Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hirokazu Onomichi
896 views
新型コロナに負けず、ROSを活かしてロボットを完成させた話
ROS Japan UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://rosjp.connpass.com/event/197222/ にて、発表した内容です。
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 35
2
/ 35
3
/ 35
4
/ 35
5
/ 35
6
/ 35
7
/ 35
8
/ 35
9
/ 35
10
/ 35
11
/ 35
12
/ 35
13
/ 35
14
/ 35
15
/ 35
16
/ 35
17
/ 35
18
/ 35
19
/ 35
20
/ 35
21
/ 35
22
/ 35
23
/ 35
24
/ 35
25
/ 35
26
/ 35
27
/ 35
28
/ 35
29
/ 35
30
/ 35
31
/ 35
32
/ 35
33
/ 35
34
/ 35
35
/ 35
More Related Content
PDF
VRChatとシリアル通信、現実と仮想を結ぶ ~UdonとPythonによる仮想COMポートのつくり方~
by
Hirokazu Onomichi
PDF
だみとらの作り方 ~制作過程で気づいてしまったVRChat IKの残念な真実~
by
Hirokazu Onomichi
PDF
ROSでつながるVRChat
by
Hirokazu Onomichi
PDF
仮想のPremaidAIを、既存のロボット用ボードで動かしてみた話
by
Hirokazu Onomichi
PDF
Nuitrackを用いて自作ヒューマノイドを動かしてみた話
by
Hirokazu Onomichi
PDF
ROSを用いた天吊型スカラロボットの共同製作
by
Hirokazu Onomichi
PDF
ROSConJP2019とWMD2019の出張報告!
by
Hirokazu Onomichi
PDF
瀬戸内ROS勉強会の紹介~地方でROSを勉強するコツ~
by
Hirokazu Onomichi
VRChatとシリアル通信、現実と仮想を結ぶ ~UdonとPythonによる仮想COMポートのつくり方~
by
Hirokazu Onomichi
だみとらの作り方 ~制作過程で気づいてしまったVRChat IKの残念な真実~
by
Hirokazu Onomichi
ROSでつながるVRChat
by
Hirokazu Onomichi
仮想のPremaidAIを、既存のロボット用ボードで動かしてみた話
by
Hirokazu Onomichi
Nuitrackを用いて自作ヒューマノイドを動かしてみた話
by
Hirokazu Onomichi
ROSを用いた天吊型スカラロボットの共同製作
by
Hirokazu Onomichi
ROSConJP2019とWMD2019の出張報告!
by
Hirokazu Onomichi
瀬戸内ROS勉強会の紹介~地方でROSを勉強するコツ~
by
Hirokazu Onomichi
Recently uploaded
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
PDF
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
PDF
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
Featured
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing
by
Search Engine Journal
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process
by
Chiara Aliotta
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
by
OECD Directorate for Financial and Enterprise Affairs
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
by
SocialHRCamp
PDF
2024 State of Marketing Report – by Hubspot
by
Marius Sescu
PDF
Everything You Need To Know About ChatGPT
by
Expeed Software
PDF
Product Design Trends in 2024 | Teenage Engineerings
by
Pixeldarts
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health
by
ThinkNow
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
by
marketingartwork
PDF
Skeleton Culture Code
by
Skeleton Technologies
PDF
PEPSICO Presentation to CAGNY Conference Feb 2024
by
Neil Kimberley
PDF
Content Methodology: A Best Practices Report (Webinar)
by
contently
PPTX
How to Prepare For a Successful Job Search for 2024
by
Albert Qian
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights
by
Kurio // The Social Media Age(ncy)
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024
by
Search Engine Journal
PDF
5 Public speaking tips from TED - Visualized summary
by
SpeakerHub
PDF
ChatGPT and the Future of Work - Clark Boyd
by
Clark Boyd
PDF
