Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
情報処理学会 情報システム教育委員会
PDF, PPTX
70 views
プログラミングロボットを用いたオンライン併用型の協調学習実践
情報処理学会 情報システム教育委員会主催の第14回情報システム教育コンテスト (http://miyagawa.si.aoyama.ac.jp/wiki/isecon_2021) 優秀賞の発表スライド
Education
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 22
2
/ 22
3
/ 22
4
/ 22
5
/ 22
6
/ 22
7
/ 22
8
/ 22
9
/ 22
10
/ 22
11
/ 22
12
/ 22
13
/ 22
14
/ 22
15
/ 22
16
/ 22
17
/ 22
18
/ 22
19
/ 22
20
/ 22
21
/ 22
22
/ 22
More Related Content
PPT
計算機理論入門02
by
Tomoyuki Tarumi
PDF
Arduinoでプログラミングに触れてみよう
by
Hiromu Yakura
PDF
[修士論文] 入力支援機能を備えた日本語表記による初学者向けプログラミング学習環境の構築
by
Ryota Nakamura
PDF
[xDNCL] 配布資料
by
Ryota Nakamura
PDF
kagami_comput2016_01
by
swkagami
PDF
kagamicomput201701
by
swkagami
PDF
kagami_comput2015_1
by
swkagami
PDF
[CE81] プログラミング入門教育用学習環境PEN
by
Ryota Nakamura
計算機理論入門02
by
Tomoyuki Tarumi
Arduinoでプログラミングに触れてみよう
by
Hiromu Yakura
[修士論文] 入力支援機能を備えた日本語表記による初学者向けプログラミング学習環境の構築
by
Ryota Nakamura
[xDNCL] 配布資料
by
Ryota Nakamura
kagami_comput2016_01
by
swkagami
kagamicomput201701
by
swkagami
kagami_comput2015_1
by
swkagami
[CE81] プログラミング入門教育用学習環境PEN
by
Ryota Nakamura
Similar to プログラミングロボットを用いたオンライン併用型の協調学習実践
PDF
V6 unix in okinawa
by
magoroku Yamamoto
PDF
Python physicalcomputing
by
Noboru Irieda
PDF
マイコンロボット実習
by
Takehiko YOSHIDA
PPTX
C言語 学習教材
by
Jun MITANI
PDF
U-16プログラミングコンテスト CHaser を利用したプログラミング指導
by
NISHIHARA Shota
PDF
アルゴリズムのハードウェア化から学ぶ問題解決教育プログラム
by
情報処理学会 情報システム教育委員会
PDF
kagami_comput2015_12
by
swkagami
PDF
Pad入門その1
by
長岡技術科学大学 自然言語処理研究室
PPTX
Arduino 入門
by
mitunaga
PDF
kagamicomput201714
by
swkagami
PDF
kagami_comput2015_14
by
swkagami
PDF
kagamicomput201801
by
swkagami
PDF
kagami_comput2016_07
by
swkagami
PDF
kagami_comput2015_7
by
swkagami
PDF
kagamicomput201707
by
swkagami
PDF
2012研究室紹介(大川)
by
猛 大川
PDF
#6:実数と繰り返し
by
長岡技術科学大学 自然言語処理研究室
PDF
kagami_comput2016_12
by
swkagami
PDF
kagamicomput201712
by
swkagami
PDF
programming camp 2008, introduction of programming, algorithm
by
Hiro Yoshioka
V6 unix in okinawa
by
magoroku Yamamoto
Python physicalcomputing
by
Noboru Irieda
マイコンロボット実習
by
Takehiko YOSHIDA
C言語 学習教材
by
Jun MITANI
U-16プログラミングコンテスト CHaser を利用したプログラミング指導
by
NISHIHARA Shota
アルゴリズムのハードウェア化から学ぶ問題解決教育プログラム
by
情報処理学会 情報システム教育委員会
kagami_comput2015_12
by
swkagami
Pad入門その1
by
長岡技術科学大学 自然言語処理研究室
Arduino 入門
by
mitunaga
kagamicomput201714
by
swkagami
kagami_comput2015_14
by
swkagami
kagamicomput201801
by
swkagami
kagami_comput2016_07
by
swkagami
kagami_comput2015_7
by
swkagami
kagamicomput201707
by
swkagami
2012研究室紹介(大川)
by
猛 大川
#6:実数と繰り返し
by
長岡技術科学大学 自然言語処理研究室
kagami_comput2016_12
by
swkagami
kagamicomput201712
by
swkagami
programming camp 2008, introduction of programming, algorithm
by
Hiro Yoshioka
More from 情報処理学会 情報システム教育委員会
PDF
