Abstract
Congestion intraffic is a serious issue . In existing system signal timings are
fixed and they are independent of traffic density,
Large red light delays leads to traffic congestion.
In this project, Video based traffic estimation system is implemented in
which signal timings are updated based on the vehicle counting.
This system consists of Deep Learning module it detect the vehicle count of
the current system and sends to the traffic signal.
Based on traffic density of Vehicle System will Predict the Traffic
Congestion.
3.
INTRODUCTION
Almost allurban cities in the world use traffic light signals to control the
traffic on the roads.
Different types of traffic light control systems are developed which are
vehicle actuated lights and static traffic lights.
But their traffic lights timing are fixed and switching patterns are also
predefined in the system it is independent of traffic conditions for the
different lanes and they are not changing with real time data.
4.
OBJECTIVES
Objectives Eliminateof frequent traffic disconnect of Road network.
Act as Road side Unit as server.
Implementation of Ambulance Priority system.
5.
EXISISTING SYSTEM
Inexisting system human and Automatic based traffic light Control system
system only mostly in use.
Also some of the sensor based Traffic monitoring also used.
These techniques are having huge drawbacks.
6.
PROPOSED SYSTEM
Thissystem proposes a new system for predicting the traffic Density by
image processing using AI module.
A camera will be installed alongside the traffic light.
It will capture image sequences.
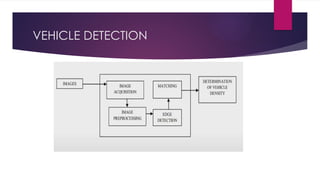
The image sequence will then be analyzed using digital image processing
for vehicle detection, and according to traffic conditions on the road,
traffic Density can be Estimated.
7.
PROPOSED SYSTEM
Thissystem employs YOLOV5 and AlexnetNet v_{3} Convolutional neural
network pre-trained model to accurately detect the number of vehicles
present on the road, Average Vehicle Area and identify emergency
vehicles in real-time.
Using this information, this system can dynamically adjust traffic signals and
reroute vehicles to minimize congestion and ensure priority access for
emergency vehicles.
8.
DISADVANTAGES
That humanbased system need huge manpower in the form of traffic
Police.
Less accuracy of processing sensor signals.
Prone to Sensor and Man Made errors which leads to system efficiency
drop.
9.
LITERATURE
SURVEY
SURVEY AUTHOR YEAREXPLANATION
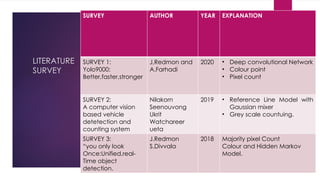
SURVEY 1:
Yolo9000:
Better,faster,stronger
J,Redmon and
A.Farhadi
2020 • Deep convolutional Network
• Colour point
• Pixel count
SURVEY 2:
A computer vision
based vehicle
detetection and
counting system
Nilakorn
Seenouvong
Ukrit
Watchareer
ueta
2019 • Reference Line Model with
Gaussian mixer
• Grey scale countuing.
SURVEY 3:
“you only look
Once:Unified,real-
Time object
detection.
J.Redmon
S.Divvala
2018 Majority pixel Count
Colour and Hidden Markov
Model.
10.
IMAGE ACQUISITION MODULE
Image Acquisition Module Image acquisition is done by using an external
Video.
In this project, the operating system used is LINUX which is an open source
software that is prone to frequent changes.
11.
IMAGE PREPROCESSING MODULE
Image preprocessing functions are imported from Python OPEN CV
libraries and is included in final python program.
This will automatically process the image when the program is invoked.
OBJECT DETECTION MODULE
Among the key features of an image i.e. edges, lines, and points, we have
used edge in our present work.
Here we are using object detection method for image matching.
Object detection methods locate the pixels in the image that correspond
to the shape of the objects seen in the image.
The result is a binary image with the detected Object.
14.
VEHICLE COUNTING MODULE
Vehicle Count Initially reference image of an empty road is stored in
memory.
The captured images at the four lanes are then compared with the
reference image to determine the vehicle density using Object Detection
Module
15.
HARDWARE
REQUIREMENTS
System :
Hard Disk :
Monitor :
Input devices :
Ram :
SOFTWARE REQUIREMENTS :
Python Language
Anaconda IDE
Pentium Dual Core
120 GB.
15” LED
Keyboard,Mouse
4 GB
16.
ADVANTAGES
The processis in real time so in can able to detect from the video stream
from live Camera.
The implementation of this approach runs at 30-40 frames per second, so
that it can detect the vehicle very quickly.
It uses low power processor with 2.4 GHz by using that we can able to
achieve low power operation.
17.
Light Control Module
After vehicle detection procedure both reference and real time images
are matched and traffic lights can be controlled based on percentage of
matching.
If the matching is between o to 10% - green light is ON for 90 seconds.
If the matching is between 10 to 50% - green light is ON for 60 seconds. If
the matching is between 50 to 70% - green light is ON for 30seconds.
If RF Signal Received from Ambulance it will Open the Green Signal
Always for Ambulance Passing
18.
FUTURE ENHANCEMENT
Higherversions of raspberry pi can be used for reducing the processing
time
Timer system can also be incorporated
While determining vehicle density if the number of vehicles on any
particular side is always less, then each time the lane will be neglected
and the waiting time of vehicle on that particular lane will be high.
For future expansion this has to be considered
19.
CONCLUSION
This projecttries to introduce a new method for traffic Estimation based on
vehicle density, which is found to be very efficient method.
As opposed to digital image processing using bulky computers, this
method use AI module, a microcomputer for image processing which
greatly reduces the space and processing time.
To determine traffic density different object detection techniques can be
used.