逢 甲 大學
自動控制工程學系碩士班
碩 士 論 文
以 SimMechanics 建模備有簡易力量模
型與仿生式控制器之移動機器人
The Use of SimMechanics for Modeling The
Mobile Robot with A Simple Force Model and A
Biologically-Inspired Controller
指導教授:林南州
學 生:廖哲偉
中 華民國一百零三年六月
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
Abstract
This thesis mainly describes the dynamical model for a hexapod robot which is a
product of Parallax. The model is built by using Simulink with add-on SimMechanics
which provides a multibody environment for 3D mechanical systems. A simple force
model is employed for the purpose of simulating the reaction between legs and
ground and a biologically-inspired controller is also incorporated in order to make the
robot imitate walking characteristics of insects. Through the simulation of the model,
it provides informations of displacements, velocities, posture angles as well as ground
reactions. Two common insects gait patterns, high-speed tripod gait and low-speed
metachronal gait, are chosen. The simulation results are used to validate the model
and, then, proceed to analyze the characteristics for each gait pattern.
Keywords: SimMechanics, hexapod, reaction
iii
逢甲大學e-Theses & Dissertations (102 學年度)
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
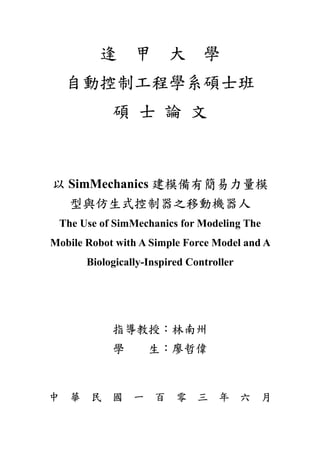
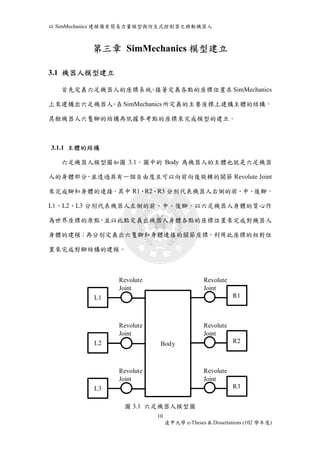
每一隻腳另有垂直旋轉一個自由度,圖2.6為說明垂直旋轉自由度,其中腳
的實體圖如圖2.7 所示,AB、BC、CD 和DE、EF、FG 桿件為兩個四連桿機構,
HI 桿件作為腳和地面接觸的部分,透過伺服機驅動AB 桿件,因其連桿原理,
進而使HI 桿件做向上向下運動,來達到六足機器人每隻腳做抬起、放下的動作。
圖2.6 六足機器人垂直旋轉示意圖
圖2.7 腳的實體圖
7
逢甲大學e-Theses & Dissertations (102 學年度)
C
A B
D
E
F
G
H
I
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
Entry
地面下腳在地面上
地面上或地面下?
Return
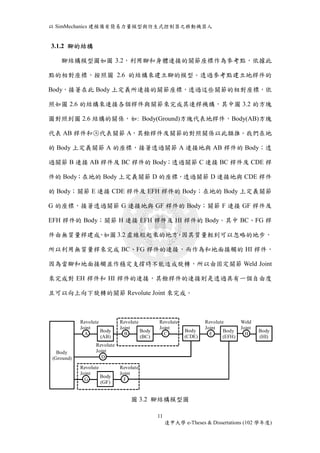
腳有接觸地面;
利用簡易力量模型計算腳與地面之間
的反作用力
圖3.4 狀態判斷
腳沒有接觸地面;
腳與地面之間反作用力為0
若是腳和地面有形成接觸,則把腳對地面的運動視為是一種球體對地面運動
的情況,將球體當成一個點,而點對地面的相對運動形成一個點對點的接觸運動,
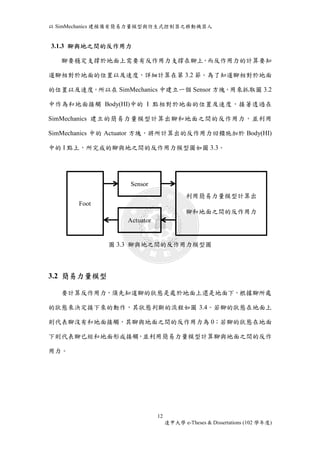
此項運動為一項三維的空間運動,我們把地模擬為一個具有彈簧、阻尼的系統,
其X、Y、Z 方向皆具有彈簧、阻尼,如圖3.5 所示,圖中P 為腳和地面接觸的
接觸點,PFoot 為當前腳的位置,透過與地面接觸點的位置、穿透深度和當時腳的
速度VFoot,以及地面給予的彈性和阻尼性能作用在接觸點的關係來得到其反作
用力,如式(3.1),其中KGround 為地面的彈性係數,CGround 為地面的阻尼係數,其
13
PFoot
逢甲大學e-Theses & Dissertations (102 學年度)
流程如圖3.6。
P
圖3.5 X、Y、Z 方向的彈簧阻尼系統
X
Z Y
Leg
PFoot
24.