Getting into the tech field. what next
by
Tessa Mero
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent
by
Lily Ray
PDF
How to have difficult conversations
by
Rajiv Jayarajah, MAppComm, ACC
2024 Trend Updates: What Really Works In SEO & Content Marketing
by
Search Engine Journal
Storytelling For The Web: Integrate Storytelling in your Design Process
by
Chiara Aliotta
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
by
OECD Directorate for Financial and Enterprise Affairs
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
by
SocialHRCamp
2024 State of Marketing Report – by Hubspot
by
Marius Sescu
Everything You Need To Know About ChatGPT
by
Expeed Software
Product Design Trends in 2024 | Teenage Engineerings
by
Pixeldarts
How Race, Age and Gender Shape Attitudes Towards Mental Health
by
ThinkNow
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
by
marketingartwork
Skeleton Culture Code
by
Skeleton Technologies
PEPSICO Presentation to CAGNY Conference Feb 2024
by
Neil Kimberley
Content Methodology: A Best Practices Report (Webinar)
by
contently
How to Prepare For a Successful Job Search for 2024
by
Albert Qian
Social Media Marketing Trends 2024 // The Global Indie Insights
by
Kurio // The Social Media Age(ncy)
Trends In Paid Search: Navigating The Digital Landscape In 2024
by
Search Engine Journal
5 Public speaking tips from TED - Visualized summary
by
SpeakerHub
ChatGPT and the Future of Work - Clark Boyd
by
Clark Boyd
Getting into the tech field. what next
by
Tessa Mero
Google's Just Not That Into You: Understanding Core Updates & Search Intent
by
Lily Ray
How to have difficult conversations
by
Rajiv Jayarajah, MAppComm, ACC
新型コロナに負けず、ROSを活かしてロボットを完成させた話
1.
2020/05/01 ROS Japan
UG #36 LT大会 online 瀬戸内ROS勉強会
2.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ Onomichi Hirokazu ( Micchy ) @Dream_Drive 本業は医療関連のソフトウェア導入・開発の一人部署 テイルウェイ・ソフトウェア メイカー系イベントやロボコンをうろうろ 社会人ロボコニスト (ROBO-ONE) DreamDrive!! (個人サークル) ROSCon JP2018からボチボチROSを使い始める 2019 瀬戸内ROS勉強会 発足 自己紹介
3.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
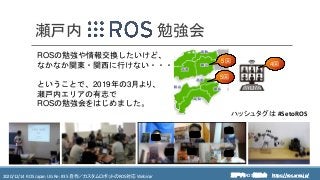
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 勉強会瀬戸内 ROSの勉強や情報交換したいけど、 なかなか関東・関西に行けない・・・ ということで、2019年の3月より、 瀬戸内エリアの有志で ROSの勉強会をはじめました。 5回 5回 ハッシュタグは #SetoROS 4回 オンラインの様子
4.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ビーズならべロボットを 天吊式のスカラロボットで再設計し、 ROSで制御しよう! 瀬戸内の電気電子工作系製作・交流会 “えれくら” 自動アイロンビーズ並べ機「アイロンビーズセッター」 瀬戸内ROS勉強会 共通課題 ROSを使って、 スカラロボットでアイロンビーズを並べる
5.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
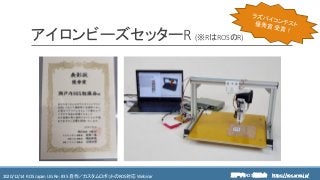
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ アイロンビーズセッターR (※RはROSのR)
6.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
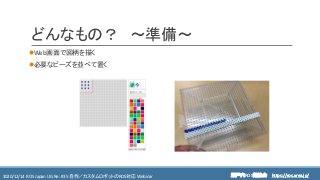
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ どんなもの? ~準備~ ⚫Web画面で図柄を描く ⚫必要なビーズを並べて置く
7.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 出来上がり!