ゲームを用いた疑似体験によるシステムデザインの導入教育
by
情報処理学会 情報システム教育委員会
PDF
事業会社のデジタル人材育成のためのワークショップ(情報処理学会ISECON2024)
by
情報処理学会 情報システム教育委員会
PDF
実配線体験が可能な論理回路シミュレータの開発とその評価(情報処理学会ISECON2023)
by
情報処理学会 情報システム教育委員会
PDF
地方自治体職員を対象としたeラーニングによるDX人材育成(情報処理学会ISECON2023)
by
情報処理学会 情報システム教育委員会
PDF
システム開発プロセスの実践的学修
by
情報処理学会 情報システム教育委員会
PDF
社会システムの分解と理解で学ぶ教育手法「ReBaLe」の提案
by
情報処理学会 情報システム教育委員会
PDF
サイエンスとプログラミングを 合わせた小中学生向け教育の実践
by
情報処理学会 情報システム教育委員会
PDF
社会人向けサイバーセキュリティ講座「セキュアシステム設計・開発」の実践
by
情報処理学会 情報システム教育委員会
PDF
企業と連携した情報システム企画の実践的教育取り組み、改善とその評価
by
情報処理学会 情報システム教育委員会
PDF
Office365での視覚障害者自立・就労訓練のための学習支援システムの構築
by
情報処理学会 情報システム教育委員会
PDF
非情報系学生を対象としたソフトウェア開発演習の設計と継続的改善
by
情報処理学会 情報システム教育委員会
PDF
テレワーク環境でのコンフリクトを疑似体験するワークショップ(情報処理学会ISECON2023)
by
情報処理学会 情報システム教育委員会
PDF
遠隔演習環境の開発と運用を通したプログラミング教育の改革
by
情報処理学会 情報システム教育委員会
PDF
卒業生・企業人・教員のチームティーチングによる実践的ICT人材育成教育
by
情報処理学会 情報システム教育委員会
PDF
職種研究ワークショップを通したIT人材育成の取組み
by
情報処理学会 情報システム教育委員会
PDF
大学における地域連携型社会実装PBLのカリキュラムデザイン
by
情報処理学会 情報システム教育委員会
PDF
1人1台情報端末時代に向けた小学校英語教材オンライン化の取組
by
情報処理学会 情報システム教育委員会
PDF
オープンデータ観光アプリ開発を題材とした発展的多学年PBL
by
情報処理学会 情報システム教育委員会
PDF
簡易的IoTプロトタイプ構築を通したSTEAM教育講座の開発
by
情報処理学会 情報システム教育委員会
PDF
PCに依存しない幼児・低学年の プログラミング教育カリキュラム
by
情報処理学会 情報システム教育委員会
ゲームを用いた疑似体験によるシステムデザインの導入教育
by
情報処理学会 情報システム教育委員会
事業会社のデジタル人材育成のためのワークショップ(情報処理学会ISECON2024)
by
情報処理学会 情報システム教育委員会
実配線体験が可能な論理回路シミュレータの開発とその評価(情報処理学会ISECON2023)
by
情報処理学会 情報システム教育委員会
地方自治体職員を対象としたeラーニングによるDX人材育成(情報処理学会ISECON2023)
by
情報処理学会 情報システム教育委員会
システム開発プロセスの実践的学修
by
情報処理学会 情報システム教育委員会
社会システムの分解と理解で学ぶ教育手法「ReBaLe」の提案
by
情報処理学会 情報システム教育委員会
サイエンスとプログラミングを 合わせた小中学生向け教育の実践
by
情報処理学会 情報システム教育委員会
社会人向けサイバーセキュリティ講座「セキュアシステム設計・開発」の実践
by
情報処理学会 情報システム教育委員会
企業と連携した情報システム企画の実践的教育取り組み、改善とその評価
by
情報処理学会 情報システム教育委員会
Office365での視覚障害者自立・就労訓練のための学習支援システムの構築
by
情報処理学会 情報システム教育委員会
非情報系学生を対象としたソフトウェア開発演習の設計と継続的改善
by
情報処理学会 情報システム教育委員会
テレワーク環境でのコンフリクトを疑似体験するワークショップ(情報処理学会ISECON2023)
by
情報処理学会 情報システム教育委員会
遠隔演習環境の開発と運用を通したプログラミング教育の改革
by
情報処理学会 情報システム教育委員会
卒業生・企業人・教員のチームティーチングによる実践的ICT人材育成教育
by
情報処理学会 情報システム教育委員会
職種研究ワークショップを通したIT人材育成の取組み
by
情報処理学会 情報システム教育委員会
大学における地域連携型社会実装PBLのカリキュラムデザイン
by
情報処理学会 情報システム教育委員会
1人1台情報端末時代に向けた小学校英語教材オンライン化の取組
by
情報処理学会 情報システム教育委員会
オープンデータ観光アプリ開発を題材とした発展的多学年PBL
by
情報処理学会 情報システム教育委員会
簡易的IoTプロトタイプ構築を通したSTEAM教育講座の開発
by
情報処理学会 情報システム教育委員会
PCに依存しない幼児・低学年の プログラミング教育カリキュラム
by
情報処理学会 情報システム教育委員会
プログラミングロボットを用いたオンライン併用型の協調学習実践
1.
プログラミングロボットを用いた オンライン併用型の協調学習実践 布施 泉・野口孝文 北海道大学情報基盤センター
2.
✓ プログラミングロボット • 機械語命令で動作(特定プログラミング言語を用いない) •
ロボット単独でもPCからでも、プログラム作成&実行 ✓ 授業構成:個別学習+協調学習 • 個別学習:ロボットの操作に慣れる • 協調学習:グループでの作品制作 ✓ 作品制作のバリエーション:描画・音・センサー • ロボット一台に対しメンバーが協力してプログラム(2018年) • メンバーのロボットを連携して作品制作 • 対面(2019年)& オンライン併用(2020・2021年) ✓ オンライン上での協調学習 • 調査結果:対面と同等の満足度で実践可能 • 対面とオンライン割合:教育効果を確認した上でPDCA改善 本教育実践(大学1年生の授業)の特徴
3.
