Performance analysis of stand alone ( roof top ) PV system.
Combined report
1. EFFICYCLE SAE INDIA 2014-Electric Power Train Report
The objective of competition is to design and manufacture an energy efficient eco-
friendly tricycle. This competition helps students to face real world engineering problems
in design and manufacturing of automobile.
Electric Power Train:
Motor:-
An electric motor is a device which converts electrical energy to mechanical energy. The
direction of mechanical force is given by Fleming’s Left hand rule
and magnitude is given by;
F=BIl newton
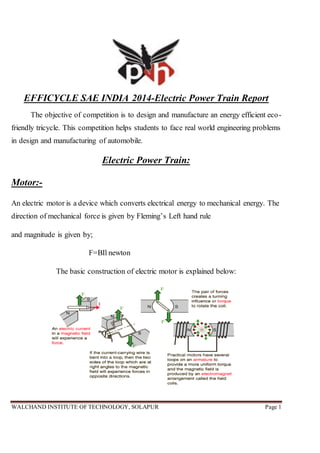
The basic construction of electric motor is explained below:
WALCHAND INSTITUTE OF TECHNOLOGY, SOLAPUR Page 1
2. Main type of Motor:
The different types in electric motors world as follows.
Electric motors are broadly classified into two categories as follows:
i. AC Motors.
ii. DC Motors.
An AC motor is an electric motor driven by an alternating current. It basically consists of
two part, an outside stationary stator and an inside rotor.
DC motor is an electric motor driven by direct current.
Advantages of DC motor:
i. Torque vs. Speed characteristic is easy to plot.
ii. Easy to control speed with wide range.
iii. High starting torque.
iv. Accurate steep less speed with constant torque.
v. Have variable speed controller.
Types of DC motors:
The DC motors are divided mainly to:
i. Brush DC motors (BDC).
ii. Brushless DC motors (BLDC).
WALCHAND INSTITUTE OF TECHNOLOGY, SOLAPUR Page 2
3. Advantage of BLDC motor with respect to PMDC motor:
i. High efficiency.
ii. High power to volume ratio.
iii. High performance ratio.
iv. Large amount of torque over a vast speed.
v. Electronically communicated as no brushes.
vi. Life expediency is 10000hr.
vii. Responsiveness and quick acceleration.
viii. High power density and reliability.
Due to above reasons the BLDC motor is selected.
Calculation to plot traction hyperbola:
The starting torque of the cycle is calculated from the velocity vs. tractive effort
graph.
We get the value of torque by using formula,
RPM Direct= (60*v*i)/ (2*3.14*r)
FZ Direct= Pmax/v (m/s)
The tractive effort is calculated by:
Tractive effort=Wheel resistance+
Air resistance+
Gradient resistance+
Acceleration resistance
ρL = density of air in rainy season = 1.2 kg/m3 (Max air density is in rainy season)
Cd = coefficient of air resistance = 1.2
A = projected frontal area = 1.02 m2
5. According to rules of effi-cycle and above curve we require a motor of 24 V, 400
W motor.
From above graph and requirement of rulebook the motor is being finalized.
The specification of finalized motor is:
Motor specification:
Power = 400 watt
Motor type =BLDC motor
Volt = 24 volt
Current = 20 ampere
Max. Rpm = 1500 rpm
Max. Torque =3.92 N.m
Steady torque = 2.55 N.m
-100
400
900
1400
1900
0 2 4 6 8 10 12 14 16 18 20
TractionN
Velocity kmph
Traction Dia Efficycle
Direct
Fzb3
Fzb5
Fza G1
"G1"
25.2 7 2191.3577 57.14286 154.2802 192.0882 229.9902
6. Battery:-
Definition:
An electric battery is a device consisting of one or more electrochemical cells
that convert stored chemical energy into electrical energy. Each cell contains a positive
terminal, or cathode, and a negative terminal, or anode. Electrolytes allow ions to move
between the electrodes and terminals, which allows current to flow out of the battery to
perform work.
