
Recommended
Recommended
More Related Content
Similar to Sistemi elettromeccanici (1)
Recently uploaded
Recently uploaded (7)
Sistemi elettromeccanici (1)
- 1. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 1 di 18 CAPITOLO 1 - SISTEMI ELETTROMECCANICI 1.1 INTRODUZIONE Lo scopo del presente capitolo è di riconoscere le proprietà fondamentali dei sistemi dinamici, con particolare attenzione ai sistemi elettromeccanici. Ciò allo scopo di impostare correttamente i modelli dei sistemi considerati. Si puntualizzano alcune nozioni fondamentali, che dovrebbero comunque essere già state assimilate da insegnamenti precedenti. Allo scopo di inquadrare quanto si dirà in una visione più generale, si ridiscute dapprima brevemente il concetto di modello, in seguito si richiamano alcuni elementi di teoria dei sistemi dinamici. Modelli e realtà Per modello in senso stretto si intende, nella presente trattazione, una formulazione matematica del comportamento di un determinato oggetto od ente 'fisico' o, con espressione molto generica, sistema. Da osservare che nella maggioranza dei casi si ha in mente, in modo più o meno preciso, una realtà 'fisica' che si vuole modellizzare, in maniera da avere un problema dominabile. Ma la stessa realtà 'fisica' è presente nella nostra mente come qualcosa di complesso che deve rispondere comunque alle leggi fisiche fondamentali: cioè è già essa stessa un modello (in senso lato). E' comune in effetti, e probabilmente inevitabile, ragionare per diversi livelli di modellizzazione; il modello che ci si propone di formalizzare è, di regola, la riduzione all'essenziale, ai fini di ciò che interessa, del comportamento immaginato di un modello più generale. Un modello può essere statico o dinamico. Un modello statico è costituito da relazioni algebriche tra grandezze, ad es. una rete di resistenze o le relazioni di regime di una macchina elettrica. Un modello dinamico vuole riprodurre il movimento nel tempo di un sistema, pertanto è caratterizzato dalla proprietà di evolvere nel tempo. I modelli dinamici si suddividono in due importanti categorie: i modelli a tempo continuo (modelli continui), in cui il tempo è una variabile continua, ed i modelli a tempo discreto (modelli discreti), in cui il tempo assume valori discreti, usualmente, ma non necessariamente, determinati da incrementi costanti. I modelli continui sono costituiti di norma da sistemi di equazioni differenziali. I modelli (statici e dinamici) si distinguono anche in modelli a dimensione finita (detti anche a parametri concentrati) e a dimensione infinita (o a parametri distribuiti). I modelli a dimensione finita forniscono come risultato un numero finito di grandezze (per i modelli dinamici ad ogni istante di tempo). I modelli a dimensione infinita forniscono come risultato una o più funzioni continue (per i modelli dinamici anche variabili nel tempo). Esempi di modelli a dimensione infinita sono le analisi di campi (elettrico, magnetico, di temperatura, ecc.) condotte, ad es., con metodi analitici. La discretizzazione del campo (metodi alle differenze finite, ecc.) dà luogo a modelli a dimensione finita.
- 2. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 2 di 18 Le suddivisioni citate riguardano sempre i modelli, non la realtà. E' regola che un oggetto fisico possa essere considerato sotto diversi punti di vista, quindi dare luogo a numerosi modelli anche molto differenti tra loro. I modelli matematici sono risultati di nostre scelte e non vanno considerati in modo rigido. Un modello dinamico nel continuo, ad es., se valutato all'equilibrio dà luogo alla soluzione di regime del sistema, quindi a un modello stazionario. Lo stesso modello dinamico, se risolto ripetutamente per intervalli di tempo costanti e considerate le grandezze solo alla fine di ogni intervallo, può essere visto come un modello a tempo discreto. Inoltre, come accennato, un modello a dimensione infinita può essere discretizzato in un modello finito, con precisione limitata solo dal numero di discretizzazioni. 1.2 SISTEMI DINAMICI Per chiarezza di terminologia, nell'uso corrente la dizione 'sistema dinamico' indica un oggetto o un insieme in movimento (o in evoluzione) e soggetto ad interazioni all'interno del sistema stesso e con il mondo esterno. La stessa dizione indica anche, più spesso, una schematizzazione concettuale dell'oggetto o dell'insieme, quindi già un modello in senso lato. Nella presente trattazione il termine ‘sistema’ sarà usato in questa accezione. Nel seguito si considerano principalmente sistemi dinamici continui a dimensione finita. Per definire un sistema dinamico è innanzitutto necessario delineare il contorno del sistema stesso, cioè stabilire ciò che fa parte del sistema. E' importante riconoscere che il limite del sistema è fondamentalmente una scelta di comodo, suggerita di solito dallo scopo dell'analisi e dalla maggiore o minore facilità di costituzione del modello. E' tipica la suddivisione di sistemi complessi in sottosistemi tra loro interagenti e più facili da trattare singolarmente. Delimitato il sistema, questo va caratterizzato dall’ingresso, lo stato, l’uscita. L’ingresso del sistema è costituito dall’insieme delle variabili imposte dall'esterno (variabili di ingresso o ‘ingressi’) che influenzano il sistema stesso. Anche per gli ingressi sussistono arbitrarietà di scelta. Ad es. se una grandezza esterna può essere considerata costante, anziché ingresso può diventare un parametro del sistema. Lo stato del sistema è ciò che ne determina la 'memoria'. Più precisamente, noto lo stato all'istante generico t0 e l'andamento nel tempo di tutti gli ingressi nell'intervallo generico t0-t1 (t1>t0), è univocamente determinato il movimento del sistema nell'intervallo t0-t1. L'affermazione precedente, considerati tutti i possibili andamenti degli ingressi nell'intervallo considerato, definisce operativamente lo stato del sistema. Nel modello del sistema lo stato è definito dall'insieme dei valori di un numero (minimo) N di variabili interne indipendenti, chiamate variabili di stato (v. di s.). Sussistono le proprietà che: - due situazioni caratterizzate dallo stesso insieme di valori iniziali di v. di s., a parità di ingressi, sono indistinguibili; in caso contrario l'insieme considerato di variabili non è completo (quindi non costituiscono un valido insieme di v. di s.). - se due situazioni sono indistinguibili per qualsiasi ingresso e lo stato iniziale risulta diverso, allora l'insieme delle variabili interne non è un insieme di v. di s. (ad es. non è minimo). L'insieme delle variabili di stato non è unico. Dato un insieme di N variabili di stato, un qualsiasi insieme di N variabili indipendenti in corrispondenza biunivoca con le precedenti costituisce un altro valido insieme di variabili di stato. Caso particolare importante è una trasformazione lineare tra vecchie e nuove variabili di stato, in tal caso la matrice di trasformazione è di ordine N e invertibile.