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
()
( )
( )
× ×
- -
- -
- -
F K P P C V
FootX Ground X FootX Ground FootX
= = × ×
F F K P P C V
Foot FootY Ground Y FootY Ground FootY
× ×
F K P P C V
FootZ Ground Z FootZ Ground FootZ
Entry
利用彈簧、阻尼來計算腳
與地面之間的反作用力
Return
圖3.6 計算反作用力
而腳和地面接觸的過程中,還要考慮是否有打滑的情況發生,所以不光是計
算反作用力,還需計算水平力及最大靜摩擦力,接著判斷水平力是否有大於最大
靜摩擦力,以此判斷來作為是否有發生打滑的依據,水平力FFootHorMag 的算法如
式(3.2),最大靜摩擦力SFriction 算法如式(3.3),其中s m
正向力。如果水平力大於最大靜摩擦力,表示腳與地面之間有滑動現象,此時X、
Y 方向反作用力不等於式(3.1),而是動摩擦力;另外,也必須計算滑動後新的接
F = F 2+F 2 (3.2)
14
(3.1)
為靜摩擦係數,FFootZ 為
逢甲大學e-Theses & Dissertations (102 學年度)
觸點P,其流程如圖3.7。
FootHorMag FootX FootY
= × s FootZ SFriction m F (3.3)
25.
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
計算水平力、最大靜摩擦力
Yes No
水平力>最大靜摩擦力
發生打滑; 沒有發生打滑
修正X、Y方向的反作用力及接觸點P
圖3.7 判斷腳是否打滑
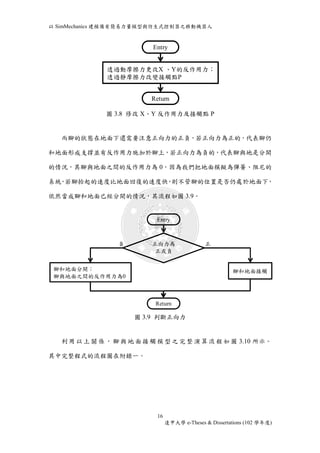
若腳發生打滑則需要修正X、Y 方向的反作用力和接觸點P,而這時我們的
X、Y 方向的反作用力FFootX 及FFootY 要依據我們的動摩擦力來做更改,而動摩擦
F = cos KFriction
F = sin KFriction
q
q
P = P + cos SFriction / K
P = P + sin SFriction / K
15
逢甲大學e-Theses & Dissertations (102 學年度)
力KFriction 算法如式(3.4),其中k m
為動摩擦係數,修正FFootX 及FFootY 的算法如
式(3.5),其中q 為水平力FFootHorMag 和X 軸的夾角,並且接觸點P 則需要依靠靜
摩擦力來做更改,因為我們使用的模型具有阻尼的特性,所以接觸點P 不能以動
摩擦力作為更改的依據,而是仍要透過靜摩擦力來更改我們的接觸點P[22],如
式(3.6)所示,其流程如圖3.8。
KFriction =mk ×FFootZ (3.4)
×
×
FootX
FootY
q
q
(3.5)
×
×
X FootX Ground
Y FootY Ground
(3.6)
Entry
Return
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
參考文獻
[1] S. Kajita and K. Tani, “Experimental study of biped dynamic walking,” IEEE
Control Systems Magazine, Vol. 16, pp. 13-19, 1996.