Purpose of battery:
Battery works as a source of energy in vehicle. It serves as a power storage
and releases the same quickly to operate a starter motor .The battery must be able to
carry out all the function over a wide temperature range in the order of 243 to 343K.This
includes very cold starting condition as well as potentially high temperature under the
bonnet.
Classification:
The classification of battery is done according to the following
categories:
Primary cells or non-
rechargeable batteries
Secondary cells or
rechargeable batteries
Batteries by
application
Alkaline battery
Aluminium–air
battery
Aluminium-ion
battery
Atomic battery
Chromic acid cell
Zinc–air battery
Zinc–carbon battery
Flow battery
Fuel cell
Lead–acid battery
Lithium air battery
Lithium-ion battery
Molten salt battery
Nickel–zinc battery
Backup battery
Car battery
Common battery
Electric vehicle
battery
Inverter battery
Nano batteries
As per the Efficycle 2014 rulebook the rechargeable battery must be used.
Matrix table:
The characteristics of commonly used rechargeable batteries are shown in
matrix form.
7. NiCd NiMH Lead Acid Li-ion Li-ion polymer Reusable
Alkaline
Gravimetric Energy
Density(Wh/kg)
45-80 60-120 30-50 110-160 100-130 80 (initial)
Internal Resistance
(includes peripheral circuits) in
mΩ
100 to 2001
6V pack
200 to 3001
6V pack
<1001
12V pack
150 to 2501
7.2V pack
200 to 3001
7.2V pack
200 to 20001
6V pack
Cycle Life (to 80% of initial
capacity)
15002
300 to 5002,3
200 to
3002
500 to 10003
300 to
500
503
(to 50%)
Fast Charge Time 1h typical 2-4h 8-16h 2-4h 2-4h 2-3h
Overcharge Tolerance Moderate Low high very low Low Moderate
Self-discharge /Month (room
temperature)
20%4
30%4
5% 10%5
~10%5
0.3%
Cell Voltage(nominal) 1.25V6
1.25V6
2V 3.6V 3.6V 1.5V
Load Current
- peak
- best result
20C
1C
5C
0.5C or lower
5C7
0.2C
>2C
1C or lower
>2C
1C or lower
0.5C
0.2C or lower
Operating
Temperature(discharge only)
-40 to
60°C
-20 to
60°C
-20 to
60°C
-20 to
60°C
0 to
60°C
0 to
65°C
Maintenance Requirement 30 to 60 days 60 to 90 days 3 to 6 months9
not req. not req. not req.
Typical Battery Cost
(US$, reference only)
$50
(7.2V)
$60
(7.2V)
$25
(6V)
$100
(7.2V)
$100
(7.2V)
$5
(9V)
Cost per Cycle(US$)11
$0.04 $0.12 $0.10 $0.14 $0.29 $0.10-0.50
Commercial use since 1950 1990 1970 1991 1999 1992
Figure 1: Characteristics of commonly used rechargeable batteries
Lead acid battery:
Advantages: Inexpensive and simple to manufacture — in terms of
costper watt hours, the SLA is the least expensive.
Mature, reliable and well-understood technology —
when used correctly, the SLA is durable and provides
dependable service.
Low self-discharge —the self-discharge rate is among
the lowest in rechargeable battery systems.
Low maintenance requirements — no memory; no
electrolyte to fill.
Capable of high discharge rates.
From the above matrix table and some of its advantages we finalized Lead acid Battery.
8. Principle of operation:
Batteries convert chemical energy directly to electrical energy. A battery consists
of some number of voltaic cells. Each cell consists of two half-cells connected in series
by a conductive electrolyte containing anions and cations. One half-cell includes
electrolyte and the negative electrode, the electrode to which anions (Pb) migrate; the
other half-cell includes electrolyte and the positive electrode to which cations (PbO2)
migrate. Redox reactions power the battery. Cations are reduced (electrons are added)at
the cathode during charging, while anions are oxidized (electrons are removed) at the
anode during discharge. The electrodes do not touch each other, but are electrically
connected by the electrolyte (H2SO4+H2O). Some cells use different electrolytes for
each half-cell. A separator allows ions to flow between half-cells, but prevents mixing of
the electrolytes.