8.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
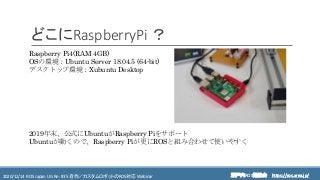
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ どこにRaspberryPi ? Raspberry Pi4(RAM 4GB) OSの環境:Ubuntu Server 18.04.5 (64-bit) デスクトップ環境:Xubuntu Desktop 2019年末、公式にUbuntuがRaspberry Piをサポート Ubuntuが動くので、Raspberry Piが更にROSと組み合わせて使いやすく
9.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ロボットの構成
10.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ロボットの構成 アームの位置制御はDynamixel XL430-W250-Tにおまかせ。 360deg/12bitの位置決め精度。 dynamixel_workbench_controllers (ROSパッケージ) https://github.com/ROBOTIS-GIT/dynamixel-workbench/
11.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ROSの活用 状態の表示にRVIZ、MoveITでの軌道生成も利用可能 今回は、軸数が少ないのでIKは自前で実装 (少ない軸数はMoveITは苦手)
12.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ どうやってビーズをつかむの? 長さ:約4.8mm 外形:約5mm 内径:約2.8mm 2 Target
13.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ どうやってビーズをつかむの? 唐突に、シャーペンのしくみを説明してみる 日本筆記具工業会 [ http://www.jwima.org/sharp-pencil/03-1sharp-pencil/03-1sharp-pencil.html ]より引用
14.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
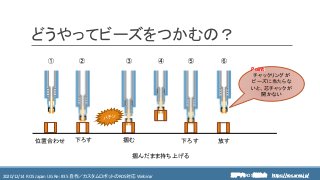
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ どうやってビーズをつかむの? チャックリングが ビーズに当たらな いと、芯チャックが 開かない PointPoint ① ② ③ ④ ⑤ ⑥ 下ろす 掴む 掴んだまま持ち上げる 下ろす 放す位置合わせ
15.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ どうやってビーズをつかむの? シャーペンのノック シャーペンの上下シャーペンの上下
16.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
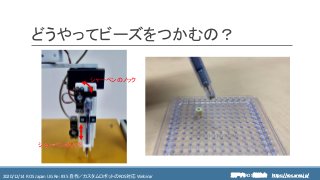
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ エンドエフェクタの実装 背面に取り付けられたArduino UNOで制御 (rosserialは使わない/通信部分も自作) Raspberry Piからは「掴め」「離せ」という命令を送るだけで、アイロンビーズを操作可能
17.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ エンドエフェクタの実装 アーム設計の工夫点 シャープペンシルを利用したエンドエフェクタの反対側にArduino UNOが取り付け ロボットのアーム駆動部を中心として、Arduino UNOとエンドエフェクタがそれぞれカウンターウェイトの役割を果たす
18.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
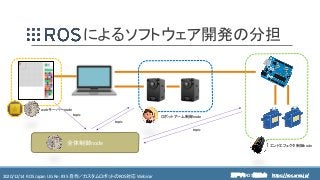
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ によるソフトウェア開発の分担 全体制御node webサーバーnode ロボットアーム制御node エンドエフェクタ制御node topic topic topic
19.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
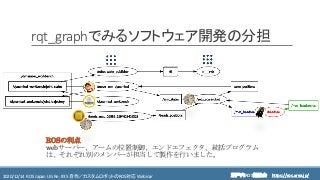
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ rqt_graphでみるソフトウェア開発の分担 ROSの利点 webサーバー、アームの位置制御、エンドエフェクタ、統括プログラム は、それぞれ別のメンバーが担当して製作を行いました。
20.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
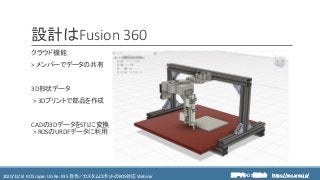
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 設計はFusion 360 クラウド機能 > メンバーでデータの共有 3D形状データ > 3Dプリントで部品を作成 CADの3DデータをSTLに変換 > ROSのURDFデータに利用
21.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
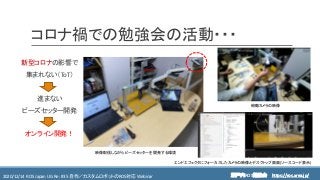
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ コロナ禍での勉強会の活動・・・ 新型コロナの影響で 集まれない(ToT) 進まない ビーズセッター開発 オンライン開発! 映像配信しながらビーズセッターを開発する環境 俯瞰カメラの映像 エンドエフェクタにフォーカスしたカメラの映像とデスクトップ画面(ソースコード表示)
22.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
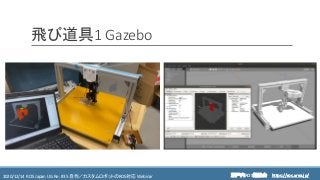
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 飛び道具1 Gazebo オンライン開発で効果を発揮!
