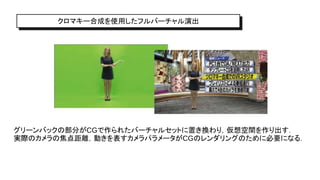
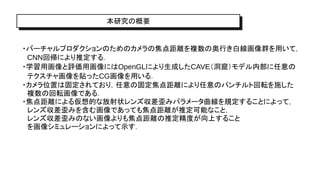
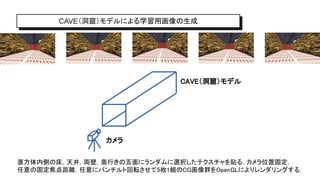
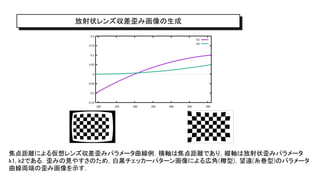
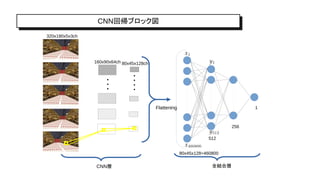
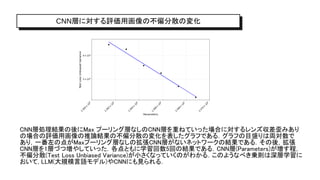
バーチャルプロダクションのためのカメラの焦点距離を複数の奥行き白線画像群を用いて,CNN回帰により推定する.学習用画像と評価用画像にはOpenGLにより生成したCAVE(洞窟)モデル内部に任意のテクスチャ画像を貼ったCG画像を用いる.カメラ位置は固定されており,任意の固定焦点距離により任意のパンチルト回転を施した複数の回転画像である.焦点距離による仮想的な放射状レンズ収差歪みパラメータ曲線を規定することによって,レンズ収差歪みを含む画像であっても焦点距離が推定可能なこと,レンズ収差歪みのない画像よりも焦点距離の推定精度が向上することを画像シミュレーションによって示す.

![実画像実験例
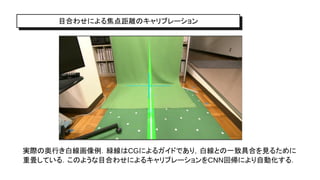
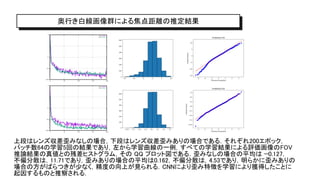
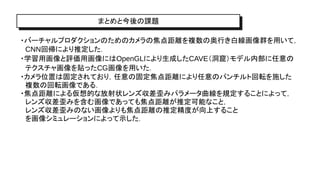
目合わせによるキャリブレーション済みの実際のカメラを用いて撮影した5枚の奥行き白線画像により
キャリブレーションを行った.CNN回帰の学習には実際のカメラのレンズ収差歪みパラメータ曲線に
基づき,Brainstorm社eStudioによりCG画像をレンダリングしたものを用いた.焦点距離の推論結果
は,拡張CNN層を5層としたときに,水平FOV[deg]として 60.162であり,目合わせによる結果は
59.888 であった.Zhangの方法を用いると,61.521であった(カメラの焦点距離はそのままに,チェス
ボードパターンを撮影したHD入力画像5枚から推定した).](https://image.slidesharecdn.com/fovcnnslide-251117072942-45529e3f/85/SSII2025-CNN-10-320.jpg)








![[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerf20200327slideshare-200326131430-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)



