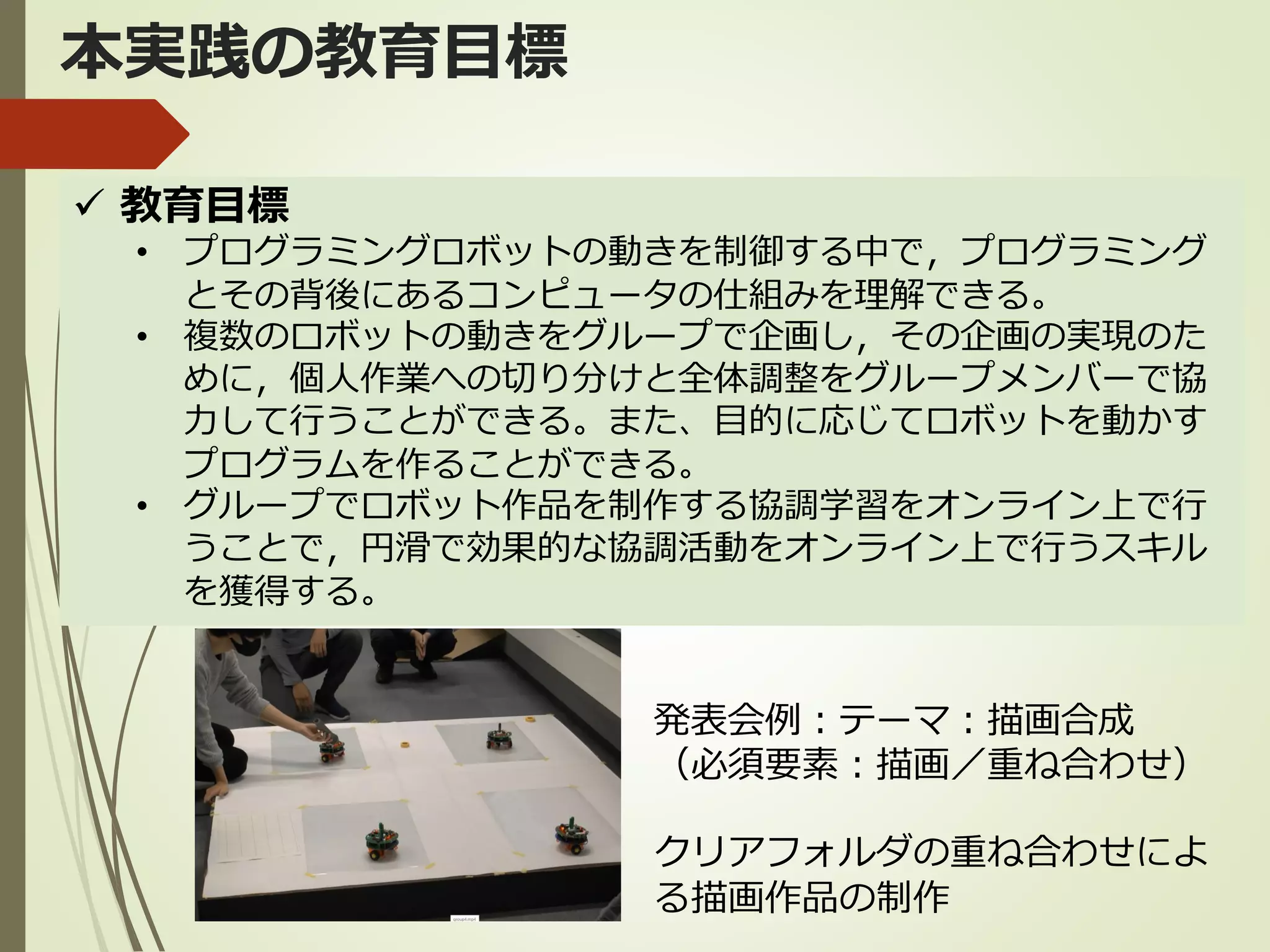
本実践の教育目標 ✓ 教育目標 • プログラミングロボットの動きを制御する中で,プログラミング とその背後にあるコンピュータの仕組みを理解できる。 •
複数のロボットの動きをグループで企画し,その企画の実現のた めに,個人作業への切り分けと全体調整をグループメンバーで協 力して行うことができる。また、目的に応じてロボットを動かす プログラムを作ることができる。 • グループでロボット作品を制作する協調学習をオンライン上で行 うことで,円滑で効果的な協調活動をオンライン上で行うスキル を獲得する。 発表会例:テーマ:描画合成 (必須要素:描画/重ね合わせ) クリアフォルダの重ね合わせによ る描画作品の制作
4.
ロボットへのプログラム入力 ✓ 機械語命令で動作 • 8個の赤LEDの点灯状態で直感的に理解できる移動動作 命令 •
命令セットには演算命令等の他,モータ制御やセンサ 入力を読み取る命令を用意 ボタンスイッチ 1 2 ON 実行 プログラム スライドスイッチ 電源 操作インターフェース ロボット単体 or PC利用 ロボット単体で仕組み確認 → 複雑なプログラムはPCで
5.
8個の赤LEDの点灯状態で直感的に理解可能な 移動・回転動作命令 ✓ 移動・回転・停止命令は基本8bitの命令で構成 4bitで左右のモータの制御、右4bitで動作量(重み付) 右4bit:移動時は距離、回転時は角度、停止時は時間の重み モータの動作 (赤LED左4bit) 移動距離または角度または時間 (赤LED右4bit) 左モータ正回転 右モータ正回転 右モータ逆回転 左モータ逆回転 8cm /
60度 / 2秒 4cm / 30度 / 1秒 2cm / 15度 / 0.5秒 1cm / 7.5度 / 0.25秒 赤色LED(点灯が1を表す) 黄色LED ボタンスイッチ 3 4 5 例:ロボットが10cm前進する命令(機械語命令では「5A」) 左右モータは正回転(左4bit:0101),前進 8+2cm(右4bitが1010)
6.
命令の種類(1) 命令 記述 機械語
プログラム例,説明 前進 FWD n 5n:0101 n8n4n2n1 54,4cm前進します. 後退 REV n An:1010 n8n4n2n1 A4,4cm後退します. 右回転 RGT n 6n:0110 n60n30n15n7.5 68,60度右へ回転します. 左回転 LFT n 9n:1001 n60n30n15n7.5 9C,90度左へ回転します. 停止 STP n 0n:0000 n2n1n0.5n0.25 04,1秒間停止します. 前進レジスタA 後退レジスタA 右回転レジスタA 左回転レジスタA 停止レジスタA FWD A REV A RGT A LFT A STP A 50:0101 0000 A0:1010 0000 60:0110 0000 90:1001 0000 00:1001 0000 B7 08,(LDI 08)レジスタAに8を代入 50, (FWD A)8cm前進 レジスタAの値は8ビット有効です.大き な値をセットしたときには動作範囲が大 きくなるので,机から落ちたりしないよ う注意が必要です. 円弧 ARC xnxm 8/4n 2/1m (nはR/F mはR/F) ※2Byte命令 44 13,左車輪が4cm前進,右車輪が 3cm前進し弧を描きます.(x:F 前進ま たはR後退を指定) 不規則動作 IRG 30:0011 0000 不規則にいろいろな動作をします 速度 SPD n 3n:0011 nnnn 3C,低速(1)から高速(15),高速はモー タにより制限が有ります サウンド SND n 7n: 0111 nnnn 70:サウンド停止, 71~7F:ドC4~ドC6 238番地から252番地に音程データが有 ります 乱数セット RND B0:1011 0000 レジスタAに0~255の乱数をセット 表示オン DSP ON B1:1011 0001 レジスタAの値をLEDに表示します. 1増し INC B2:1011 0010 レジスタAの値を1増します. 1減 DEC B3:1011 0011 レジスタAの値を1減じます.
