Traffic Sign Recognition (TSR) is an essential component in the development of intelligent transportation systems, particularly within the domains of Advanced Driver Assistance Systems (ADAS) and autonomous vehicles. With the advent of deep learning technologies and, specifically, Convolutional Neural Networks (CNNs), the performance and reliability of TSR systems have been significantly enhanced. This paper presents an in-depth exploration of the concept, design, implementation, and future prospects of traffic sign recognition using CNNs. Traffic signs are visual cues designed to guide, warn, or regulate road users. These signs are critical to ensuring the safety and efficiency of road transportation, and their recognition by autonomous systems is vital for real-time decision-making. Unlike traditional computer vision methods which relied on handcrafted features and heuristic rules, CNNs offer a data-driven approach that can automatically learn hierarchical features directly from raw image data. The rise in computing power, availability of large labeled datasets such as the German Traffic Sign Recognition Benchmark (GTSRB), and the refinement of deep learning algorithms have collectively contributed to the proliferation of CNN-based TSR systems.
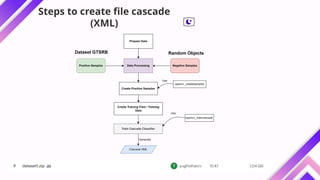
A CNN-based traffic sign recognition system typically follows a multi-stage pipeline. The initial step involves data acquisition, which entails collecting and curating images of traffic signs from real-world environments. This data often contains noise, occlusions, varying lighting conditions, and different resolutions. Preprocessing the raw images is crucial; it includes resizing the images to a consistent dimension (commonly 32x32 or 64x64 pixels), normalization to standardize pixel values, and augmentation to artificially increase the diversity of the training dataset. Augmentation techniques such as rotation, scaling, brightness adjustment, and flipping help improve the robustness of the model and reduce overfitting. Once the data is prepared, it is divided into training, validation, and test sets.
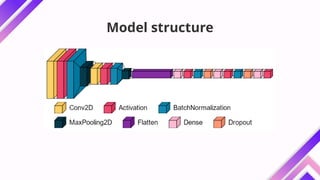
The CNN architecture is the core of the TSR system. A typical CNN for traffic sign recognition may consist of multiple layers, including convolutional layers that apply filters to capture spatial hierarchies, activation layers such as ReLU (Rectified Linear Unit) that introduce non-linearity, pooling layers like max pooling that reduce the spatial dimensions while retaining important features, and fully connected layers that aggregate the learned features for final classification. The final layer is usually a softmax layer that outputs a probability distribution over the set of traffic sign classes. The number of filters, kernel sizes, stride values, and dropout rates are hyperparameters that can be tuned to optimize performance. Optimization algorithms such as Adam or SGD (Stochastic Gradient Descent) are used to minimize the loss function.