Download as PDF, PPTX




![SysML: req [Core requirements]](https://image.slidesharecdn.com/omg-astahgsn-20131211w-131212200357-phpapp02/85/OMG-Astah-GSN-Demonstration-13-320.jpg)
![SysML: req [Robot requirements]](https://image.slidesharecdn.com/omg-astahgsn-20131211w-131212200357-phpapp02/85/OMG-Astah-GSN-Demonstration-14-320.jpg)
![SysML: req [Controller requirements]](https://image.slidesharecdn.com/omg-astahgsn-20131211w-131212200357-phpapp02/85/OMG-Astah-GSN-Demonstration-15-320.jpg)
![SysML: bdd [Context diagram]](https://image.slidesharecdn.com/omg-astahgsn-20131211w-131212200357-phpapp02/85/OMG-Astah-GSN-Demonstration-16-320.jpg)
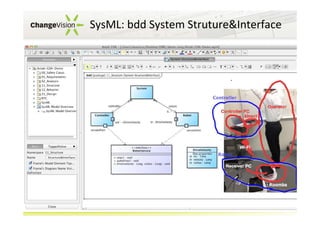
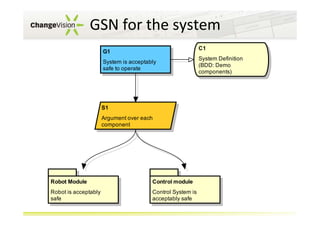
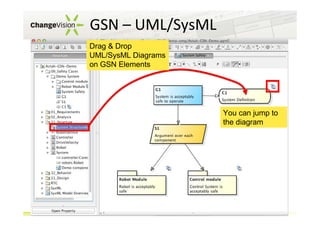
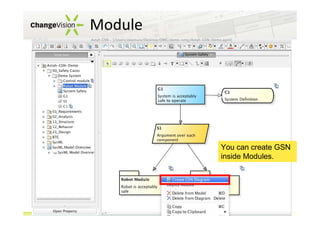
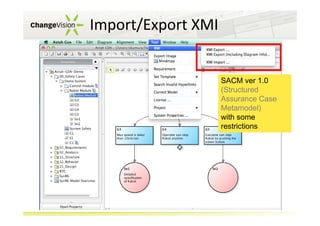

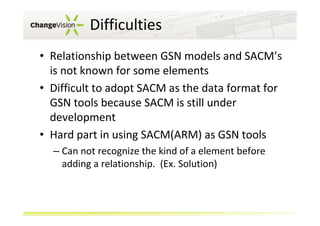
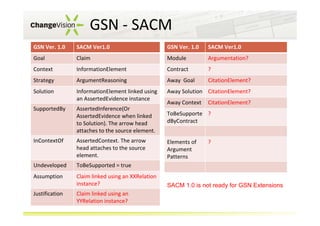
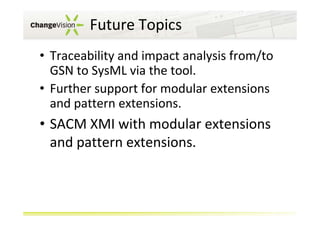


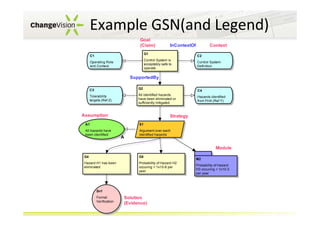
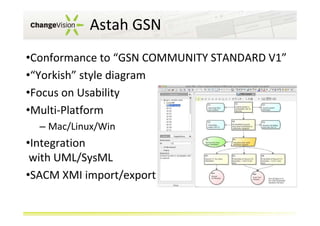
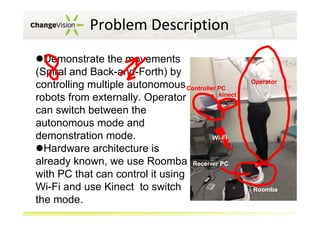
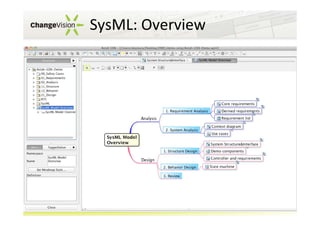
The document presents a demonstration of a new tool integrating GSN (Goal Structuring Notation) with UML/SysML for assurance case modeling developed by Change Vision, Inc. It highlights the usability of the tool, which supports multi-platform integration and aims to enhance the effectiveness of assurance case modeling. Challenges related to the adoption of SACM (Structured Assurance Case Metamodel) and future development topics, including traceability and modular support, are also discussed.