7.
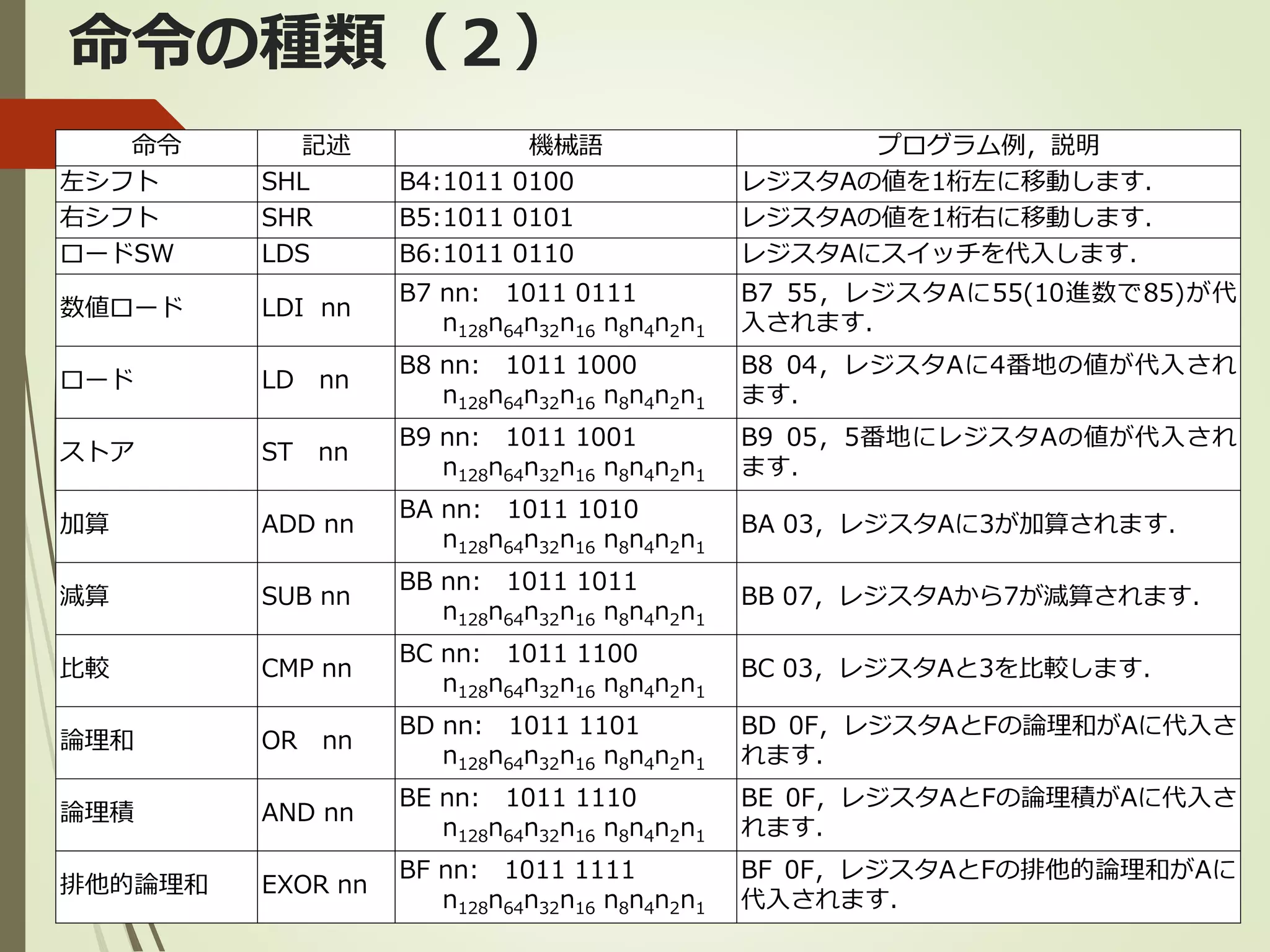
命令の種類(2) 命令 記述 機械語
プログラム例,説明 左シフト SHL B4:1011 0100 レジスタAの値を1桁左に移動します. 右シフト SHR B5:1011 0101 レジスタAの値を1桁右に移動します. ロードSW LDS B6:1011 0110 レジスタAにスイッチを代入します. 数値ロード LDI nn B7 nn: 1011 0111 n128n64n32n16 n8n4n2n1 B7 55,レジスタAに55(10進数で85)が代 入されます. ロード LD nn B8 nn: 1011 1000 n128n64n32n16 n8n4n2n1 B8 04,レジスタAに4番地の値が代入され ます. ストア ST nn B9 nn: 1011 1001 n128n64n32n16 n8n4n2n1 B9 05,5番地にレジスタAの値が代入され ます. 加算 ADD nn BA nn: 1011 1010 n128n64n32n16 n8n4n2n1 BA 03,レジスタAに3が加算されます. 減算 SUB nn BB nn: 1011 1011 n128n64n32n16 n8n4n2n1 BB 07,レジスタAから7が減算されます. 比較 CMP nn BC nn: 1011 1100 n128n64n32n16 n8n4n2n1 BC 03,レジスタAと3を比較します. 論理和 OR nn BD nn: 1011 1101 n128n64n32n16 n8n4n2n1 BD 0F,レジスタAとFの論理和がAに代入さ れます. 論理積 AND nn BE nn: 1011 1110 n128n64n32n16 n8n4n2n1 BE 0F,レジスタAとFの論理積がAに代入さ れます. 排他的論理和 EXOR nn BF nn: 1011 1111 n128n64n32n16 n8n4n2n1 BF 0F,レジスタAとFの排他的論理和がAに 代入されます.
8.