- 3. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 3 di 18 Il numero N di variabili di stato è un invariante del sistema dinamico considerato e costituisce l'ordine del sistema. Ogni possibile scelta dell'insieme di variabili di stato dà luogo a un diverso modello dinamico. Le variabili di stato possono essere continue o a valori discreti, i due tipi possono essere presenti contemporaneamente in un sistema. Ad es. nei sistemi con valvole ideali lo stato di una valvola costituisce una variabile di stato a due valori (conduzione e blocco). Infine l’uscita è costituita dall’insieme delle grandezze che interessa evidenziare come risultati o che sono rilevabili (variabili di uscita del sistema o ‘uscite’). In sistemi interconnessi alcune uscite di un sistema forniscono gli ingressi di altri sistemi. Le uscite sono funzioni algebriche dello stato e degli ingressi. Sistemi in cui le uscite sono funzioni solo dello stato sono chiamati sistemi propri, in caso contrario impropri. La formulazione dei modelli dinamici in termini di variabili di stato può ignorare inizialmente le uscite, perciò in molti casi non si richiede, almeno inizialmente, di dovere specificare le uscite richieste dal sistema. E' comodo spesso fare coincidere le uscite per generalità con le variabili di stato: le ulteriori relazioni di uscita richieste possono essere considerate in seguito e fuori dal sistema. A questo punto possiamo precisare meglio la terminologia: chiamiamo 'sistema dinamico' una schematizzazione formale caratterizzata dai contorni del sistema, dagli ingressi e dallo stato (in forma astratta) di dimensione N. 'Modello dinamico' è invece l'insieme delle relazioni matematiche costitutive, nelle quali appare, per esplicita scelta, un particolare insieme di v. di s., di ingresso e (a rigore) di uscita. Esistono anche modelli che non ricorrono esplicitamente alla nozione di stato. Ne sono esempi le formulazioni che esprimono direttamente relazioni tra ingressi ed uscite; a questa categoria appartengono le funzioni di trasferimento. SISTEMI DINAMICI IN FORMA NORMALE I modelli dinamici continui e a variabili di stato continue sono costituiti da sistemi di relazioni integro-differenziali in generale non lineari tra variabili di stato ed ingressi (le uscite sono considerate a parte). Quando il sistema ha la struttura di N equazioni differenziali del primo ordine risolte rispetto alla derivata prima e sotto ogni derivazione appare una diversa variabile di stato, il modello (o sistema) dinamico è detto in forma normale. In tal modo ogni derivata di variabile di stato è espressa come funzione esplicita dell'insieme delle variabili di stato e degli ingressi. In formule, detto N l'ordine del sistema, x il vettore delle variabili di stato ed u il vettore degli ingressi, il sistema in forma normale è1 d dt x f x u= ( , ) (1.1) dove f è un vettore di N funzioni. Alla relazione (1.1) va sempre associata, esplicitamente od implicitamente, la relazione che fornisce il vettore delle uscite in funzione, in generale, degli stati e degli ingressi. )( ux,yy = (1.2) 1 I simboli in carattere grassetto indicano matrici o vettori.