PbO2+2H2SO4=2PbSO4+2H2O
Charging Discharging
Finalized Battery:
As per the rule bookthe maximum specification of battery is12V-48V and
max 35A-hr rating.
Therefore, the selected battery has 24V volt, 18 Ahr rating.
We have,
(Ah) = Device's Wattage (W) x Time to run (Hours) / Battery Voltage (V)
18=400*time/24
Time=1.08hr
Run time of single battery=1.08hr
So, the run time of 2 batteries in series is 2.16 hr.
Thus from above calculation we have finalized two batteries in series as below:
24 Volt 18 Ah Sealed Lead Acid Battery.
9. Voltage:24V
Capacity:18Ah
Size: 7-1/8" long x 3" wide x 6-5/8" high (181mm x
76mm x 167mm)
Type: Sealed Lead-Acid / SLA
Connectors:Nut and bolt postconnectors / T4
Weight: 13.1 pounds
Item # BAT-12V18A
The batteries are mounted below the seat.
Innovation:-
The charging mechanism of the battery is the innovation.
The charging is done by pedalling. The diode is connected to motor and battery by
terminal block; this is connected to the second rear axle through which the charging
phenomena occur.
10. Steering Mechanism
Objectiveof steering system
I. To provide directional stability of the vehicle when going straight ahead.
II. To provide perfect steering condition.
III. To minimise tire wear.
Design methodology:
The steering system for the vehicle has to be designed to provide better control, good
ergonomics. The steering mechanism is accurate and easy to handle. Direct steering is employed
because there is no urge requirement of rack & pinion steering system. All the requirement are fulfilled
by using this mechanism.
Mechanism:
11. For the perfect steering we must always have an instantaneous centre about all wheels must
rotate . Figure shows this mechanism. Links AB & CD are integral with front axle. This links
are connected with each other through track rod BC with bell crank lever connected between
them when the vehicle is in straight ahead position these links make equal angle (alpha) the
dotted line shows position of vehicle when is turning left.
Construction-
Here, we are employed Ackermann mechanism .It consists of handle bar instead of steering
wheel which is connected to the fixed pivot of bell crank through steering column,
Arm is connected between track rod & link AD. Bell Crank is fixed at 20 cm apart from centre
line of vehicle. Both end of the lever of bell crank is connected to tie rod end as shown in fig.
Working:
Case1, left turn
In this case we require to move the handlebar in anticlockwise direction . The motion of
handle transfered to lever of bell crank . The lever moves upward & RHS tie rod moves
linearly to RHS side & steer the vehicle to LHS means vehicle take left turn. in case of right
turn handle moves clockwise leads to move the left side lever to move upward & tie rod
moves linearly to LHS side . Due to motion of steering arm the vehicle takes right turn.
Let,
L= length of track rod=57.17 cm.
R=length of link AB &CD= 150cm.
13. Steering
Suspension
Principles of Suspension
The suspension system isolates the body from road shocks and vibrations which would otherwise be
transferred to the passengers and load.
It also must keep the tires in contact with the road. When a tyre hits an obstruction, there is a reaction
force.
Sprung mass is that part of the vehicle supported by the springs such as the body, frame, and engine
and associated parts.
Un-sprung mass includes the components that follow the road contours, such as wheels, tyres, brake
assemblies and any part of the steering and suspension not supported by the springs.
Objective of suspension:
a. To withstand the component/vehicle in stable condition in pitching or rolling.
b. To prevent the road shocks from being transmitted to the vehicle components.
c. To safeguard the occupants from road shocks.
d. To preserve the stability of the vehicle in pitching or rolling, while in motion.