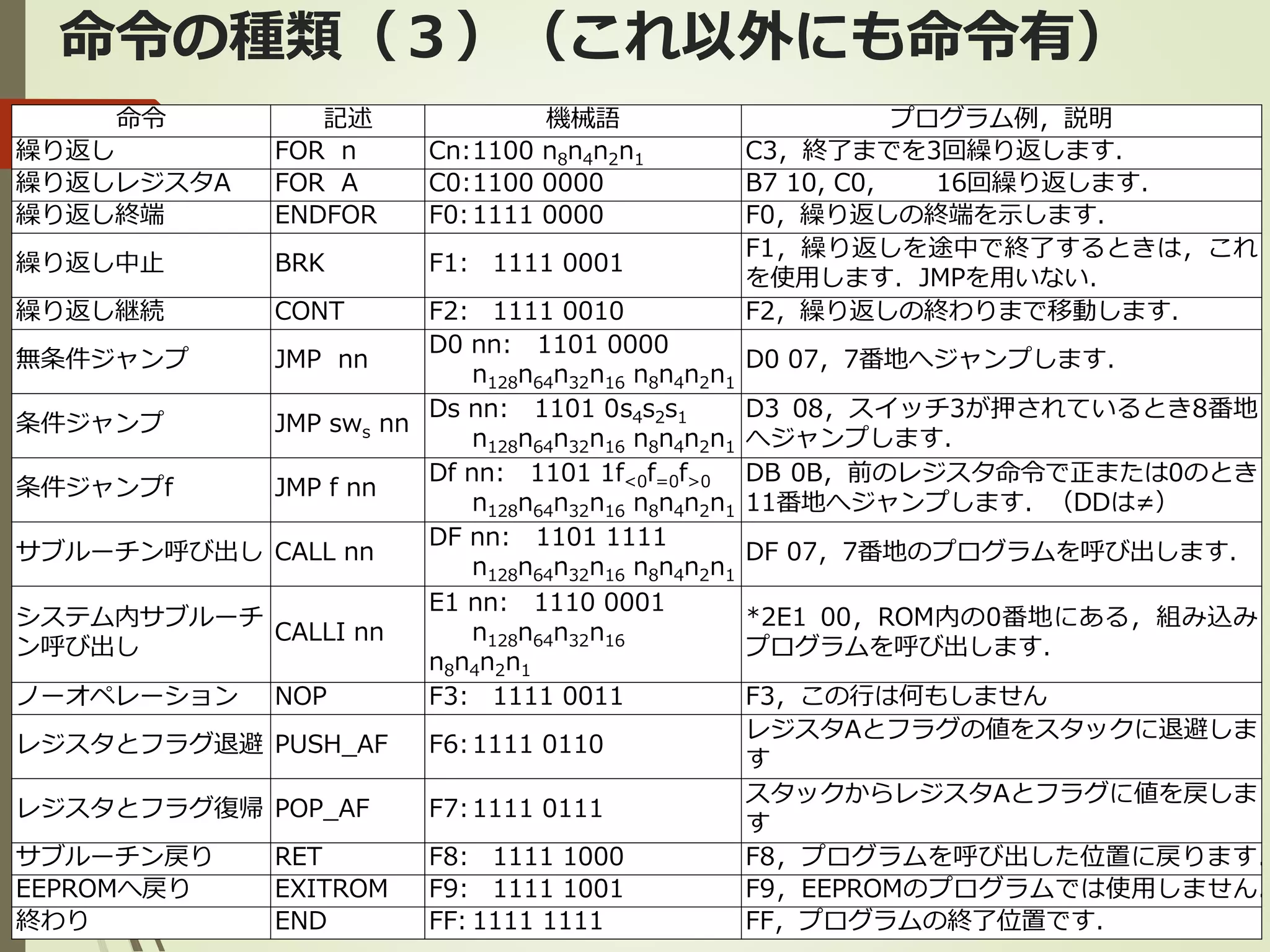
命令の種類(3)(これ以外にも命令有) 命令 記述 機械語
プログラム例,説明 繰り返し FOR n Cn:1100 n8n4n2n1 C3,終了までを3回繰り返します. 繰り返しレジスタA FOR A C0:1100 0000 B7 10, C0, 16回繰り返します. 繰り返し終端 ENDFOR F0:1111 0000 F0,繰り返しの終端を示します. 繰り返し中止 BRK F1: 1111 0001 F1,繰り返しを途中で終了するときは,これ を使用します.JMPを用いない. 繰り返し継続 CONT F2: 1111 0010 F2,繰り返しの終わりまで移動します. 無条件ジャンプ JMP nn D0 nn: 1101 0000 n128n64n32n16 n8n4n2n1 D0 07,7番地へジャンプします. 条件ジャンプ JMP sws nn Ds nn: 1101 0s4s2s1 n128n64n32n16 n8n4n2n1 D3 08,スイッチ3が押されているとき8番地 へジャンプします. 条件ジャンプf JMP f nn Df nn: 1101 1f<0f=0f>0 n128n64n32n16 n8n4n2n1 DB 0B,前のレジスタ命令で正または0のとき 11番地へジャンプします.(DDは≠) サブルーチン呼び出し CALL nn DF nn: 1101 1111 n128n64n32n16 n8n4n2n1 DF 07,7番地のプログラムを呼び出します. システム内サブルーチ ン呼び出し CALLI nn E1 nn: 1110 0001 n128n64n32n16 n8n4n2n1 *2E1 00,ROM内の0番地にある,組み込み プログラムを呼び出します. ノーオペレーション NOP F3: 1111 0011 F3,この行は何もしません レジスタとフラグ退避 PUSH_AF F6:1111 0110 レジスタAとフラグの値をスタックに退避しま す レジスタとフラグ復帰 POP_AF F7:1111 0111 スタックからレジスタAとフラグに値を戻しま す サブルーチン戻り RET F8: 1111 1000 F8,プログラムを呼び出した位置に戻ります. EEPROMへ戻り EXITROM F9: 1111 1001 F9,EEPROMのプログラムでは使用しません. 終わり END FF: 1111 1111 FF,プログラムの終了位置です.
9.