- 4. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 4 di 18 Se tra gli ingressi della (1.1) appare esplicitamente il tempo, il sistema si chiama tempo- variante. Per indicare la tempo-varianza si può scrivere: d dt t x f x u= ( , , ) (1.3) Stato di equilibrio Un sistema dinamico (1.1) è in uno stato di equilibrio se, soggetto a ingresso opportuno, permane indefinitamente in questo stato. Uno stato di equilibrio soddisfa alla condizione: f x u( , ) = 0 (1.4) dove si sono indicati con x ,u lo stato di equilibrio e l'ingresso di equilibrio (quasi sempre costante). Sistema lineare Un modello dinamico lineare in forma normale è costituito dalle relazioni BuFx x += dt d (1.5) y D x D uX U= + (1.6) dove F è una matrice di coefficienti quadrata di ordine N, detta matrice di stato, B è una matrice rettangolare di coefficienti detta matrice di ingresso, UX DD sono le matrici (rettangolari) delle uscite. F è invertibile per la indipendenza delle variabili di stato. Quando gli ingressi sono assenti (B=0, 0=UD ) il sistema si dice autonomo. Per 0=UD l’uscita non dipende direttamente dall’ingresso. In tal caso il sistema viene detto proprio. Se le matrici F e B sono costanti il sistema si dice tempo-invariante, o a parametri costanti2 . In caso contrario il sistema è lineare tempo-variante. Per evidenziare questa ultima situazione è opportuno indicare: uBxF x )()( tt dt d += (1.7) Osservazioni: se esistono istanti per i quali F(t) non è invertibile, in tali istanti il sistema diventa degenere; il sistema lineare tempo-variante (1.7) può anche considerarsi genericamente non lineare. E' noto che i sistemi lineari possiedono la fondamentale proprietà di sovrapposizione. Per sistemi dinamici l'affermazione è valida pur di considerare anche lo stato iniziale. Tale fatto si 2 In realtà è determinante la tempo-invarianza nello stato, cioè la costanza della matrice di stato F. Infatti un sistema tempo-variante nella sola B ritorna tempo-invariante con una riformulazione degli ingressi.
- 5. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 5 di 18 enuncia nella seguente forma. Dato un sistema dinamico lineare, il movimento dallo stato iniziale x01 e con ingressi u1(t) sia x1(t). Parimenti il movimento dallo stato iniziale x02 e con ingressi u2(t) sia x2(t). Allora la proprietà di sovrapposizione afferma che, dato lo stato iniziale x0=x01+x02 e gli ingressi u(t)=u1(t)+u2(t), il movimento risulta x(t)=x1(t)+x2(t). Nel caso di sistemi lineari tempo-varianti a quanto sopra va aggiunto il vincolo che l'istante iniziale delle evoluzioni deve essere il medesimo. In altre parole le evoluzioni da comporre devono essere contemporanee. La sovrapposizione dà un significato preciso allo stato nullo e agli ingressi nulli per sistemi lineari: sono rispettivamente lo stato e l'insieme degli ingressi invarianti rispetto alla sovrapposizione. Stabilità e autovalori La stabilità dell'equilibrio per sistemi lineari a parametri costanti dipende esclusivamente dalla matrice di stato. Si esaminano le radici della seguente equazione algebrica nella variabile di comodo λ (chiamata equazione caratteristica della matrice F): 0)det( =−λ F1 (1.8) Le radici di questa equazione prendono il nome di autovalori della matrice di stato F. Gli autovalori di una matrice reale, radici di una equazione algebrica lineare di grado N a coefficienti reali, sono N valori, distinti o in parte coincidenti, reali o a coppie complessi coniugati. Il sistema è stabile asintoticamente se tutti gli autovalori sono a parte reale negativa, è stabile se tutti gli autovalori sono a parte reale non positiva. Come si vede la stabilità per sistemi lineari a parametri costanti non dipende dagli ingressi, quindi è una caratteristica del sistema. Frequenze naturali Gli autovalori della matrice di stato costituiscono le frequenze naturali (o frequenze proprie) del sistema che, per come sono state ricavate, non dipendono né dagli ingressi né dalle condizioni iniziali. Proprietà degli autovalori di una matrice reale - Gli autovalori di una matrice semidefinita negativa3 sono a parte reale non positiva (sistema stabile). - Gli autovalori di una matrice definita negativa sono a parte reale negativa (sistema asintoticamente stabile). - Gli autovalori di una matrice diagonale coincidono con i termini della diagonale. - Gli autovalori di un matrice simmetrica sono tutti reali. - Gli autovalori di un matrice emisimmetrica sono tutti immaginari (o nulli). 3 Una matrice F è semidefinita negativa o definita negativa se –F è, rispettivamente, semidefinita positiva o definita positiva.
- 6. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 6 di 18 Linearizzazione Un sistema non lineare (1.1) può essere reso lineare alle piccole variazioni intorno ad un punto di equilibrio con la trasformazione nel sistema lineare a parametri costanti, detto sistema linearizzato del sistema (1.1) intorno allo stato di equilibrio (1.4): d dt $ ( , ) $ ( , ) $ x f x u x x f x u u u= + ∂ ∂ ∂ ∂ (1.9) dove i simboli uuu,xxx −=−= ˆˆ indicano gli incrementi delle v. di s. e degli ingressi rispetto ai valori (necessariamente costanti) di linearizzazione. La stabilità di uno stato di equilibrio di sistemi non lineari può essere determinata in piccolo (cioè per piccole perturbazioni) per mezzo del sistema linearizzato intorno al punto di equilibrio. Lo stato di equilibrio è stabile asintoticamente se lo è il sistema linearizzato, instabile se lo è il sistema linearizzato. Nel caso di sistema linearizzato stabile non asintoticamente, nulla si può dire sulla stabilità dell'equilibrio del sistema non lineare. Poiché la matrice di stato linearizzata dipende dallo stato e dall'ingresso di equilibrio, la stabilità o meno è una caratteristica del particolare stato di equilibrio. Stato e variabili di stato Lo stato di un sistema dinamico (lineare o non lineare) è rappresentabile in alternativa da infiniti insiemi di variabili di stato. Infatti, dato un vettore x (di N elementi) di v. di s. e una matrice costante non degenere P di ordine NxN, il vettore z (di N elementi) determinato dalla Pxz = è un altro valido insieme di v. di s. del sistema dato. Limitandoci a sistemi lineari, il sistema (1.5) si trasforma in tal caso nel uBzF z '' += dt d (1.10) uDxDy UX '' += con 1− = PFPF' PBB' = 1 ' − = PDD XX UDD U =' E’ importante riconoscere che gli autovalori della nuova matrice di stato F’ sono gli stessi della matrice F del sistema originario. Infatti )det(det)det(det ])'(det[)det()det()'det( 1 1111 F1PF1P PF1PPFPPPPFP1F1 −λ=⋅−λ⋅= =−λ=−λ=−λ=−λ − −−−− Le due matrici F e F’ hanno quindi la stessa equazione caratteristica e gli stessi autovalori. Matrici che presentano gli stessi autovalori sono dette simili. Gli autovalori sono quindi una caratteristica del sistema lineare indipendentemente dalla scelta delle variabili di stato. Pertanto sono conservate le caratteristiche fondamentali della dinamica e la stabilità dell’equilibrio.