Types of SuspensionSpring
1. Coil spring
2. torsion bar
3. leaf spring
4. independent/non-independent (beam axle) track control arms/wishbones
Modern passenger vehicles usually use light coil springs.
Light commercial vehicles have heavier springs than passenger vehicles and can have coil springs at the
front and leaf springs at the rear.
Heavy commercial vehicles usually use leaf springs or air suspension.
1 Lengthof eachtie rod 150mm
2 Steeringangle 19.2degree
3 Wheel track 87.5cm
4 Wheel Base 150cm
5 Steeringratio 1:1
6 Distance betweenpivotcentres(c) 67.05cm
7 Lengthof track rod(l) 57.05cm
8 Bell Crank L=8cm,b=4cm
9 Inside turningradius 228.125cm
10 Outside turningradius 303.7cm
11 Lengthof steeringcolumn 65cm
12 Widthof handle 65cm
14. Fig. Coil Spring
Types of damper:
1. Mono tube
2. Twin tube
Elements of damper:
Main piston: In all dampers the main piston contains the primary valving components and
produces the majority of the damping forces.
Compression Piston:
Produces compression force based on the rod displacement through the Compression Piston.
Note that the Monotube damper does not have a Compression Piston.
Gas Separator Piston: Keeps the gas separated from the oil.
Main Piston Tube: This is the tube where the Main Piston operates.
15. Suspensionused: HYDRAULIC SHOCK ABSORBER
Calculations:
a. Helical Compression Spring
b. Axial force on rear wheel = 1.6 kN
We have designed 2 suspensions with axial force of 800 N
c. Spring index (C) = D/d = 5 . . . where D = mean dia. Of spring
d = wire dia. Of spring
d. Deflection = 25.4 mm = 1 inch
e. Material cold drawn steel wire with ultimate tensile strength = 1050 N/mm^2
f. Modulus of rigidity = 81370 N/ mm^2
1. Wire diameter:
Wahl factor = 1.3105
Ultimate tensile strength = 700 N/mm^2
d = 6 mm
2. Mean Coil Diameter:
D = 30 mm
3. No. of active coils:
N = 16 coils
4. Total no. of coils:
Nt = Na + Ni
= 16 + 2
= 18 coils.
5. Solid Length:
Ls = 108 mm
6. Free length:
Compressed length = 26.22 mm
It is assumed that there will be a gap of 0.5 mm between the consecutive coils
Total gap = (18 – 1) * 0.5
= 8.5 mm
Lf = 108 + 8.5 + 26.22
= 142.72 mm
= 143 mm
7. Spring rate:
K = 32 N/mm
8. Actual Spring rate:
K = 31 N/mm
Suspension used: Hydraulic shock absorber
Spring used: Coil suspension
Damper used: Hydraulic damper
16. Suspension provided on only rear wheel only because axial force acting on front wheel be
distributed on both the wheel equally; as the forces acting on front wheel is 820 N i.e. 410 N on
each wheel. As the speed of this cycle will not exceed more than 30 kmph the shocks or
vibration approaching on front wheel can be neglected/is very low. And this frequency cannot
harm the vehicle as the acceleration is very less. Here wheel, tires and frame even in some
condition absorbs the shocks i.e. they act as a shock absorbing system on front wheel.
Suspension used on rear wheel; as axial force acting on rear wheel is high i.e. 1350 N; coil
spring suspension is used. Material used for suspension is cold drawn steel wire as the tensile
strength and modulus of rigidity is high as compared with other material. During calculation we
don’t know the exact dynamic load approaching on cycle, so we have used factor of safety of 1.2
and made the remaining calculation. Suspension used is two in number and axial force acting on
them is 800 N each.
Mechanical Design-
Tadpole Design-
In this design, there are two frontwheels & one rear wheel. Factors considered are
weight distribution & center of mass.
Brakes
Front Brakes- We can use disk brakes in both front wheels as Disk brakes can be
mountedon the hub the wheels.