23.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 飛び道具1 Gazebo
24.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 飛び道具2 3Dプリンタ
25.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
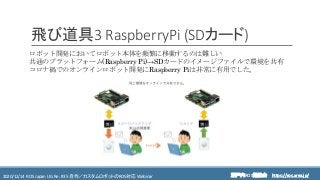
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 飛び道具3 RaspberryPi (SDカード) ロボット開発においてロボット本体を頻繁に移動するのは難しい 共通のプラットフォーム(Raspberry Pi)→SDカードのイメージファイルで環境を共有 コロナ禍でのオンラインロボット開発にRaspberry Piは非常に有用でした。
26.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
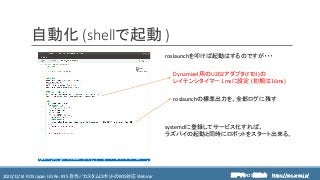
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 自動化 (shellで起動 ) Dynamixel用のU2D2アダプタ(FTDI)の レイテンシタイマー 1msに設定 (初期は16ms) roslaunchの標準出力を、全部ログに残す systemdに登録してサービス化すれば、 ラズパイの起動と同時にロボットをスタート出来る。 roslaunchを叩けば起動はするのですが・・・
27.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
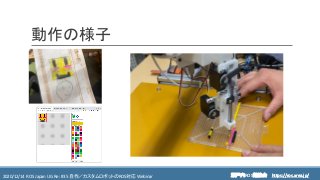
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 動作の様子
28.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 当初のゴール ③大型化 当初の設計はΦ120cmの作業範囲 剛性のあるアームに ①画像認識で、ビーズプレートの位置を自動認識 ②適当なビーズを詰めて、色識別し、自動フィード
29.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ まとめ・これから ◦ ビーズセッター ◦ ROS2へのポーティング作業 ◦ 当初のゴールに近づける ◦ (カメラ認識/ビーズフィード・カラー検出) ◦ 移動ロボット、SLAM等の研究 ◦ 多足ロボット withコロナで、どういった活動が出来るか、模索中・・・ とりあえず・・・ オンラインで祝賀会やるよ! (12/20(日) 20:00~) Webexにて(詳細は、ROS JP Slack #setoチャンネルで) 「作ってみたネタ募集中です。」
30.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
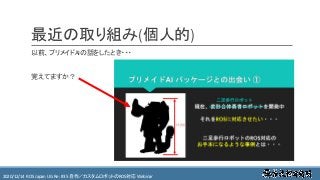
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 最近の取り組み(個人的) 以前、プリメイドAIの話をしたとき・・・ 覚えてますか?
31.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ オープンソース 勇者ロボット 計画
32.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
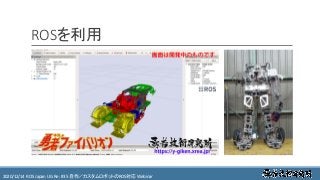
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ROSを利用
33.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ 胸像 (MakerFaireTokyo2020出展)
34.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ビーズセッターと同じ技術 (笑) Dynamixel Workbench + OpenCV Apps + joy node 展示日前日深夜、Raspberry Pi の SDカードイメージを送ってなんとか間に合わせた(^^;A
35.
https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan
UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/ ご清聴ありがとうございました。 瀬戸内 ROS 勉強会 - https://ros.xrea.jp 勇者技術研究所 - https://y-giken.xrea.jp
Download






![https://ros.xrea.jp/瀬戸内ROS勉強会2020/12/14 ROS Japan UG Re: #35 自作/カスタムロボットのROS対応 Webinar https://ros.xrea.jp/
どうやってビーズをつかむの?
唐突に、シャーペンのしくみを説明してみる
日本筆記具工業会 [ http://www.jwima.org/sharp-pencil/03-1sharp-pencil/03-1sharp-pencil.html ]より引用](https://image.slidesharecdn.com/20201214seto-201214133009/85/ROS-13-320.jpg?cb=1607952649)