- 7. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 7 di 18 Soluzione dei sistemi dinamici lineari Per soluzione di un sistema dinamico si intende la integrazione della (1.5), che determina l’evoluzione nel tempo, in un dato intervallo di tempo, delle variabili di stato del sistema. Infatti dagli andamenti di queste e dagli ingressi sono determinabili le uscite (1.2). Per la determinazione della soluzione da un istante iniziale t0 in poi, è necessario conoscere gli ingressi in funzione del tempo dall’istante t0 in avanti ed i valori x0 delle v. di s. all’istante iniziale t0. Da notare che l’evoluzione del sistema trasformato (1.10) è equivalente al sistema (1.5) se si considerano i valori iniziali del sistema trasformato 00 Pxz = (1.11) Alla soluzione si può pervenire mediante la matrice esponenziale o per via diretta. Matrice esponenziale La soluzione del sistema lineare invariante (1.5), note le condizioni iniziali x0 all’istante iniziale t0 e gli ingressi dall’istante iniziale, ha la forma generale: ∫ ττ+= τ−− t t ttt deet 0 0 )()( )( 0 )( Buxx FF 0tt ≥ (1.12) Il primo termine identifica la risposta ad ingresso zero o risposta libera (evoluzione del sistema privo di ingressi dovuta alle sole condizioni iniziali), il secondo termine identifica la risposta a stato zero o risposta forzata (evoluzione in risposta agli ingressi del sistema a condizioni iniziali nulle). L’espressione )( 0tt e −F è una matrice NxN funzione del tempo che prende il nome di matrice esponenziale o matrice di transizione4 . Il nome di matrice esponenziale deriva dall’analogia con la funzione esponenziale nel campo scalare, che costituisce la soluzione delle equazioni differenziali lineari del primo ordine. La matrice esponenziale possiede proprietà analoghe all’esponenziale scalare. Alcune proprietà sono: 1F =⋅0 e 00 )( tttt eee FFF −− = )()()( 020112 tttttt eee −−− = FFF )()( 00 tttt ee dt d −− = FF F dove 1 è la matrice unità di ordine N. La matrice esponenziale ha lo sviluppo in serie di potenze uguale formalmente alla serie dell’esponenziale scalare. Sotto opportune condizioni di convergenza vale infatti la serie di matrici: 4 La dizione “matrice di transizione” è la più usata nella Teoria dei Sistemi. Per essa è comune anche il simbolo Φ(.). Con questa notazione la (12) si scrive ∫ τττ−Φ+−Φ= t t dtttt 0 )()()()( 00 Buxx .
- 8. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 8 di 18 K+++++= !4!3!2 4 4 3 3 2 2 ttt te t FFFF1F che in linea di principio ne consente il calcolo per via numerica. Il calcolo della matrice esponenziale sarà ripreso in seguito. Soluzione per via diretta Il sistema di N equazioni differenziali del primo ordine si può trasformare in una equazione differenziale di ordine N in una delle v. di s. come unica incognita (ciò si ottiene in modo elementare con successive derivazioni ed eliminazioni). Ciò consente di ricondurci alla teoria delle equazioni differenziali lineari a parametri costanti. Si consideri una equazione differenziale completa: la soluzione è data dalla composizione dell'integrale generale dell’omogenea associata e dell'integrale particolare dell’equazione completa. L'integrale particolare dipende dalle forzanti e va determinato caso per caso. Si ottiene quindi nella v. di s. evidenziata: )()()( txtxtx pg += (1.13) Il transitorio proprio del sistema è determinato dall’integrale generale dell’omogenea associata. E’ noto dalla teoria dei sistemi differenziali lineari a coefficienti costanti che l’integrale generale, escludendo radici coincidenti, può essere scritto in forma scalare come: ∑= λ = N k t kg k eCtx 1 )( (1.14) dove: • Ck sono coefficienti arbitrari che vanno fissati in base alle condizioni iniziali. • λk sono le radici dell’equazione algebrica risolvente. Si può dimostrare che l’equazione algebrica risolvente coincide, a meno di un fattore moltiplicativo comune, con l’equazione caratteristica del sistema originario. Quindi le radici dell’equazione algebrica risolvente sono ancora gli autovalori della matrice di stato. L’estensione della (1.13) a tutte le v. di s. consente di formulare la soluzione in forma vettoriale come: )()()( ttt pg xxx += (1.15) E’ da notare che i singoli termini nelle formulazioni (1.12) e (1.15) non coincidono.