17. Advantages of using disc brakes
I. Greater braking power
II. Independencefromwheather conditions
III. Reducing braking distance
IV. Disc brakes are less prone to brakefade
Rear Brakes- A reliable braking systemfor the rear wheel, V-brakes because of its
higher mechanical advantage
18. V-brakes requireseparatetension springs in the left & right of the brake.
If one of side’s springs gets weaker with age, the spring on the other side pulls
the wholebrake.
I. V-brakes arelighter
II. V’s are cheaper
III. They are inexpensive & effective
IV. Easy to install
Braking technique
19. There are several techniques for efficient braking on a standard, two-brake
bicycle. The one most commonly taught is the 25-75 technique. This
method entails supplying 75% of the stopping power to the front brake, and
about 25% of the power to the rear. Since the bicycle's deceleration causes a
transfer of weight to the front wheel, there is much more traction on the
front wheel. Therefore, the rear brake can exert less braking force than on
the front before the rear wheel starts skidding. For a more-detailed analysis,
see bicycle and motorcycle dynamics. If too much power is applied to the
front brake, then the momentum of the rider propels him/her over the
handlebars, thereby flipping the bicycle. The skidding of the rear wheel can
serve as a signal to reduce force on the front brake; a skillful cyclist in effect
becomes a human anti-lock braking machine, thus they must use both front
and back brakes.
Braking Force= 1362N
Rotor Diameter = 160mm
V- Brakearm length = 80mm
Stopping distance=d=v^2/ (2*X*g)
Velocity
(m/s)
Stopping
Distance
(m)
Braking
Force (N)
Deceleration
(m/s^2)
Stopping
Time (sec)
Braking
Torque
(Nm)
Braking
Power
2 0.33 1362 6.06 0.33 600 1770
4 1.35 1362 5.92 0.67 600 3540
6 3.05 1362 5.90 1.01 600 5310
8 5.43 1362 5.89 1.35 600 7080
10 8.49 1362 5.88 1.70 600 8855
12 12.23 1362 5.79 2.07 600 10620
21. 8 3 0.75 120.5114 2451.8 1471.08 10.66
9 3 0.66 254.4690 3105 1863 13.5
10 3 0.60 314.0336 3831.8 2299.08 16.66
11 3 0.54 380.0070 4636.8 2781.78 20.16
12 3 0.50 452.3893 5520 3312 24
Why is Brake Biasing necessary?-
Brake biasing is nothing but brakebalancing. Itindicates the relative amount of
pressureapplied to frontbrakes. E.g. 52% would indicate that the frontbrakes were
receiving 52% of the brakepressure& rear would be receiving 48%. A perfect brake
balance occurs when all the wheels of vehicle lock at the same time. It is required for
equal distribution of braking force.
Brake Fluids
Brake fluid plays an important role in braking function.
The 3 main types of brake fluid now available are DOT3, DOT4, DOT5.
Where, DOT stands for Departmentof Transportation.
DOT3 & DOT4 areglycol based fluids & absorb water while DOT5 does’nt.
0
2000
4000
6000
8000
0 5 10 15
Stopping
Distance(m)
stopping
time(sec)
Braking
Power(KW)
22. DOT5 is silicone based fluid.
Brake Calculations-
Clamp load=T/(r*X*n)
Where, T=torque
R=rotor diameter
N=no. of friction faces
X=Coefficient of friction
Required torque=70.014Nm
Clamp
Load=95.83N
Hence, assume disc diameter= 160 mm
FrontBrake Disc brakes
Rear Brake V-brake
Braking Force 1362N
Brake Energy 1329.4J
Brake Efficiency 81.54%
For Disc Brakes-
Diameter(mm)
Torque(Nm)
130 74.75
160 92
200 115
23. For V-brakes
Required torque=72.33N
Armlength(mm) Torque(Nm)
65 61.70
80 75.94
90 85.38
100 94.87
Hence, assume arm length= 80mm
Clamp load=75.34N
Brake Energy=mv^2/2=W*v^2/ (2*X*g)=(230*3.4^2)/2=1329.4J
,where, X=coefficient of friction
Brake efficiency= (Total brake force/vehicle weight)*100
= 81.54%
Stopping distance=d=v^2/ (2*X*g)
Where, X= coefficient of friction
Seat
Proper sitting contributes to the physical well being of a driver.