[2] M. H. Raibert, M. Chepponis and H.B. Brown, “Running on four legs as though
they were one,” IEEE Journal of Robotics and Automation, Vol. RA-2, pp. 70-82,
1986.
[3] M. J. Boggess, R.T. Schroer, R. D. Quinn and R. E. Ritzmann,“ Mechanized
cockroach footpaths enable cockroach-like mobility,” IEEE International
Conference on Robotics and Automation, pp. 2871-2876, 2004.
[4] R. J. Full, T. Kubow, J. Schmitt, P. Holmes and D. Koditschek, “Quantifying
dynamic stability and maneuverability in legged locomotion,” Integ and Comp.
Biol., 42, pp. 149-157, 2002.
[5] H. Kitano, M. Asada, I. Noda and H. Matsubara,“ RoboCup: robot world cup,”
IEEE Robotics and Automation Magazine, pp. 30-36, 1998.
[6] K. S. Espenschied, R. D. Quinn, R. D. Beer and H. J. Chiel, “Biologically based
distributed control and local reflexes improve rough terrain locomotion in a
hexapod robot,” Robotics and Autonomous Systems, pp. 59-64, 1996.
[7] R. D. Beer and J. G. Gallagher, “Evolving dynamical neural networks for
adaptive behavior,” Adaptive Behavior 1, pp. 92-122, 1992.
[8] K. Akimto and S. Watanabe, M. Yano, “An insect robot controlled by the
emergence of gait patterns,” Artificial Life Robotics, pp. 102-105, 1999.
[9] H. J. Chiel, R.D. Beer, R.D. Quinn and K. S. Espenschied,“ Robustness of a
distributed neural network controller for locomotion in a hexapod robot,” IEEE
Transactions on Robotics and Automation, pp. 293-303, 1992.
[10] J. M. Yang and J. H. Kim, “Fault-tolerant locomotion of the hexapod robot,”
IEEE Transactions on Systems, Man, and Cybernetics, pp. 109-116, 1998.
[11] K. S. Espenschied, R. D. Quinn, H. J. Chiel and R. D. Beer, “Leg coordination
mechanisms in the stick insect applied to hexapod robot locomotion,” Adaptive
Behavior, pp. 455-468, 1993.
[12] K. Eng, A.P. Robertson and D. R. Blackman, “Robbie the running robot: a
distributed learning system,” IEEE, pp. 100-105, 1997.
[13] R. D. Beer, R.D. Quinn, H. J. Chiel and R. E. Ritzmann, “Biologically inspired
55
逢甲大學e-Theses & Dissertations (102 學年度)
66.
以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
approachesto robotics,” Communications of the ACM, pp. 31-38, 1997.
[14] M. C. Birch, R. D. Quinn, G. Hahm, S. M. Philips, B. Drennan, R. D. Beer, X.
Yu, S. L. Garverick, S. Laksanacharoen, A. J. Pollack and R. E. Ritzmann, “A
miniature hybrid robot propelled by legs,” International Conference on
Intelligent Robots and Systems, pp. 845-851, 2001.
[15] G. M. Nelson, R. D. Quinn, R. J. Bachmann and W. C. Flannigan, “Design and
simulation of a cockroach-like hexapod robot,” International Conference on
Robotics and Automation, pp. 1106-1111, 1997.
[16] F. Delcomyn and M. E. Nelson, “Architectures for a biomimetic hexapod robot,”
Robotics and Autonomous Systems, pp. 5-15, 2000.
[17] J. E. Clark, J.G. Cham, S.A. Bailey, E.M. Froehlich, P.K.Nahata, R.J. Full and M.
R. Cutkosky, “Biomimetic design and fabrication of a hexapedal running robot,”
IEEE International Conference on Robotics and Automation, pp. 1-7, 2001.