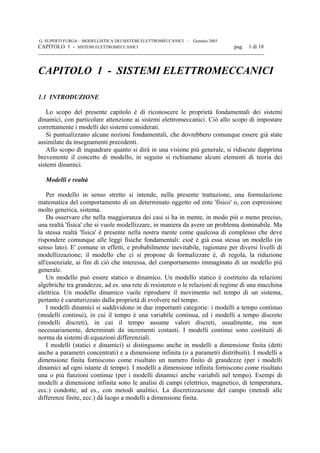
- 9. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 9 di 18 Stabilità La (1.14) chiarisce il criterio di stabilità prima enunciato. E’ stabile un sistema per cui risulta: Nii ..10)Re( =∀≤λ e asintoticamente stabile nel caso in cui si abbia: Nii ..10)Re( =∀<λ Si consideri infatti l’equazione differenziale completa (1.13). Se per il sistema in esame risulta verificata l'asintotica stabilità si ha che: 0)( 1 limlim == ∑= λ ∞→∞→ N k t k t g t k eCtx ed è quindi possibile individuare una situazione di regime legata al solo integrale particolare e quindi caratterizzato da una forma d'onda che dipende dalla forma d'onda delle forzanti esterne. Riformulazione del transitorio Per la determinazione esplicita di un particolare transitorio è necessario conoscere il valore delle variabili di stato all’istante iniziale: 00 )( xx =t e l’andamento degli ingressi (nelle reti i generatori indipendenti di tensione e di corrente), chiamati anche forzanti, dall’istante iniziale in poi. Le condizioni iniziali impongono sulla (1.15): )()( 000 tt pg xxx −= (1.16) Ciò consente di decomporre l’andamento del sistema (1.15) nella somma del regime )(tpx più il transitorio di un sistema autonomo )(tgx , soggetto alle condizioni iniziali (1.16). Data l’importanza di principio e pratica di questo risultato, conviene riconoscerlo come risultato della decomposizione del sistema in esame in due configurazioni: la prima soggetta alle forzanti e con opportune condizioni iniziali tali da fornire la sola soluzione di regime; la seconda priva di ingressi e con condizioni iniziali complementari. Per sovrapposizione, l’andamento completo è la somma delle evoluzioni dei due sistemi, che coincidono con i due termini della (1.15). La decomposizione è visualizzata in Fig. 1.1.
- 10. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 10 di 18 u(t) CONDIZIONI INIZIALI x0 = u(t) CONDIZIONI INIZIALI x (t )p + CONDIZIONI INIZIALI x -00 x (t )p 0 REGIME TRANSITORIO SENZA FORZANTI TRANSITORIO COMPLETO Fig. 1.1. Decomposizione del sistema dinamico. Dopo avere determinato il regime, lo studio del transitorio si riduce allo studio di un sistema autonomo. In esso le forzanti appaiono solo attraverso i valori al tempo iniziale degli andamenti di regime. Tale impostazione è molto significativa, infatti evidenzia che la parte transitoria di un sistema dinamico lineare è proporzionale alla differenza tra i valori che le variabili di stato hanno all’istante iniziale e i valori che dovrebbero avere se il sistema fosse in quell’istante già a regime. Soluzione di regime Nei casi di interesse di ingressi periodici di tipo usuale (forzanti costanti o sinusoidali) nelle reti elettriche, gli integrali particolari sono determinabili risolvendo la rete a regime. Si ha quindi: • nel caso di ingresso costante si considera il circuito a regime in corrente continua per determinare l'integrale particolare (i condensatori e le porte capacitive sono circuiti aperti, gli induttori e le porte induttive sono corti circuiti); • nel caso di ingresso sinusoidale l'integrale particolare può essere determinato attraverso l'analisi del circuito basata sull'algebra dei fasori. Forzanti cisoidali Le funzioni cisoidali sono del tipo t Uetu γ =)( L’integrale particolare di forzanti cisoidali (caratterizzate da un γ comune) si ottiene dal sistema dinamico con la sostituzione del parametro γ al simbolo di derivata: t et γ− −γ= BUF1x 1 )()( Se le forzanti sono espresse come )Re( t eγ , purché F sia reale, vale la: [ ]t et γ− −γ= BUF1x 1 )(Re)(
