3. PIC-MICROCONTROLLER BASED
ROBOTIC VEHICLE
DEPARTMENT OF TELECOMMUNICATIONENGINERING
SRI SIDDHARTHA INSTITUTE OF TECHNOLOGY
TUMKUR- 572105. (KARNATAKA)
2008-2009
by:
NIRMAL KUMAR JAIN S.S
RAGHAVENDRA.N
VINAY.L.A
UNDER THE GUIDANCE
Prof. K.B. SHIVAKUMARProf. K.B. SHIVAKUMAR
B.E, M.Tech, M.B.A, M.I.S.T.E, M.I.EB.E, M.Tech, M.B.A, M.I.S.T.E, M.I.E
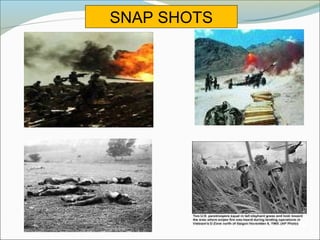
4. 1.kargil war between India and Pakistan in late 1990’s
2. world trade centre attack of united states in 2005
3. dark day of India in year 2008 that is MUMBAI
ATTACK ON 26/11
ROADS FOR DEVELOPMENT
5. SYNOPSIS
The advancement in science and technology has lead to
many changes in the way of life through its applications like
robots, space research, medical appliances, automobiles,
military, education etc… In this regard we have made an
attempt to design microcontroller based system.
8. RF Transmitter
HT 12 Encoder
Camera Transmitter
REMOTE SECTION
Base station
4X4 Matrix Keypad
Return
Scan
9. 1.POWER SUPPLY
2. VIDEO TRANSMITTER
3. MICROCONTROLLER
4. MOTOR
5. DRIVER CIRCUIT
6. RF TRANSMITTER AND RECEIVER
7.
BATTERY
8. WIRELESS CAMERA
BLOCK DIAGRAM COMPONENTS
10. POWER SUPPLY
The micro-controller and other devices get power
supply from AC to DC adapter through voltage regulator.
The adapter output voltage is 12V DC non-regulated.
7805- voltage regulators are used to convert 12V to
5V DC.
DC OutputAC Power
AC/DC
Adapter
Regulator
(7805)
Filter
15. User will enter commands to control the car, these commands are read
by micro-controller and are encoded into RF format using encoder chip.
Features:
•Operating voltage 2.4V~12V for the HT12E.
•Low standby current: 0.1A at VDD=5V.
•Built-in oscillator needs only 5% resistor.
•Data code has positive polarity.
•Minimal external components.
•HT12E: 18-pin DIP/20-pin SOP package.
HT12E-ENCODER
16. The user commands in the RF signal format is received by the RF receiver
and is decoded into initial form by using the decoder.
Features
•Operating voltage: 2.4V~12V
•Capable of decoding 12 bits of information
•Received codes are checked 3 times
•HT12D: 8 address bits and 4 data bits
•Built-in oscillator needs only 5% resistor
•Easy interface with an RF or infrared transmission medium.
HT12D-DECODER
21. This project used the Micro-controller, PIC16F877.
This is the heart of the system. It is used to indicate the
status of the controlled device / appliance. The binary
outputs of the decoder are detected by the Micro-
controller.
PIC16F877
22. •8bit high performance RISC CPU with CMOS flash
memory.
•35 single word instructions
•Operating range: DC - 20Mhz clock input
DC- 200ns instruction cycle
•Up to 8K 14 words of flash program memory
•Up to 368 x 8 bytes of data memory
•Up to 256 x 8 byte of EEPROM Data memory, 8 level
deep stack.
•Three timers and two capture, compare & PWM
modules
•Universal Synchronous Asynchronous Receiver
Transmitter with 9 bit addresses detection.
•32 I/O lines
•High Sink / Source current : 25mA
The feature of the PIC-Micro-controller is as follows
23. •It is user friendly.
•It has built in memory.
•It has EEPROM, which is accessable to user.
•It has counter.
•It has Timer, USART.
•Speed of operation is more (2 MHz to 20 MHz).
•Built in ADC conversion.
•Built in interrupt module.
•We can debug the program with in circuit
• (In circuit Debugger Module).
•When computer hangs up we can use watchdog timer.
Advantages of PIC-Micro-controller
32. Micro controller based robotic vehicle system
is working correctly for different test condition.
The performance of the project can be improved
using by carefully designed gear mechanism
and additional hardware in the system.
Simplicity in operation, less weight, small size,
and low power consumption, portable and
reliable operations are the main advantages of
this system.
CONCLUSION