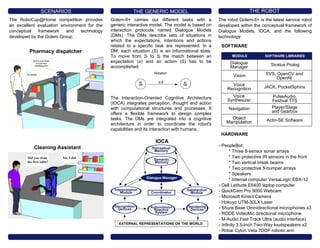
The document describes the golem-ii+, a service robot designed for various tasks using a cognitive architecture called interaction-oriented cognitive architecture (IOCA), which integrates dialogue models to coordinate human-robot interaction. The robot is equipped with multiple sensors and software tools, enabling it to listen to instructions, navigate, recognize objects, and recover from errors during interactions. Developed by the Golem Group, the system aims to provide a flexible and efficient framework for managing robotic behaviors in diverse environments.












![Congreso diputados diario de sesiones[1]](https://cdn.slidesharecdn.com/ss_thumbnails/congresodiputadosdiariodesesiones1-151101121828-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
