[18] D. W. Marhefka and D. E. Orin, “A compliant contact model with nonlinear
damping for simulation of robotic systems,” IEEE Trans. Systems, Man and
Cybernetics, Vol.29, pp. 566–572, 1999.
[19] W.C. Flannigan, G.M. Nelson and R.D. Quinn, “Locomotion controller for a
crab-like robot,” IEEE International Conference on Robotics and Automation,
pp.152-156, 1998.
[20] T. Buschmann, S. Lohmeier, H. Ulbrich and F. Pfeiffer, “Dynamics simulation
for a biped robot: modeling and experimental verification,” IEEE International
Conference on Robotics and Automation, pp. 2673–2678, 2006.
[21] S. Kajita, K. Kaneko, K. Harada, F. Kanehiro, K. Fujiwara, and H. Hirukawa,
“Biped walking on a low friction floor,” IEEE International Conference on
Robotics and Automation, pp. 3546-3552, 2004.
[22] G. M. Nelson, Modeling and Simulation of an Insect-like Hexapod, M. S. Thesis,
Case Western Reserve University, 1995.
56
逢甲大學e-Theses & Dissertations (102 學年度)








![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
第一章序論
1
逢甲大學e-Theses & Dissertations (102 學年度)
1.1 前言
隨著科技的發展,人們在近年來對機器人的研究也越來越廣泛,像是工業用
機器人、農業用機器人、環境探測用機器人、安全檢查用機器人等,這些機器人
的發展能讓人類免除許多危險的工作,通常這些機器人都具備了移動的功能,這
樣就不會侷限於某一區塊的去動作。
機器人是一種仿生式的機器,能夠做像是動物、昆蟲的複雜動作,例如走動、
攀爬、跨越障礙物等等。機器人是一種自動化裝置的機器,但比較不一樣的是機
器人具備與生物相類似的智慧能力,如感知、規劃和動作能力,是一種具有高度
靈活性的自動化的機器。行走式機器人分為許多種,主要分成輪型和足型機器人。
每一種機器人的功能都不同,以足型機器人來說,雙足機器人對於重心的問題是
很重要的,若是處理得不好很容易就造成機器人的摔倒[1],而四足機器人的平
衡穩定問題就比雙足機器人好,但是當它舉起一隻腳,也可能因為重心不穩而翻
倒[2],這時六足機器人就發揮它正面功能,六足機器人的優點就是平衡能力佳,
可以舉起任一隻時仍維持平衡的狀態,也可以在不影響平衡狀況下,舉起任何二
隻腳[3,4]。
本研究目的在於為六足機器人建立模型,透過此模型讓機器人能夠做出正確
的行為能力,利用模擬結果來分析機器人的位置、速度、姿態角,以及腳與地面
接觸時,地面給予腳的反作用力以及它們之間的摩擦力,透過所得到的數值,確
認六足機器人的模擬平台是否能夠按照所指定的行為去動作。
1.2 文獻回顧
機器人以移動方式來區分的話,主要分為輪型機器人和足型機器人二大類。
輪型機器人的優點就是能夠在平坦的地面移動速度快,但若是遇到凹凸不平或是](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-11-320.jpg)
![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
有橫溝的地面,則移動的結果不慎理想,像是足球機器人[5];在足型機器人方
面,移動的速度較慢,但可適應較複雜的地形,而足型機器人平衡的立足點和腳
2
逢甲大學e-Theses & Dissertations (102 學年度)
支撐主體是一個重要的一環[6]。
最早的足型機器人的移動方式採用集中式控制,但其模擬出來的結果卻比昆
