The document discusses a method for automatically inferring architectural models from code in ROS-based robotic systems, highlighting the challenges of manual model inference and the scattered nature of architecture-defining code. The presented approach utilizes static analysis of API calls to achieve high accuracy in recovering component models, which aids in identifying bugs related to software component interactions. It emphasizes that while manual inference is resource-intensive, the application of automated, model-based analyses can significantly enhance the efficiency of developing robotic systems.
![Legend
05/29/2023 Tobias Dürschmid:Architectural Model Inference from Code for ROS-based Robotics Systems
Software
Component
Connector
Planning
Perception
Motor Controller
Port
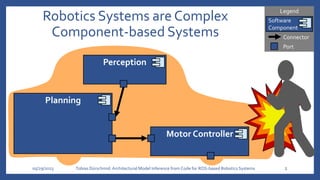
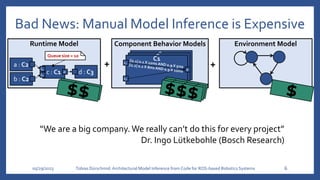
Some Bugs Result from Incorrect
Composition of Software Components
[ready = true]
[ready = false]
10 Hz
[ready == true]
3
component waits
indefinitely](https://image.slidesharecdn.com/icra-231019011942-2cfecf59/85/Architectural-Model-Inference-From-Code-For-ROS-Based-Robotics-Systems-3-320.jpg)
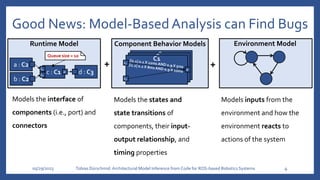
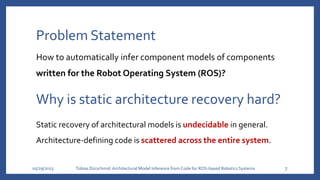
![Our previous work ROSDiscover[1]
can Infer Run-Time Models Statically
05/29/2023 Tobias Dürschmid:Architectural Model Inference from Code for ROS-based Robotics Systems 9
Approach: Architectural recovery using static analysis of API calls +
rule checking
Tool available at GitHub: https://github.com/rosqual/rosdiscover
Results: >90% recovery of runtime architectural models
Detecting 8 of 19 of real-world bugs
[1] C. S.Timperley,T. Dürschmid, B. Schmerl, D. Garlan and C. Le Goues, "ROSDiscover: Statically
Detecting Run-TimeArchitecture Misconfigurations in Robotics Systems," ICSA 2022](https://image.slidesharecdn.com/icra-231019011942-2cfecf59/85/Architectural-Model-Inference-From-Code-For-ROS-Based-Robotics-Systems-9-320.jpg)
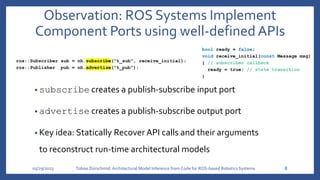
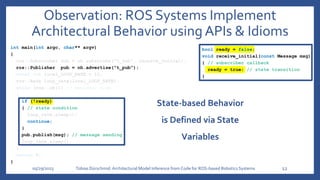
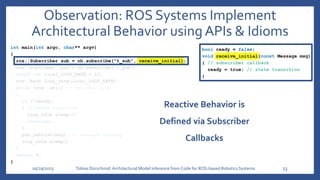
![int main(int argc, char** argv)
{
ros::Subscriber sub = nh.subscribe("t_sub", receive_initial);
ros::Publisher pub = nh.advertise("t_pub");
const int local_LOOP_RATE = 10;
ros::Rate loop_rate(local_LOOP_RATE);
while (ros::ok()) // periodic loop
{
if (!ready)
{ // state condition
loop_rate.sleep();
continue;
}
pub.publish(msg); // message sending
loop_rate.sleep();
}
return 0;
}
05/29/2023 Tobias Dürschmid:Architectural Model Inference from Code for ROS-based Robotics Systems 11
bool ready = false;
void receive_initial(const Message msg)
{ // subscriber callback
ready = true; // state transition
}
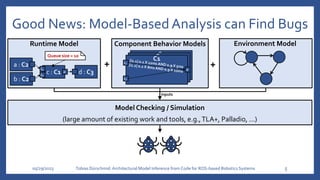
Periodic Behavior
is Defined via
Rate Objects
Observation: ROS Systems Implement
Architectural Behavior using APIs & Idioms
Planning
[ready = true]
[ready = false]
10 Hz
[ready == true]](https://image.slidesharecdn.com/icra-231019011942-2cfecf59/85/Architectural-Model-Inference-From-Code-For-ROS-Based-Robotics-Systems-11-320.jpg)
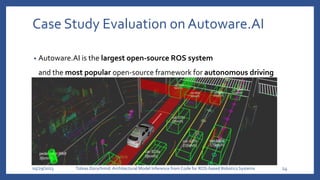
![State Conditions on Objects are Hard to
Infer Statically
Example of State-based Behavior ROSInfer cannot find:
lane_planner::vmap::VectorMap all_vmap;
void cache_point(const vector_map::PointArray& msg)
{
all_vmap.points = msg.data; // state change
update_values();
}
void update_values()
{
// complex state condition
if (all_vmap.points.empty() || all_vmap.lanes.empty() || all_vmap.nodes.empty())
return;
[...]
lane_planner::vmap::publish_add_marker([...]);
}
05/29/2023 Tobias Dürschmid:Architectural Model Inference from Code for ROS-based Robotics Systems 17](https://image.slidesharecdn.com/icra-231019011942-2cfecf59/85/Architectural-Model-Inference-From-Code-For-ROS-Based-Robotics-Systems-17-320.jpg)
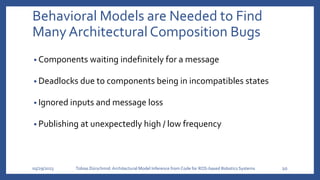
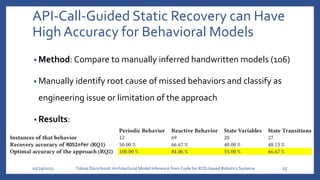
![Summary
• Manual Model Inference is Expensive
• Assumptions about framework-specific APIs and idioms enable the
automatic inference of behavioral & structural component models for
ROS-based Robotics systems
• This work makes model-based analyses more accessible and practical
05/29/2023 Tobias Dürschmid:Architectural Model Inference from Code for ROS-based Robotics Systems 18
Planning
[ready = true]
[ready = false]
10 Hz
[ready == true]](https://image.slidesharecdn.com/icra-231019011942-2cfecf59/85/Architectural-Model-Inference-From-Code-For-ROS-Based-Robotics-Systems-18-320.jpg)