- 11. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 11 di 18 In particolare: - il regime sinusoidale si ottiene dal sistema dinamico con la sostituzione dei fasori alle variabili ed il termine ωj al simbolo di derivata. UBF1X 1 )( − −ω= j - il regime continuo si ottiene come BUFX 1− −= Va osservato che, quando 0)Re( ≠γ , le forzanti cisoidali non sono periodiche. Quindi l’integrale particolare non è periodico e non si è in regime periodico. Tuttavia, considerata anche l’importanza prevalente delle forzanti periodiche, nel seguito con il termine ‘regime’ si indicherà l’integrale particolare, anche se non periodico. Soluzione del transitorio del sistema autonomo Sia dato il sistema autonomo Fx x = dt d (1.17) con le condizioni iniziali 00 )( xx =t Si è visto che la soluzione è del tipo 0 )( 0 )( xx F tt et − = Determinazione della matrice esponenziale Noti gli autovalori della matrice di stato, la matrice esponenziale si determina mediante la risoluzione di sistemi algebrici. Si propongono due approcci. Il primo è più intuitivo, il secondo ricorre a conoscenze approfondite di analisi matriciale. Il primo metodo si basa sulla nozione che l’integrale generale di ogni variabile di stato è la somma di esponenziali negli autovalori, ciascuno moltiplicato per una costante da determinarsi. Pertanto, sotto l’ipotesi di autovalori distinti, alla soluzione si può dare l’espressione )()( 0 )( 0 tet tt DCxx F == − (1.18) dove C è la matrice NxN di costanti di integrazione, da determinarsi mediante le condizioni iniziali, e
- 12. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 12 di 18 = −λ −λ −λ )( )( )( 0 02 01 )( tt tt tt N e e e t L D è il vettore colonna formato dagli esponenziali negli autovalori (distinti) Gli N2 coefficienti della matrice C richiedono N2 relazioni scalari, ovvero N relazioni vettoriali di ordine N. Queste si ottengono imponendo alla (1.18) di soddisfare alle condizioni iniziali e alle derivate all’istante iniziale fino alla derivata di ordine N-1. Le derivate all’istante iniziale si valutano iterativamente dalla (1.17) conoscendo i valori iniziali delle v. di s. 0 0 )( Fx x = dt td 0 20 2 0 2 )()( xF x F x == dt td dt td … 0 1 2 0 2 1 0 1 )()( xF x F x − − − − − == N N N N N dt td dt td Essendo = 1 1 1 )( 0 L tD λ λ λ = −λ −λ −λ )( )( 2 )( 1 0 02 01 )( ttk N ttk ttk k k N e e e t dt d L D e λ λ λ = k N k k k k t dt d L 2 1 0 )(D L’uguaglianza dei valori iniziali e delle derivate iniziali tra le (1.18) conduce alle N relazioni matriciali: = 1 1 1 0 L Cx λ λ λ = N L 2 1 0 CFx λ λ λ = 2 2 2 2 1 0 2 N L CxF … λ λ λ = − − − − 1 1 2 1 1 0 1 N N N N N L CxF (1.19) che consentono di determinare gli NxN componenti della matrice C. Dalle (1.19) si ottiene anche, per accostamento, la soluzione formale: [ ] 1 12 1 3 2 33 1 2 2 22 1 1 2 11 0 1 0 2 00 1 1 1 1 − − − − − − λλλ λλλ λλλ λλλ = N NNN N N N N NxN L LLLLL L L L L xFxFFxx1C Il secondo metodo, più sintetico, si basa sull’utilizzo del teorema di Cayley sulle funzioni di matrici, che consente di affermare che la matrice esponenziale di ordine N è esprimibile con il polinomio matriciale seguente di grado N-1, mediante le funzioni incognite )(tkφ :
- 13. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 13 di 18 1 1 2 210 )( )()()()(0 − − − φ++φ+φ+φ= N N tt tttte FFF1F K (1.20) Poiché ogni funzione di matrice in una generica matrice quadrata F è soddisfatta anche da ogni autovalore di F, la (1.20) dà luogo ad N relazioni scalari, una per ogni autovalore, che consentono la determinazione delle N funzioni incognite: 1 1 2 210 )( )()()()(0 − − −λ λφ++λφ+λφ+φ= N kNkk tt tttte k K Nk ,,1 K= Dopo alcune riorganizzazioni matriciali, si ottengono le funzioni incognite: λλλ λλλ λλλ λλλ = φ φ φ −λ −λ −λ − − − − − − )( )( )( 1 12 1 3 2 33 1 2 2 22 1 1 2 11 1 1 0 0 02 01 1 1 1 1 )( )( )( tt tt tt N NNN N N N N N e e e t t t L L LLLLL L L L L che consentono di esplicitare l’espressione (1.20) della matrice esponenziale in funzione della matrice di stato e dei suoi autovalori. Osservazioni pratiche Se è richiesto l’andamento nel tempo di una sola v. di s., il sistema (1.19) si riduce alla determinazione delle sole N costanti relative a quella variabile, mediante le N relazioni scalari (si omette per chiarezza il pedice della v. di s.): ∑= = N k kCx 1 0 ∑= λ= N k kk C dt tdx 1 0 )( ∑= λ= N k kk C dt txd 1 2 2 0 2 )( … ∑= − − − λ= N k k N kN N C dt txd 1 1 1 0 1 )( Se è richiesto solamente l’andamento nel tempo di una variabile di uscita, conviene esprimere questa nella forma: ∑= −λ = N k tt k k eAty 1 )( 0 )( Indi determinare le N costanti incognite mediante N relazioni scalari analoghe alle precedenti, nelle quali le condizioni iniziali dell’uscita sono combinazioni lineari note delle corrispondenti condizioni iniziali delle v. di s. Casi particolari 1) Sistema del primo ordine.