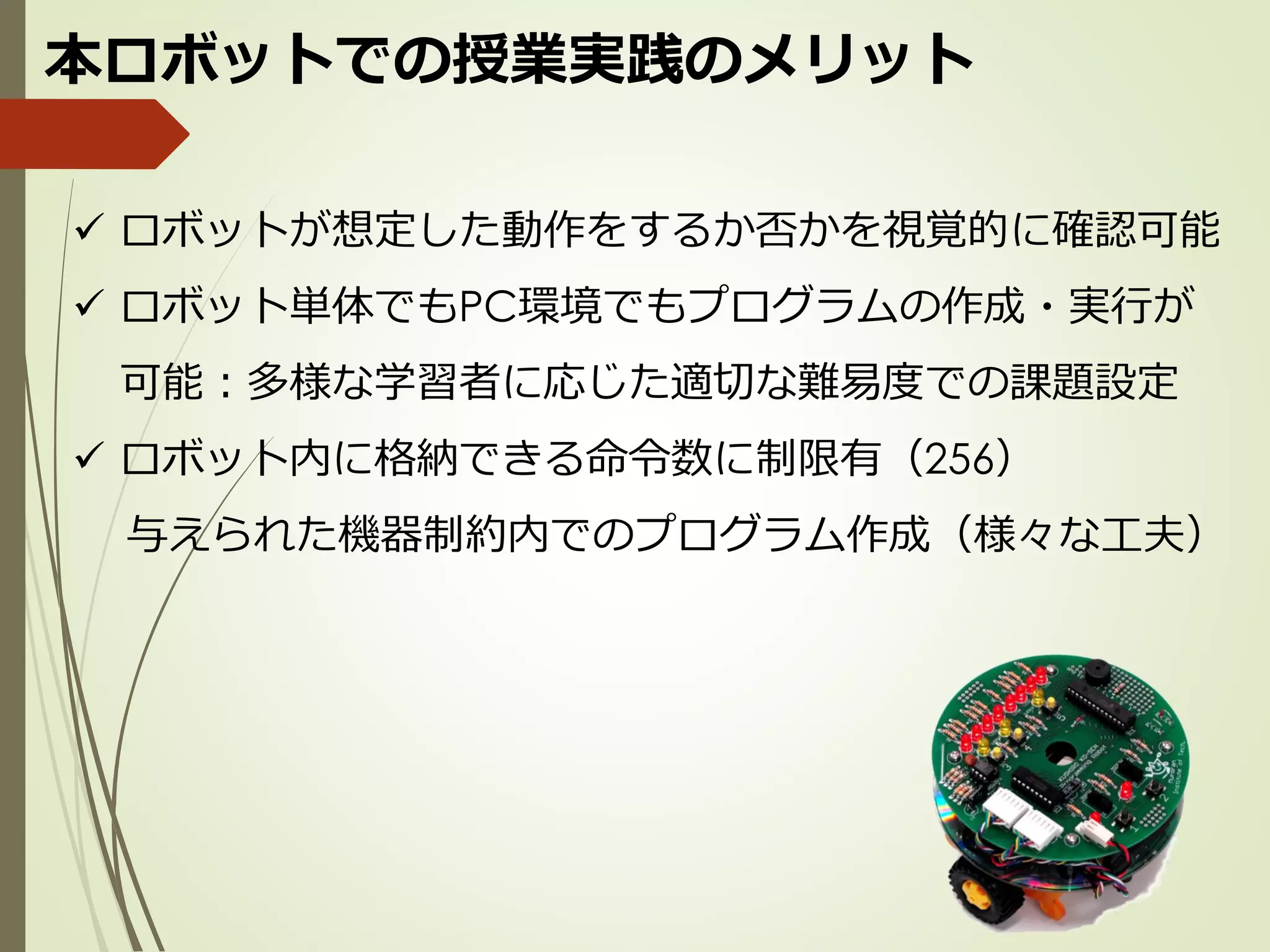
本ロボットでの授業実践のメリット ✓ ロボットが想定した動作をするか否かを視覚的に確認可能 ✓ ロボット単体でもPC環境でもプログラムの作成・実行が 可能:多様な学習者に応じた適切な難易度での課題設定 ✓
ロボット内に格納できる命令数に制限有(256) 与えられた機器制約内でのプログラム作成(様々な工夫)
10.
教育実践(オンライン併用)の概要 ✓ 大学1年生対象の共通科目(2単位15回),22~23名履修 概ね対面5-6回,オンライン9-10回 ✓ ロボットは対面終了回で自宅持ち帰り,その後はオンライン上で グループ活動(1グループ3名~4名) ✓
メンバーのロボットを用いた協調的な作品を企画し,最終的には 対面での発表会を実施 オンライン併用時のグループ企画におけるテーマ・制約条件等 ✓ 授業①:ダンス(必須要素:動き+音) ✓ 授業②:描画合成(必須要素:描画) • 各人がA2のクリアフォルダ内に描画し,重ね合わせる ✓ 授業③:ロボットとボールの連携動作 (必須要素:センサー利用+音)
11.
オンライン授業時での協調学習の工夫 ✓ オンライン授業時でのグループ学習 • ウェブ会議システムのブレイクアウトルームを使いグループメ ンバー間で相談(下図:授業②の例) •
親会議室は質問対応(わからないときに適宜相談) 完成作品例 チャットでのプログラ ムの共有
12.