General Principles:
Rounding off the front of a chair avoids restriction of blood flow through the legs.
The seat itself should be reasonably flat in order to allow freedom of movement and to prevent
hip-joint pressure.
Padding that is too thick and soft can cause discomfort by immobilizing the legs.
Contents:
1. Ergonomy
2. Safety
3. Bucket seat and bench seat
4. Seat construction
5. Material
6. Climate control and ventilation
7. References
24. A. Ergonomy: Lumbar and thigh support
To get full efficiency while driving a vehicle say tricycle; ERGONOMICS plays an vital role;
the best area through which the driver feel comfortable and distinct is the region in which he or
she is placed in.
Lumbar and thigh support are the most predicted region to which an ergonomists should design
the seat such a way that one should feel comfortable; to achieve this inclination and such other
things are made while designing seat.
B. Safety:
A restraint system, also commonly referred to as a car seat, is a restraint which is secured to the
seat of an automobile equipped with safety harnesses or seat belts, to hold driver and passenger
in the event of a crash. As a safety equipment one can use seat belts, helmet, for eye protection –
goggles, elbow card, etc.
C. Bucketseatand Bench seat:
A bucket seat is a seat with a contoured platform to accommodate one person, distinct from
a bench seat which is a flat platform designed to seat up to two/three people.
D. Seatconstruction:
Parts:
1. Back rest
2. Heat rest
3. Seat base
4. Total thickness
Calculation is carried out taking into account of average dimensions of normal car seat and Moto-
sports car seat; and fitting it to the comfort level of a normal human being.
Seatbase:
Minimum seat length should be 14 - 15 inches (i.e. 35.56 - 38 cm)
Why to use this dimension;
2 drivers i.e. 2 seats required;
(2 * 38) + 30 = 106
= 90 cm . . . (if we use bench seat)
Total maximum width of cycle provided;
55 inch = 139.7 cm
Remaining clearance:
139.7 – 90 = 49.7
i.e. appro. 25 cm on both sides of cycle
Seat width approx. 17 inch = 43 cm . . . . at this width fatigue on driver is very low
Its angle from horizontal plane 7 degree . . . . to get the thigh at rest
In use: Bench seat; main reason why to use bench seat instead of bucket seat, according to
above calculation the overall length of bucket seat approaches near about 40 cm for each driver
i.e. 80 cm for both drivers and 25 cm clearance in between both seats to get the driver’s
movement while taking turns, for relaxing, etc
Therefore overall length comes to be 105 cm.
25. Now, if we design a bench seat of 90 cm it would be enough for both the driver to accommodate
and to restrain through fatigue.
From above both calculations, by taking into consideration of values there is saving of 15 cm in
overall length of seat if we use bench seat; which is directly or indirectly proportional to saving
of total weight and cost.
Back rest:
Ht of back rest normally used is 16 to 22 inch i.e. 45 to 55 cm
In use: 50 cm; this height is enough to support lumbar region and is convenient to make it more
comfortable.
Angle of back rest from seat base used normally is 105 to 115 degrees (seat pan angle)
In use: 110 degree (with horizontal); because in this position forces and stress acting on driver
will be minimum.
This acquires the concave portion of back’s lumbar region; comfortable and proper vision for
driver at this position and minimizing the fatigue level of driver.
Head rest:
Normally if provided we us 22 cm in width and its angle between back rest and back rest must
be 30 to 32 degree for proper vision and comfort.
Height will be near about 15 to 17 cm
In use: Width = 22 cm
Height = 15 cm
This height and width can be changed according to the driver comfort level.
