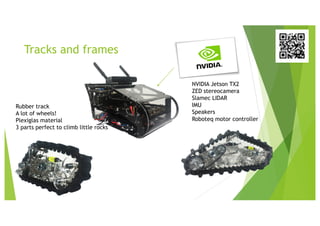
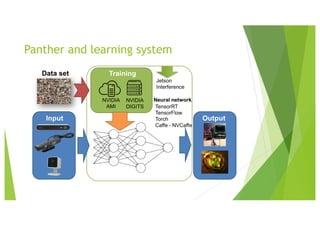
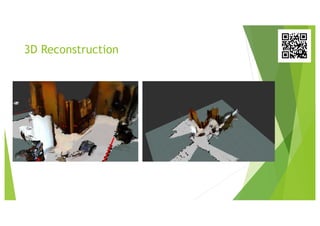
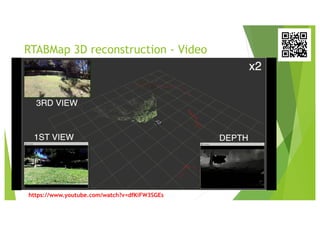
Raffaello Bonghi is a PhD automation and robotics engineer with extensive education and experience in autonomous systems and mobile robotics. His current project, Panther, is a high-end autonomous mobile robot capable of 2D/3D reconstruction and navigation, utilizing a combination of advanced technology including NVIDIA Jetson TX2 and various sensors. Bonghi has participated in several technology events showcasing Panther and its capabilities in robotics and augmented reality.