Dokumen ini membahas tentang visualisasi pergerakan kendaraan di kota Malang menggunakan metode Depth First Search (DFS). Hasil uji coba menunjukkan bahwa metode ini dapat dengan akurasi 100% menentukan rute perjalanan kendaraan berdasarkan data yang di input. Penelitian ini bertujuan untuk menciptakan sistem transportasi yang lebih efektif dan efisien dengan memperhatikan kondisi lalu lintas yang ada.


![Gambar 2. Visualisasi permukaan tanah meliputi jalan dan bangunan
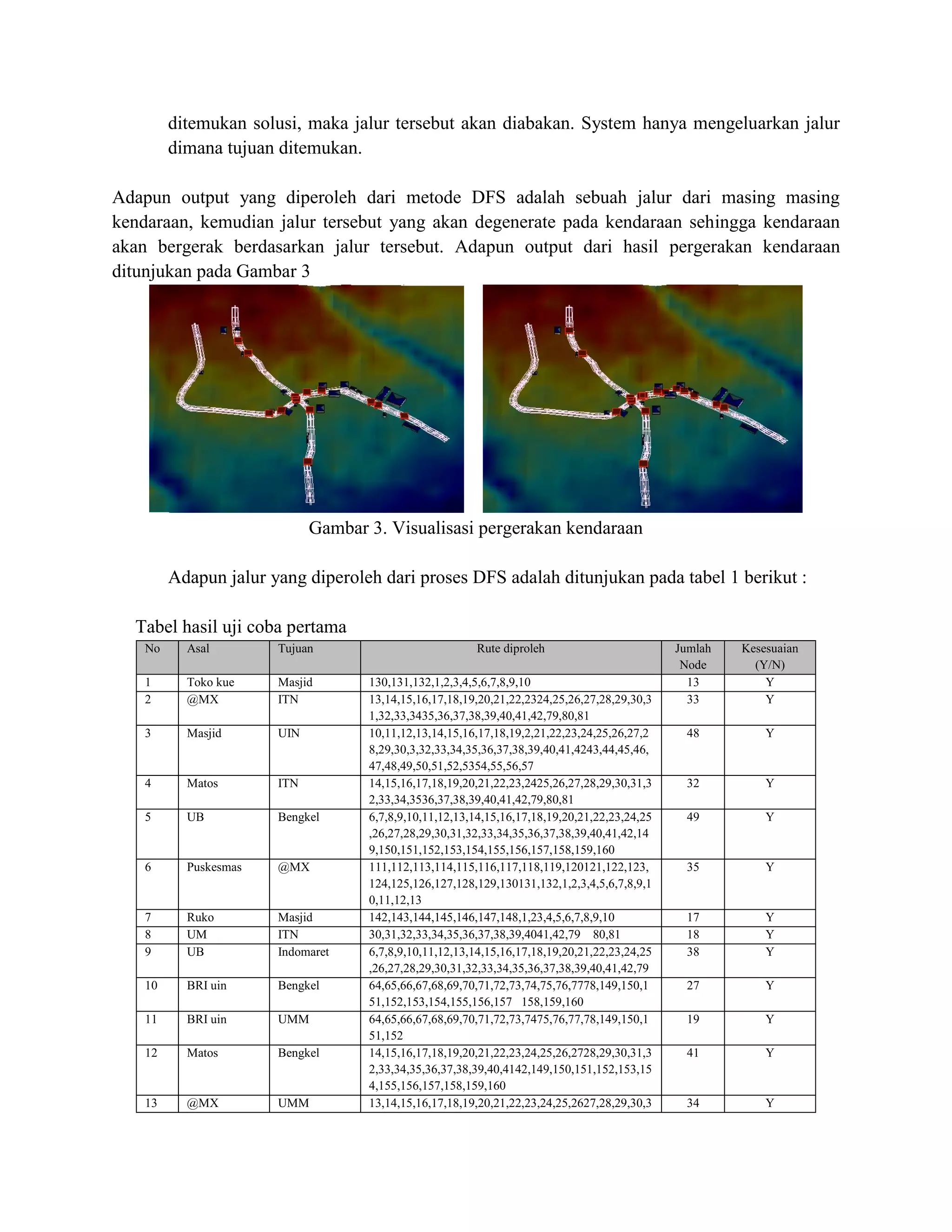
Selanjutnya adalah melakukan visualisasi pergerakan kendaraan pada area seperti
ditunjukan pada Gambar 2. Dimana mobil akan/harus bergerak berdasarkan jalan yang telah
dibangun da nasal tujuan berdasarkan bangunan yang tersedia, dimana proses pergerakannya
berdasarkan arah panah yang telah ditentukan seperti ditunjukan pada Gambar 1. Proses
pergerakan kendaraan melibatkan data bangunan dan jalan, dimana pertama kali adalah
memberikan asal dan tujuan pada kendaraan, adal dan tujuan diperoleh dari bangunan. Kemudian
adalah proses pergerakan kendaraan berdasarkan asal kendaraan yang telah di inputkan, untuk
mencari rute pergerakan jalan, peneliti menggunakan metode Depth Fisrt Search (DFS). DFS
merupakan algoritma pencarian buta, dimana prosesnya adalah [masalah][proses][solusi], ketika
solusi telah ditemukan maka proses selsai. Tidak ada tambahan aturan pada proses pencarian
menggunakan DFS. Adapun proses pencarian menggunakan DFS yang dilakukan pada aplikasai
ini adalah sebagi berikut :
1. Inisialisasi asal dan tujuan kendaraan
2. Menemukan asal pada node yang sudah terbentuk susunannya
3. Mendeteksi banyak cabang yang diperoleh dari titik asal kendaraan. Pada proses ini
setiap kendaraan akan menemukan kondisi cabang yang berbeda, masing masing
berdasarkan asal kendaraan yang ditemukan berdasarkan inisialisasi asal.
4. Setelah menenukan susunan cabang, system akan mengunjungi masing masing cabang
secara urut berdasarkan urutan kindisi cabang. Dalam hal ini DFS akan mengunjungi
cabang pertama dan node node dibawahnya sampai pada ujung node cabang pertama.
Jika sampai ujung node cabang pertama tidak ditemukan tujuan, maka DFS akan
melanjutnkan mengunjungi cabang kedua sampai node ujung cabang kedua dan
seterusnya sampai tujuan diperoleh.
5. Ketika sudah memperoleh tujuan, maka system akan mengeluarkan jalur yang sesuai
dengan asal dan tujuan, dimana jika ketika dia mengunjungi cabang namun tidak](https://image.slidesharecdn.com/visualisasipergerakankendaraanbermotormenggunakanmetodedepthfirstsearchdfs-161121051854/75/Visualisasi-pergerakan-kendaraan-bermotor-menggunakan-metode-depth-first-search-dfs-4-2048.jpg)