Download to read offline
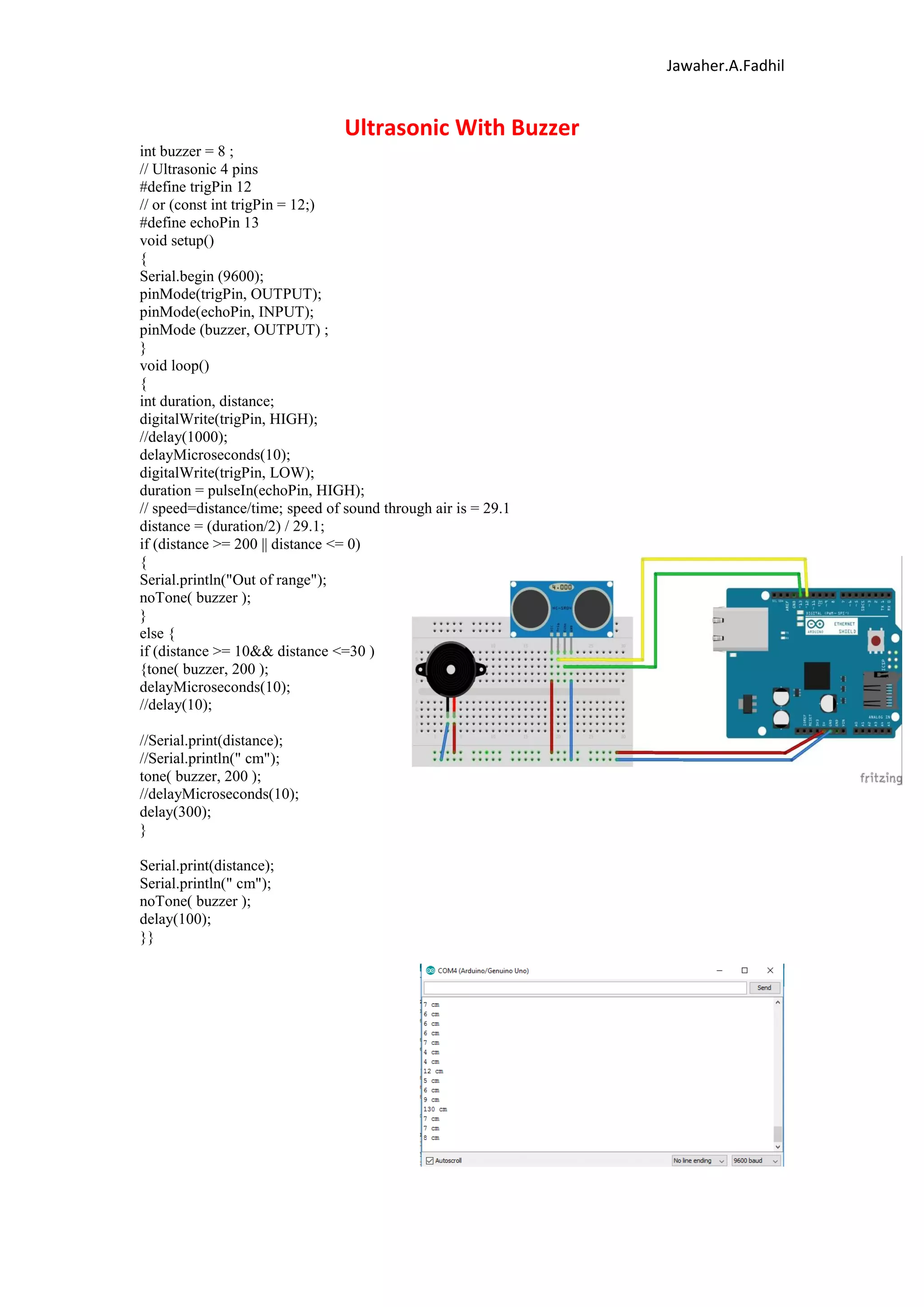

This code uses an ultrasonic sensor and buzzer to measure distance. It defines the trigger and echo pins for the ultrasonic sensor and the buzzer pin. In setup, it initializes the pins and Serial communication. In loop, it uses the ultrasonic sensor to measure distance, sounds the buzzer for distances between 10-30cm, and prints the distance to Serial.