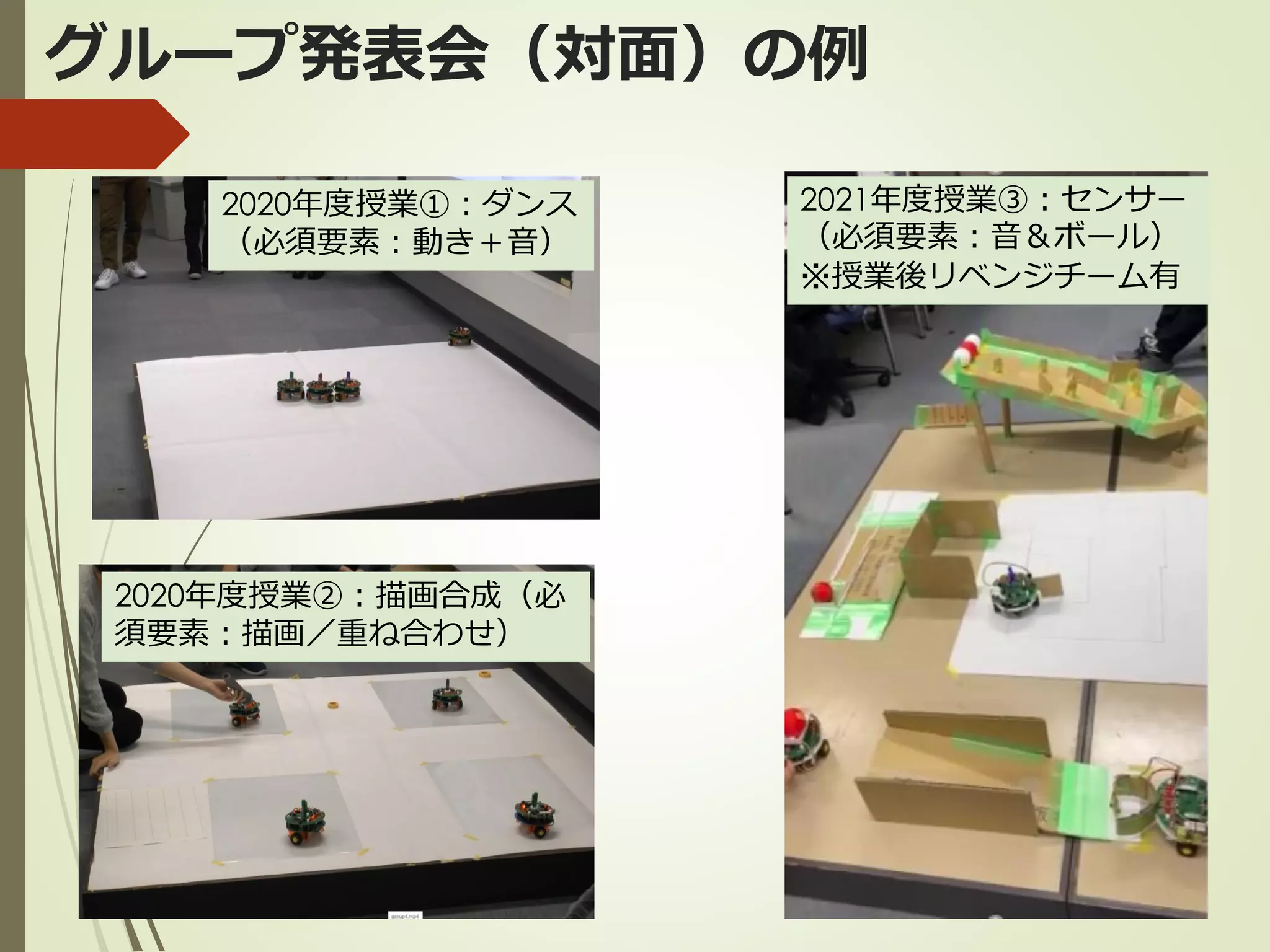
グループ発表会(対面)の例 2020年度授業①:ダンス (必須要素:動き+音) 2020年度授業②:描画合成(必 須要素:描画/重ね合わせ) 2021年度授業③:センサー (必須要素:音&ボール) ※授業後リベンジチーム有
13.
相互評価と振り返り(オンライン) 自身の実践を踏まえた有意義な質疑が進められた ➢ 授業①(2020年度) ➢ 発表時:Scratchでシミュレータ作成してチェックした旨 ➢
質問 :どのくらい、実際の描画とズレるか? ➢ 授業②(2020年度) 発表時に音楽が綺麗に綺麗に聞こえたグループに対し ➢ 質問:きちんと音が区切れていたが,どのような工夫をさ れたか? (自分ではできなかった)
14.
オンライン実践の効果:アンケート調査比較 ✓ アンケートへの回答 回答率:対面時は9割以上,オンライン時は8割~7割弱 ✓ アンケート内容 プログラミング経験,経験年数,ロボットに対する各種操作,実践に よる興味関心,等(選択式及び一部自由記述の感想あり) 以降,以下の結果を示す ✓
プログラムの入力と修正の難易度:ロボット単体 vs PC利用 ✓ オンラインと対面授業との結果比較 ロボット操作や興味 ・ 関心の結果 「強くそう思う」「そう思う」 「あまり思わない」「まったく思わない」 からの 4 択
15.
評価結果1 個人PCの利用 • ロボット単体では長いプログラム入力と修正は困難 •
開発した支援システムは問題なく利用でき,困難さの改善に役立つ プログラム 実行が簡単 プログラム入力の簡単さ ロボット単体 個人PC利用 肯定的 否定的 肯定的 肯定的 否定的 否定的 否定的 否定的 プログラム修正の簡単さ ロボット単体 個人PC利用 肯定的 肯定的
16.
評価結果2 プログラムの面白さ・興味等 選択肢/年度 18
19 20 授業① 20 授業② 21 授業② ロボットの動作を プログラムするこ とは面白いと思う 強くそう思う そう思う あまり思わない 全く思わない 10 6 1 0 5 14 0 0 9 9 1 0 6 7 2 0 13 6 0 0 プログラミングに 対する興味が増し たと思う 強くそう思う そう思う あまり思わない 全く思わない 10 7 0 0 3 14 2 0 7 12 0 0 7 5 3 0 10 8 1 0 もっと複雑なプロ グラムを作りたい と思う 強くそう思う そう思う あまり思わない 全く思わない 8 7 1 1 6 11 2 0 5 12 2 0 6 9 0 0 11 6 2 0 ✓ 殆どが肯定的な回答(9割以上) ✓ 対面時とほぼ同様の効果 対面 オンライン併用
17.
実践の効果まとめ オンライン併用型の協調学習実践について プログラミングロボットを用いたオンライン併用型の授業 で協調学習を実践し,学習状況を確認・評価した ✓ 学習者の持つPC環境で,ロボットとPCとの接続を実現 するために新たに開発したシステムが有効に利用できた ✓ グループ活動が,オンライン上でも問題なく実施できた ✓
ロボットへのプログラミングにより,プログラミングの 面白さや興味が増したとの肯定的回答を多数(約9割) 得た.これは対面授業時とほぼ同一の結果である
18.