Thickness:
In use: 7 cm
Padding that is too thick and soft can cause discomfort by immobilizing the legs. This is the best
thickness to achieve comfort.
Center of gravity:
X = 93.20 mm
Y = 162.01 mm
Z = 0.01 mm
This is decided form the CAD drawing which is provided below
E. Materialused:
Most car seats are made from inexpensive but durable material in order to withstand as much use
as possible. The most common material is polyester.
1. Foam sheet
Density = 40 +/-1
2. Memory foam
Use: cushions
F. Climate control and ventilation:
Some vehicles include the option of seat climate control (i.e. heating by seat warmers)
and ventilation.
27. Ergonomics
In the machine design, the machine is considered as an entity. In Reality, the man machine working
environment forms the system and this needs to be considered as a single unit.
28. By taking this into consideration, the parts are designed in such a way that the user does not get any
kind of strain in his body while operating the machine.
Purpose of ergonomics is to design equipments and working environments which fit into capacities,
needs and comfort of the user.
The goal of an ergonomics program is to ensure employees can work comfortably with their workplace
demands or tasks, thereby decreasing the risk of injury or illness.
Anthropometry
The workplace should be designed to accommodate the body size of the user. Anthropometry is the
measure of physical human traits that is applied to determine allowable space and equipment size and
shape used for the work environment.
The goal is to provide a workplace that is efficient, safe and comfortable for the worker.
Biomechanics
Biomechanics is the study of the structural elements of the human body in relation to how the
body functions and how much stress, acceleration and impact it can stand. Simply defined, it is the
application of the principles of mechanics to living biological material.
Types of Movements of Body Members
Positioning movements are those in which the hand or foot moves from one specific position to
another, such as when reaching for a control knob.
Continuous movements are those that require muscular control adjustments of some type during
the movement, such as when operating the steering wheel of a car or guiding a piece of wood
through a band saw.
Manipulative movements involve the handling of parts, tools and control mechanisms, typically
with the fingers or hands.
Repetitive movements are those in which the same movement is repeated. Hammering, using a
screwdriver and turning a hand wheel are examples of repetitive movements.
A static posture involves maintaining a body segment in a specific position for a period of time.
Levers
Distance between load and fulcrum is “load arm”
Distance between effort and fulcrum is “effort arm”
Law of equilibrium:
Load x Load Arm = Effort x Effort Arm
First type lever:
First-class levers have the fulcrum placed between the load and the effort.
29. Secondtype lever:
Second-class levers have the load between the effort and the fulcrum.
Third type lever:
Third-class levers have the effort placed between the load and the fulcrum.
30. Ergonomic Injuries / Illnesses
The most common types of ergonomic injuries and illnesses are musculoskeletal disorders (MSDs).
Employees may suffer ergonomic injuries/illnesses when work tasks include reaching, bending over,
lifting heavy objects, using continuous force, working with vibrating equipment, and/or performing
repetitive motions.
Causes of MSDs
Contact stress
Awkward postures
Forceful exertions
Repetition
Vibration
Ergonomic Goals:
Finding ways to make strenuous, often repetitive work, less likely to cause muscle and joint
injuries and still get the job done.
Keeping young bodies from wearing out prematurely, and mature bodies from giving out early.
Indication of ergo failure:
Awkward Postures
31. Being in these work positions for more than 2 hours total per day
– Hands above head
– Elbows above shoulder
– Back bent forward more than 30 degrees
– Neck bent more than 30 degrees
– Squatting
– Kneeling
High Hand Force
Highly Repetitive Motion
Repeated Impact
Heavy, Frequent or Awkward Lifting
Moderate to High Hand-Arm Vibration
How to reduce it . . . ???