- 14. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 14 di 18 La (1.5) diventa scalare. La matrice esponenziale si riduce all’esponenziale usuale in cui compare l’unico autovalore F=λ (scalare). 0x=C . 2) Sistema del secondo ordine. Sia = 2221 1211 aa aa F = 20 10 0 x x x 21 λλ gli autovalori [ ] +λ−+−λ+− ++λ−−−λ λ−λ = = − λ−λ + + λ−λ = λ λ = − 202211021202221021 201210111201210112 12 12 2022102120 2012101110 12 1 2 1 00 )()( )()(1 11 1 1 1 xaxaxaxa xaxaxaxa xaxax xaxax Fx1xC Va ricordato che 111222 221112 aa aa +λ−=−λ +λ−=−λ 1.3 SISTEMI DINAMICI NEL DOMINIO DI LAPLACE I sistemi dinamici lineari tempo-invarianti si possono risolvere ricorrendo alla trasformata di Laplace. Si tenga presente che questo è un metodo solo formalmente diverso, i calcoli essenziali sono sostanzialmente gli stessi. L’unica differenza sostanziale è che con Laplace si riescono a trattare meglio le discontinuità e le situazioni degeneri. Si applica la trasformazione di Laplace al sistema (1.5). Per la regola di derivazione diviene: )()()( 0 ssss BUFXxX +=− Risolto nelle v. di s. si ottiene: ( ) [ ]0 1 )()( xBUF1X +−= − sss (1.21) La (1.21) conferma che i valori iniziali si trasformano in ingressi impulsivi. La (1.21) è la matrice delle f. di t. fra tutti gli ingressi, comprese le condizioni iniziali, e tutte le v. di s. Le uscite si ottengono con relazioni lineari algebriche dalle v. di s. La (1.21) è decomponibile, per linearità, nella somma della risposta a stato zero e ad ingresso zero. E’ da osservare che l’operazione di inversione della matrice ( )F1 −s dà luogo a una matrice i cui termini sono rapporti di polinomi in s. Il denominatore è il determinante della matrice, pertanto è un polinomio di grado pari all’ordine del sistema ed è comune a tutte le f. di t.; coincide con la equazione caratteristica della matrice di stato. Le radici dell’equazione caratteristica a denominatore, che costituiscono i poli delle f. di t., sono ancora gli autovalori
- 15. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 15 di 18 della matrice di stato. I polinomi a numeratore, complementi algebrici dei termini della matrice da invertire, differenziano tra loro le f. di t. Funzioni di trasferimento Ricordate le (1.6), la relazione matriciale tra ingressi ed uscite è )()()( sss UMY = ( ) UX DBF1DM +−= −1 )( ss Mentre la analoga relazione tra valori iniziali ed uscite è 00 )()( xMY ss = ( ) 1 0 )( − −= F1DM X ss Il metodo generale di soluzione richiede di trasformare la funzione di ingresso (si utilizzano di norma le tabelle di trasformazione e le proprietà della trasformata), si moltiplica per la funzione di trasferimento appropriata, poi si antitrasforma l’espressione risultante (si utilizzano ancora le tabelle di trasformazione e le proprietà della trasformata). Transitorio proprio Sulle reti elettriche, soggette ad ingressi di tipo usuale, è conveniente procedere alla decomposizione seguente, già proposta nel dominio del tempo. La relazione lineare (1.21) è decomponibile nella somma del termine di regime (o forzato) e del transitorio proprio. Il termine di regime si determina in modo diretto. Il transitorio proprio è governato dalla relazione ad ingresso impulsivo ( ) 0 1 )( gss xF1X − −= (1.22) Dove la costante 0gx è la differenza tra le v. di s. forzate ed iniziali secondo la (1.15). La antitrasformazione della (1.22) costituisce un metodo alternativo per la soluzione del transitorio proprio. Confrontata la (1.18) con la (1.22), la matrice esponenziale è la antitrasformata ( )[ ]11 −− −= F1F se t L 1.4 SISTEMI ELETTROMECCANICI I sistemi di nostro interesse sono i sistemi in cui sono presenti fenomeni elettrici (in senso lato) ed eventualmente parti meccaniche in movimento o deformazione (sistemi elettromeccanici). Date per note da altri Corsi le definizioni e le proprietà fondamentali dei circuiti elettrici, degli induttori e condensatori, consideriamo un multiporta elettrico (cioè un sistema connesso all'esterno con un certo numero di coppie di morsetti elettrici). Relativamente a questo diamo le seguenti definizioni.
- 16. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 16 di 18 - Sistema magnetico: un sistema in cui un insieme di flussi concatenati ψ e/o correnti i costituisce un insieme di variabili di stato (cioè non vi sono v. di s. di altro tipo, un es. è una rete di induttori, mutui induttori e resistenze). - Sistema magnetico ideale (o sistema di induttori): un sistema in cui un insieme di v. di s. è costituito da flussi concatenati esprimibili attraverso le tensioni di porta come impulsi di tensione, cioè per ogni porta v i v i v i 1 2 1 2 3 3 Fig. 1.2 flusso concatenato ∫∞− =ψ t vdt (1.23) (è il caso di un insieme di induttori ideali mutuamente accoppiati). Si noti che la (1.23) è la legge dell'induzione elettromagnetica applicata alla porta elettrica. - Sistema dielettrico: un sistema in cui un insieme di cariche elettriche q e/o tensioni v costituisce un insieme di variabili di stato (un es. è una rete di condensatori e resistenze). - Sistema dielettrico ideale (o sistema di condensatori): un sistema in cui un insieme di v. di s. è costituito da cariche elettriche esprimibili attraverso le correnti di porta come impulsi di corrente, cioè per ogni porta carica elettrica ∫∞− = t idtq (1.24) (è il caso di un insieme di condensatori ideali). - sistema elettrico: quando le v. di s. sono costituite da tensioni, correnti, cariche, flussi concatenati. - Sistema elettromeccanico: quando oltre a v. di s. elettriche sono presenti v. di s. meccaniche (come posizioni, velocità, angoli, velocità angolari). I sistemi elettromeccanici hanno quindi al loro interno parti in movimento o deformazione (o che immaginiamo con possibilità di movimento). I sistemi scambiano con l'esterno lavoro sotto forma elettrica (lavoro elettrico) alle porte elettriche. Assunte le direzioni di riferimento associate degli utilizzatori il lavoro elettrico elementare entrante ad una porta (elettrica) caratterizzata dai valori v e i vale lavoro elettrico elementare vidtLe =δ (1.25) In un sistema di induttori, per la (1.23) il lavoro elettrico ad una porta risulta ψ=δ idLe In un sistema di condensatori, per la (1.24) il lavoro elettrico ad una porta risulta vdqLe =δ