今後の展開可能性 センサーを用いた協調学習の実践(2021後期) 反射型フォトインタラプタのセンサー:ロボットの 3つのボタンを押下することと同様の処理が可能 センサー検知を用いた条件分岐を組み合わせた作品 を課しており,協調学習による作品が展開可能性が 高まっている ロボットでは,マイクロコンピュータ上に作成した仮 想コンピュータのプログラムを書き換えることで制御 している。命令セットの検討などについて,学習者に 行わせる展開可能性も有しており,今後の検討として いる。
19.
参考:個人PCを用いた支援環境 (Pythonで開発) PC操作画面例(ロボットへのプログラム転送・ロボット内プログラム 確認等) 送信データ アセンブラを コード(16進表 現)に変換 機械語コードを 送信データに変換 ロボット内のデー タは,listボタン で表示可.本画面 の内容はコピー可 04 FOR 2 等と表記 アセンブリ言語を用いることも,機械語のコードを直接用いることも可能
20.
関連する JI7-IS LU 1303
コンピュータシステムのリテラシ コンピュータシステムに関する基本的知識(ハード、 ソフト、OS、プログラム言語、DB、ネット)を概 観させること
21.
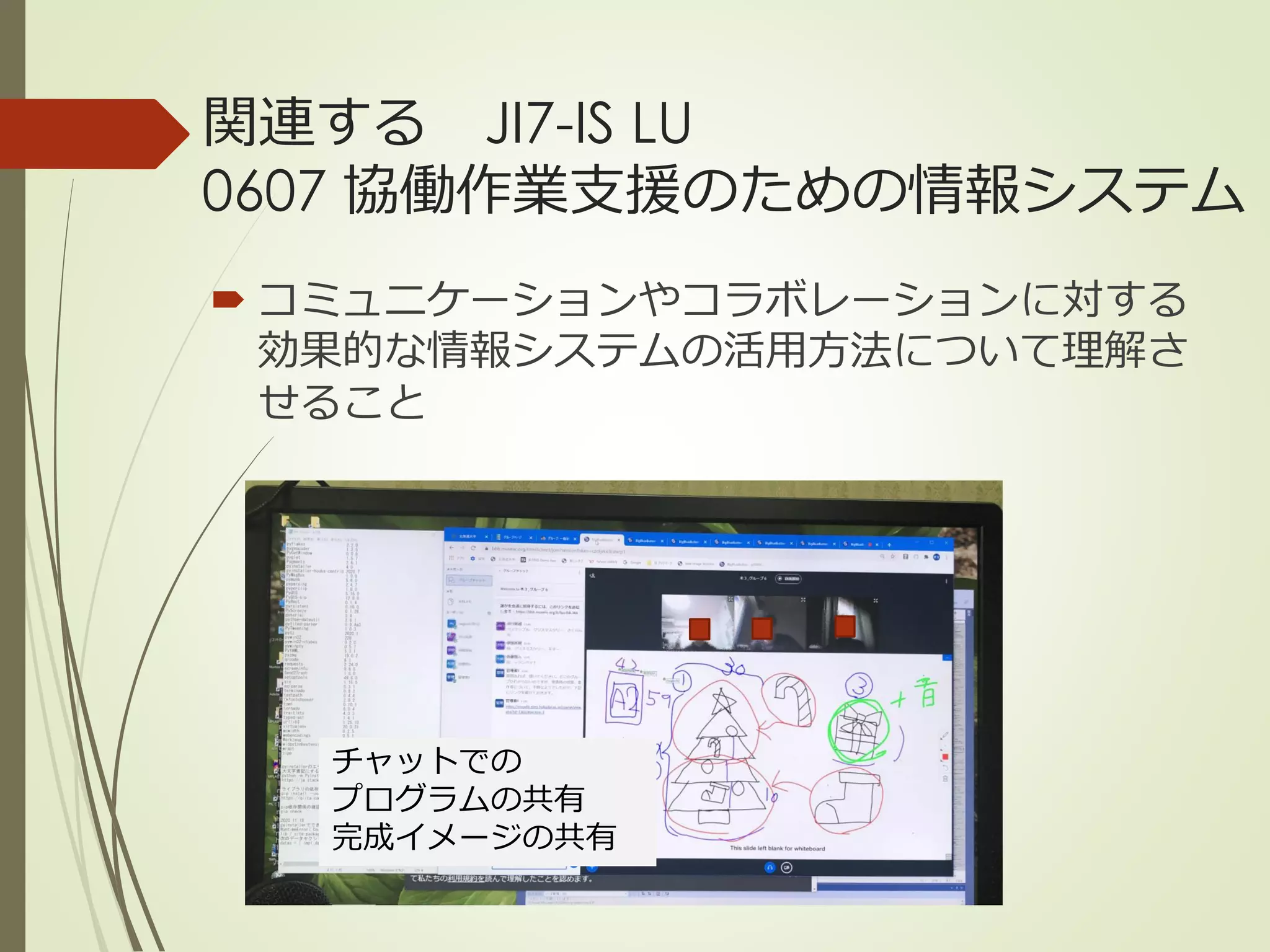
関連する JI7-IS LU 0607
協働作業支援のための情報システム コミュニケーションやコラボレーションに対する 効果的な情報システムの活用方法について理解さ せること チャットでのプログラ ムの共有 チャットでの プログラムの共有 完成イメージの共有
22.
関連する JI7-IS LU 0710
システム開発プロジェクトの管理 情報システム開発プロジェクトの特徴を理解させ、 プロジェクト管理の必要性について考察させるこ と。 【抜粋】あるグループの発表スライドから 実際に各々でロボットを動かして会議はしていた ものの、やはりグループ全体で合わせてみると上 手くいかない箇所がたくさん出てきてしまった為、 授業外の時間も活用し、もう少し早めに合わせる 機会を作るべきだった。
Download



















![[修士論文] 入力支援機能を備えた日本語表記による初学者向けプログラミング学習環境の構築](https://cdn.slidesharecdn.com/ss_thumbnails/random-130128012441-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[xDNCL] 配布資料](https://cdn.slidesharecdn.com/ss_thumbnails/pen-130127131150-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



![[CE81] プログラミング入門教育用学習環境PEN](https://cdn.slidesharecdn.com/ss_thumbnails/ce81-130128014313-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)