ERGONOMIC PRINCIPLES THAT CONTRIBUTE TO GOOD
WORKPLACE DESIGN
The goal for the design of workplaces is to design for as many people as possible and to have an
understanding of the Ergonomic principles of posture and movement which play a central role in the
provision of a safe, healthy and comfortable work environment. Posture and movement at work will be
dictated by the task and the workplace, the body’s muscles, ligaments and joints are involved in
adopting posture, carrying out a movement and applying a force. The muscles provide the force
necessary to adopt a posture or make a movement. Poor posture and movement can contribute to local
mechanical stress on the muscles, ligaments and joints, resulting in complaints of the neck, back,
shoulder, wrist and other parts of the musculoskeletal system.
Some tips to control ergonomics failure:
1. Seating arrangement:
Almost 50 percent of workers in the industrial world are thought to suffer from back problems.
Many back problems originate from improper sitting positions. Complications that may arise
from poor seating conditions
2. Working area:
Most of the efficiency increases by arranging the working area according to the ergonomics
rules; the comfort level of the worker increases as he or she feels the less stress acting on the
body.
Parts Value Reason
Distance of steering wheel
from back rest of seat
550 mm According to the principles of
ergonomics; riders arm must
be attached with body so
stress, strain acting on them
must be minimum.
32. Distance of steering wheel
from chassis
750 mm Perfect steering handling
position for driver; whenever
needed he/she can put their
weight on wheel and can pedal
with more force.
Elbow angle of rider 100° – 110° Avoids pressure acting on
hands
Distance of pedal center from
seat base corner end
450 mm Stress on thigh is less.
Leg angle with pedal
disengaged
120° – 130° This angle is most stable for
driver to put his energy to get
more and more displacement
of cycle.
Safety
Automobile safety is the study and practice of design, construction, equipment and regulation to
minimize the occurrence and consequences of automobile accidents.
Types:
1. Active safety is used to refer to technology assisting in the prevention of a crash
a. Good visibility form driver’s seat
b. Good chassis balance and handling
c. Collision warning/avoidance
2. Passive safety to protect occupants during and after a crash.
a. Passenger safety cell
b. Seat belts
c. Emergency medical service
Phase of accident:
34. From figure one can easily understand the most of the impact on every vehicle occurs or take
place at front side; the safety precaution one can make calculation and have the result by providing a
proper element for safety.
There are mainly two types of impact i.e. pitching and rollover.
When impact is done on the outside area of the vehicle and after or during impact the vehicle/ car tends
to move in one direction as that of the impact force direction then that impact is known as “pitching
impact”.
Here 97% - 97.2% accident leads to pitching impact.
When impact is done on the outside area of the vehicle and after or during impact the vehicle/ car tends
to rollover its C.G. then that impact is known as “rollover impact”.
Only 2.8% - 3% accident leads to rollover impact.
Elements for safety:
a. Helmet
b. Eye Protection
c. Seat belts
d. Jacket
e. Gloves
f. Boots
g. Head lights
h. High ground clearance
i. Mud-guards for every wheel
j. Chain covers
k. Insulation to electric wires
l. Horn
m. Mirror
A. Helmet:
A motorcycle helmet is designed to absorb the impact of a blow
35. B. Head light, horn, mirror:
These are also known as accessory part of vehicle. These are allocated to known the vehicle that
is approaching us or vehicle that is ahead us; so that we can indicate them
to avoid accident.
C. Insulated electric wires:
One of the basic principles while using electric equipment is that all the circuits must be
grounded and wires used must be insulated. Naked wires are very dangerous and have power to
injure a human being badly. Taking this into consideration safety level can be increased.
D. Eye Protection:
As we know that eye is one of the most precious part of human body; to protect it from foreign
particle (dust, etc) use of eye protection is done while driving vehicle. Proper vision is most
needed to avoid accident.
36. E. Seatbelts:
One of the most effective equipment with stand with driver/passenger during collision; it tries to
keep the driver in stationary and avoid impact of driver to any component. Mostly all the accident
impact on front side; so in this case this must withstand the forces.
F. Elbow pad:
G. Knee pad: