More Related Content

PPTX

PDF
Smart Sensors on the other side of thish 
PPTX
الکترونیک - پریزنتیشن کامل و تفصیلی.pptx 
PDF

PPT

PPTX

PPTX

PDF
Similar to SONIC

PDF

PPTX

PPTX

PPTX
Accelerometer vibration sensoe discrip.pptx 
PPTX
smart antennaفناوری آنتن های هوشمندppp// 
PPT
mohithaye_chand_resanei.ppt ldkfjd lksdf lkdfj 
PPTX

PPTX

PPTX

PPTX

PPTX

PPTX
شبکه های حسگر بی سیم Wireless Sensor Networks 
PPTX

PDF
Mems Accelerometer Techniques 
PDF

PDF

PDF

PDF

PDF
Hotel BTS (Mohammad Reza Khodabakhshi) 
PDF
Sharknose Technology - Fa SONIC
- 1.
- 2.
فهرست
مطالب:
امواج بر ایمقدمهالتراسونیک
معرفیسنسورالتراسونیک
تاریخچه
تکنولوژی کاربردالتراسونیک
مزیت/ضعفسنسورهایالتراسونیک
برخی معرفیماژولهایالتراسونیکبازار در موجود
معرفیسنسورHC-SRF04
فنی مشخصات
عملکرد طرزسنسور
با سنج مسافت طراحیسنسورHC-SRF04
الگوریتمبرنامه اجرای
سورسبرنامه کد
- 3.
امواج رالتراسونیک:
کلمهآلتراسونیکUltrasonicمعنای بهفراصوتاست.
انسانشنوایی فرکانس محدوده20هرتزتا20هزار
هرتزاست.امواج فرکانسی محدودهفراصوت40کیلو
هرتزچندین تامگاهرتزمیباشد.امواجفراصوت،
تخلیه ،لیزر در جمله از فراوانی کاربردهای
بار نرخ افزایش و سطحی خواص بهبود برای الکتریکی
ظروف دقیق شستشوی ،مخزن عمق ،فاصله سنجش ،برداری
مواد کردن همگن ،بیمار خون فشار تعیین ،آزمایشگاهی
،مذابجوشکاری،گری ریخته ،جنس هم غیر مواد
تراشکاری،فرزکاری،سوراخکاریدارند غیره و.
- 4.
- 5.
فناوری این ازتوانمیدرگیریاندازهوسرعتجهت
بادکرد استفاده مخزن یک بودن پر میزان یا.برای
گیریاندازهچندین از دستگاه یک ،جهت و سرعت
استفاده گیرندهکندمیروی از وفاصلهآنها نسبی
اندازه را سرعتگیردمی.برایگیریاندازهمیزان
مایع سطح از فاصله کافیست نیز مخزن یک داخل مایع
شود گرفته اندازه.شامل دیگر های کاربردردیابهای
صوتی(sonar)،بخورها((humidifier،سونوگرافیفراصوت،
سنسورو پارکدزدگیرهاشودمی.
- 6.
و فرستنده ازمعمول طور بههاییگیرندهاستفاده
شودمیامواج صوتی به الکتریکی انرژی تبدیل با که
از باالتر صوتی۲۰کیلوهرتزایجادکنندمیبا و
انرژی به دیگر بار را صوت امواج بازتاب دریافت
تبدیل الکتریکیکنندمیقابل تاگیریاندازهو
باشند نمایش.شکلهای فناوری این عمده مشکالت
است مواد غلظت یا چگالی و اجسام سطوح گوناگون.
عمل این مایع یک سطح در کف وجود مثال عنوان به
مختل راکندمی.
- 7.
تاریخ
چه:تاریخچهاینسنسورسال به1912
کشتی شدنغرق از بعد و میالدی
تایتانیکگردد می بر.
شدن غرق از بعدتایتانیک
راه دنبال به دانشمندانحلی
فاجعه این نشدن تکرار برای
کشتی کاپیتان اگر که ،افتادند
جلو دیدن به قادر دلیلی هر به
دهنده هشدار ای وسیله نبود کشتی
سازد مطلع مانع وجود از را او.
سال در1912آقای میالدیL F
Richartsonو طبیعت از الهام با
از استفادهمسیریابیخفاشها
- 8.
- 9.
- 11.
- 13.
- 15.
مزیت/ضعفسنسورهای
التراسونیک:
با تماس بدونتشخیص
جسم
پاسخسنسوروابسته
شفافیت ،رنگ به
اشیاءانعکاس خواص ،
سطح بافت یا و نوری
نیست جسم
سنسورالتراسونیکمی
شرایط در تواند
و خاک مانند بحرانی
کند کار غبار و گرد
کوچک حتی دقیق تشخیص
اجسام ترین
مزی
ت
- 16.
اینسنسورفاصله یک دارای
کهباشد می حداقل سنجش
انتخاب زمان بایدسنسور،
شود گرفته نظر در
می محیط در تغییرات برخی
پاسخ تواندحسگرتحت را
دهد قرار تاثیر(مثل:
و دما ،رطوبت)...
دقیق پاسخ برایسنسور
باال چگالی با سطحی باید
ببیند را.نرم سطح یک
مانندفومدارای پارچه و
جذب قابلیت و کم چگالی
شده منتشر صوتی امواج
توسطسنسورباشد می
نادرستی پاسخ تواند می
بلند صداهای از برخی برای
باشد داشته
ضعف
- 17.
- 18.
SRF02
•دارایالگوریتم
تنظیم جهت هوشمند
سنسورکسببرای
دقت بهترین
•به زمان تبدیل قابلیت
های واحدمسافت
•و سلایر اتصالI2C
•کاربرددر گسترده
رباتیکدقت دلیل به
اندازه و باال
SRF05
•آسان کاربرد
•قیمتپایین
•پایه وجودout
•قابلیتاستفاده
مد دو درکاری
•سیگنال خروجی
آنالوگسینوسی
SRF08
•دقت تنظیم قابلیت
گیری اندازه
•دارایسنسورنوری
•به زمان تبدیل قابلیت
مسافت های واحد
•باال برد
•اتصالI2C
•در گسترده کاربرد
رباتیکدقت دلیل به
باال
- 19.
معرفیسنسورHC-SRF04:
سنسورالتراسونیکHC-SR04مانند
و ها خفاشدولفینامواجاز ها
فراصوتفاصله گیری اندازه برای
کند می استفاده اشیا تا.این
سنسوربدون و دقیق سنجی فاصله
یک در را تماسپکیجبه ساده
دهد می ارائه کاربر.
این دامنهسنسوربین2تا400
به آن عملکرد و بوده متر سانتی
اشیا رنگ یا و خورشید نور وسیله
قرار تاثیر تحتنمیگیرد.
ماژولاینسنسورگیرنده همراه به
- 20.
فنی مشخصات:
تغذیه منبع:5+ولتمستقیمجریان
تغذیه جریان:15آمپر میلی
برد:2-400متر سانتی
دقت:0/3متر سانتی
گیری اندازه زاویه:30درجه
پالس عرضتریگرورودی:10میکروثانیه
خروجی:سیگنالسینوسی
ابعاد:15*20*40متر میلی
ها پایه:Vcc,trig,echo,gnd
- 21.
- 22.
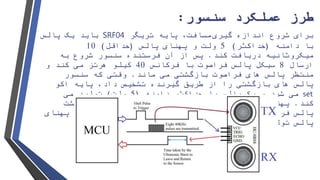
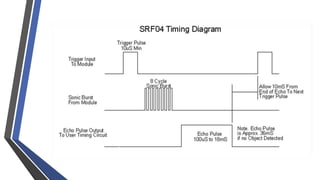
عملکرد طرزسنسور:
گیری اندازهشروع برایپایه ،مسافتتریگرSRF04پالس یک باید
دامنه با(حداکثر)5و ولتپپالس هنای(حداقل)10
میکروثانیهکند دریافت.فرستنده آن از پسسنسوربه شروع
ارسال8پالس سیکلفراصوتفرکانس با40کیلوهرتزو کند می
های پالس منتظرفراصوتماند می بازگشتی.که وقتیسنسور
پایه ،داد تشخیص گیرنده طریق از را بازگشتی های پالساکو
setدامنه حداکثر با پالس یک و شود می(5ولت)می تولید
کند.پالس پهنای(پالس دوره)بازگشت و ترک زمان مدت به
پالسفراصوتدارد بستگی.پهنای باید مسافت آوردن بدست برای
پایه توسط شده تولید پالساکوشود می گیری اندازه.
- 23.
با سنج مسافتطراحیسنسور
HC-SRF04:
قطعاتنیاز مورد اصلی:
Ultrasonic HC-SR04 Sensor
LCD 2*16
ATmega32 AVR
Microcontroller
- 24.
- 25.
- 26.
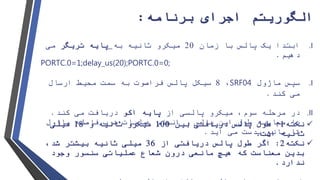
الگوریتمبرنامه اجرای:
.Iزمان باپالس یک ابتدا20به ثانیه میکروپایهتریگرمی
دهیم.
PORTC.0=1;delay_us(20);PORTC.0=0;
.IسپسماژولSRF04،8پالس سیکلفراصوتارسال محیط سمت به
کند می.
.IIمیکرو ،سوم مرحله درپالسیازپایهاکوکند می دریافت.
فاصله ضرب عملیات انجام و پالس این طول محاسبه باماژول
آید می بدست مانع تا.
نکته1:بین دریافتی پالس طول100و ثانیه میکرو18میلی
است ثانیه.
نکته2:اگراز دریافتی پالس طول36ثانیه میلی،شد بیشتر
عملیاتی شعاع درون مانعی هیچ که معناست بدینسنسوروجود
ندارد.
- 28.
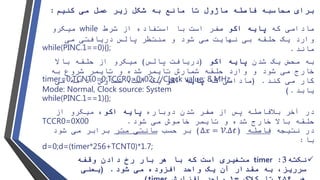
فاصله محاسبه برایماژولکنیممی عمل زیر شکل به مانع تا:
که مادامیپایهاکوشرط از استفاده با است صفرwhileمیکرو
می دریافتی پالس منتظر و شود می نهایت بی حلقه یک وارد
ماند.while(PINC.1==0){};
شدن یک محض بهپایهاکو(پالس دریافت)میکروباال حلقه از
خارجشمارش حلقه وارد و شود میتایمرشدهوتایمربه شروع
کارکند می( .مادامیکهپایهاکومی ادامه شمارش ،است یک
یابد).
timer=0;TCNT0=0;TCCR0=0x02; //Clock value: 8 MHz,
Mode: Normal, Clock source: System
while(PINC.1==1){};
نتیجه درفاصله(∆𝓍 = 𝒱.∆𝓉)حسب برمتر سانتیشود می برابر
با:
d=0;d=(timer*256+TCNT0)*1.7;
دوباره شدن صفر از پس بالفاصله آخر درپایهاکو،از میکرو
و شده خارج باال حلقهتایمرشود می خاموش.TCCR0=0X00
نکته3:timerوقفه دادن رخ بار هر با که است متغیری
شود می افزوده واحد یک آن مقدار به ،سرریز( .یعنی
- 29.
- 30.
- 31.




















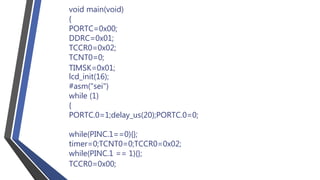
![سورسبرنامه کد:
#include <mega16.h>
#include <delay.h>
#include <stdlib.h>
#asm
.equ __lcd_port=0x1b
#endasm
#include <lcd.h>
int timer;
float d = 0.0;
char str[20];
interrupt [TIM0_OVF] void timer0_ovf_isr(void){TCNT0=0;timer++;}](https://image.slidesharecdn.com/a542849e-aa33-485e-a852-a5d506c0f7c4-160105154528/85/SONIC-29-320.jpg)