- 17. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 17 di 18 Altra forma di lavoro è il lavoro meccanico, indicato d'abitudine come uscente. Il lavoro meccanico uscente, per uno spostamento elementare dy vale lavoro meccanico elementare dyFL ym =δ (1.26) dove Fy è la componente nella direzione e nel verso positivo di y della forza del sistema sull'esterno. Nel caso di spostamento angolare (rotazione) dθ è valida la forma equivalente alla (1.26) lavoro meccanico elementare θ=δ θdCLm (1.27) dove Cθ è la componente nella direzione e nel verso positivo di θ della coppia del sistema sull'esterno. Altri tipi di scambi energetici, sotto forma termica, chimica od altro, non saranno considerati. A titolo di esempio si consideri una macchina elettrica rotante, per semplicità ad un solo circuito elettrico (Fig. 1.2) costituita dallo statore e dal rotore. Si può considerare: 1) il solo sistema elettrico costituito dall'avvolgimento (v. di s. la corrente i, ingressi la tensione v, l'angolo meccanico del rotore θm e la velocità angolare ωm, uscite la corrente i e le coppia Ce), mentre la parte meccanica è considerata all'esterno del sistema (può costituire un sistema meccanico); 2) il sistema costituito dalla parte elettrica e l'angolo meccanico (v. di s. i e θm, ingressi v e ωm, uscite la corrente i e le coppia Ce); 3) il sistema completo (v. di s. i, θm e ωm, ingressi v e la coppia resistente Cm, uscite i e ω m). CIRCUITI ELETTRICI i θm ωm C e ωm θm i v C m 1 2 3 Fig. 1.3. 1) Sistema elettrico, 2) Sistema elettromeccanico, 3) Sistema elettromeccanico. 1.5 FUNZIONI DI STATO - ENERGIA Le N v. di s. di un sistema definiscono uno spazio ad N dimensioni (chiamato spazio di stato o spazio delle fasi). Un punto in questo spazio corrisponde ad uno stato del sistema, di cui le v. di s. sono le coordinate. Inoltre una trasformazione sulle v. di s. può interpretarsi come un cambiamento di riferimento dello spazio di stato.
- 18. G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Gennaio 2003 CAPITOLO 1 - SISTEMI ELETTROMECCANICI pag. 18 di 18 Il movimento di un sistema appare come una traiettoria nello spazio di stato. Si osservi che una traiettoria non contiene tutte le informazioni del movimento, in quanto manca la coordinata temporale, in altre parole manca la informazione degli istanti di tempo in cui la traiettoria è percorsa. Una funzione di stato f(x) è una funzione esplicita delle v. di s. di un sistema. Dalla definizione segue che il differenziale di una funzione di stato è una forma differenziale esatta nello spazio di stato. Si ricorda la proprietà, che verrà utilizzato in seguito, che la derivata parziale seconda di una funzione di stato rispetto a due diverse v. di s. non dipende dall'ordine di derivazione. L'energia W(x) di un sistema (se esiste) è una particolare funzione di stato le cui variazioni, per definizione, uguagliano il lavoro (in qualsiasi forma) scambiato dal sistema con l'esterno. Con le convenzioni di segno normalmente assunte, lavoro entrante corrisponde ad aumento di energia. Considerato un movimento dallo stato A (v. di s. xA) allo stato B (v. di s. xB) e il lavoro totale L entrante nel sistema durante il movimento, si formalizza la definizione di energia come energia W W LB A AB( ) ( )x x− = (1.28) o in forma differenziale dW=δL. L'energia è definibile quindi se, per ogni movimento del sistema, il lavoro totale entrante dipende solo dagli estremi della traiettoria. Sistemi che godono di tale proprietà si dicono conservativi. L'energia è definita dalla (1.28) a meno di una costante. Per pura ragione di comodo si può assegnare energia nulla ad uno stato assunto come riferimento. Usualmente si sceglie lo stato (o uno degli stati) ad energia minima, così da avere l'energia sempre positiva. La generica energia W(x) è pari al lavoro dall'esterno necessario per portare il sistema dallo stato di riferimento allo stato generico. Va osservato che le definizioni di energia e la proprietà di sistema conservativo o meno sono dipendenti dalle assunzioni fatte nella modellizzazione del sistema fisico, legate quindi più al modello che al sistema, inteso come 'realtà'. Ad es. gli induttori e condensatori sono in grado di immagazzinare energia. E' noto che una rete di induttori e condensatori ideali è conservativa. In presenza di resistori (elementi dissipativi) nel sistema, non esiste l'energia se limitata alle forme magnetica e dielettrica. Ma se si considera anche l'energia termica, cioè il calore immagazzinato, e nel contempo gli scambi di calore con l'esterno, il sistema torna ad essere conservativo5 . Quanto alle parti meccaniche di un sistema, queste possono immagazzinare energia cinetica, potenziale gravitazionale ed elastica. Le forme di energia coinvolte, e quindi le espressioni analitiche esplicite che questa assume, sono diretta conseguenza delle scelte della modellizzazione e dei confini di comodo posti al sistema. Anzi spesso la enunciazione delle forme di energia prese in considerazione è un modo molto significativo per stabilire i limiti di un modello. 5 E' conservativo secondo il Primo Principio della Termodinamica, anche se il Secondo Principio pone vincoli al verso del trasferimento di calore.