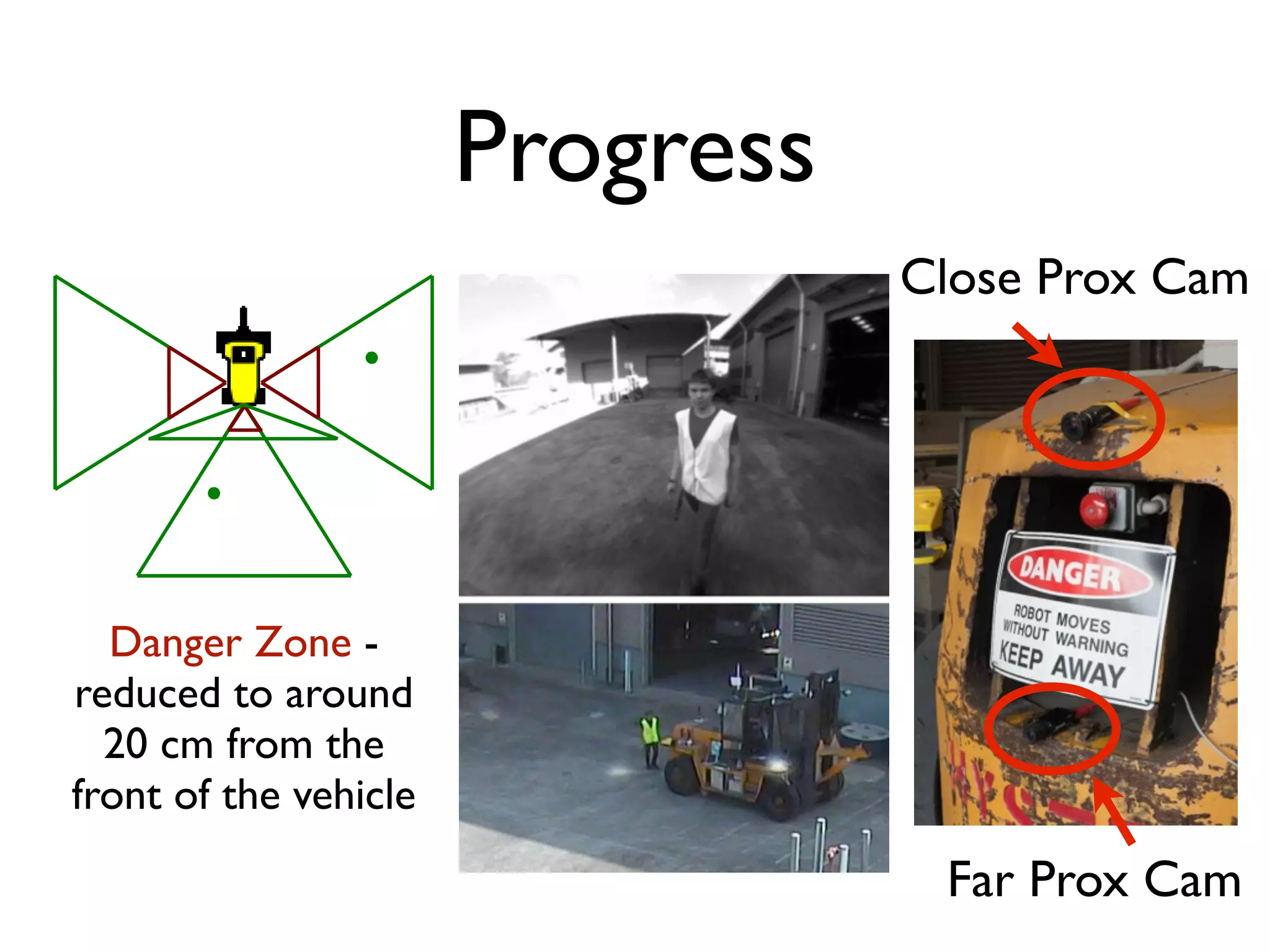

This document proposes a method to jointly detect humans from on-board and off-board cameras to prevent vehicle-pedestrian accidents. It uses fixed off-board cameras for detection and localization of pedestrians in the environment. On-board cameras on the vehicle are then used to detect pedestrians within detection zones determined from the off-board cameras. An extended Kalman filter fuses the sensor data for improved tracking of pedestrians. Initial experiments show the method works in real-time with improved detection rates compared to only using on-board cameras. Future work involves adding more cameras and GPU processing for improved detection and tracking capabilities.






















