蟲來的緩慢,最主要原因就是集中式的控制所有腳的資料都要傳送到集中的系統,
在由集中系統傳送到每隻腳,這樣一個計算的過程過於繁雜耗時,這對於一個突
發的狀況來不及反應,因此由觀察昆蟲的移動來分析發展出分散式控制 [7]。
動物在行走時,通常都有其特定的步伐模式,這步伐模式有在腳之中擺動關
係的特性,而昆蟲在平坦的路面行走有兩種不同的步伐模式。昆蟲選擇適當的步
伐模式依據走路的速度和外部的負載,在快速度和負載輕,產生一個三角的步伐
(Tripod Gait);而在慢速度和負載重,在其中一邊的三隻腳移動像傳導波形式從
後腳到前腳,此步伐稱為異相步伐(Metachronal Gait) [8]。根據昆蟲生物學建立一
個分散式控制器,這控制器解決腳相互間的關係,進而使這控制器具有強健性和
產生連續步伐 [9,10,11]。對於具有分散式控制和局部反射能力的昆蟲對崎嶇
不平的地面適應能力比許多足型機器人來的佳,製作一個仿昆蟲的機械裝置克服
不穩定和障礙物環境的機器人 [6]。使用分散式控制系統不須由中央支配,因此
節省了許多傳遞的時間,把這樣一個概念運用在機器人運動控制上實現於深海或
荒涼的環境,證明分散式控制系統具有強健性和適應性 [12]。
觀察昆蟲腳相互間的關係,各種行進步伐上的控制實現在六足機器人上,在
神經生物學上,生物的腳有許多控制神經元,像是腳角度感測神經元,向前、向
後、抬起、放下神經元,腳動力神經元分別來控制腳運動 [13,14]。
蟑螂運動特性是快速跑動和攀登能力,所以以模仿蟑螂的身體結構和所具備
的優點來設計和模擬,六足機器人在腳的設計上,在前、中、後腳分別具備五、
四、三個自由度(degrees of freedom),且模仿蟑螂腳的力量,採用氣壓缸的方
式,是因為氣壓缸所產生的力量和蟑螂腳的力量很相似,而後腳比前、中腳來的](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-12-320.jpg)
![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
大,是為了實現像蟑螂優越的攀登能力 [15,16,17]。足型機器人的應用上,
機器人往往需要在環境中進行物理的接觸,以執行分配給他們的任務[18],在環
境上的探測還有安全的檢查,像是搜尋有無可疑的爆裂物品,這些危險的動作就
可以交給足型機器人就可以去完成[19],然而足型機器人行走時,腳和地面接觸
的性質,對於整體的動力學具有非常強烈的影響,所以其腳和地面的建模是很重
要的[20],除了在平坦的地面行走,機器人也會需要在惡劣的環境下去走動,像
是在冰面上行走,在如此光滑的冰面上行走,一不小心就會造成機器人的摔倒情
況,所以我們還需要計算其所需的摩擦係數來調整機器人的姿態,來完成機器人
3
逢甲大學e-Theses & Dissertations (102 學年度)
在冰面上行走的動作[21]。](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-13-320.jpg)






![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
計算水平力、最大靜摩擦力
Yes No
水平力>最大靜摩擦力
發生打滑; 沒有發生打滑
修正X、Y方向的反作用力及接觸點P
圖3.7 判斷腳是否打滑
若腳發生打滑則需要修正X、Y 方向的反作用力和接觸點P,而這時我們的
X、Y 方向的反作用力FFootX 及FFootY 要依據我們的動摩擦力來做更改,而動摩擦
F = cos KFriction
F = sin KFriction
q
q
P = P + cos SFriction / K
P = P + sin SFriction / K
15
逢甲大學e-Theses & Dissertations (102 學年度)
力KFriction 算法如式(3.4),其中k m
為動摩擦係數,修正FFootX 及FFootY 的算法如
式(3.5),其中q 為水平力FFootHorMag 和X 軸的夾角,並且接觸點P 則需要依靠靜
摩擦力來做更改,因為我們使用的模型具有阻尼的特性,所以接觸點P 不能以動
摩擦力作為更改的依據,而是仍要透過靜摩擦力來更改我們的接觸點P[22],如
式(3.6)所示,其流程如圖3.8。
KFriction =mk ×FFootZ (3.4)
×
×
FootX
FootY
q
q
(3.5)
×
×
X FootX Ground
Y FootY Ground
(3.6)
Entry
Return](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-25-320.jpg)
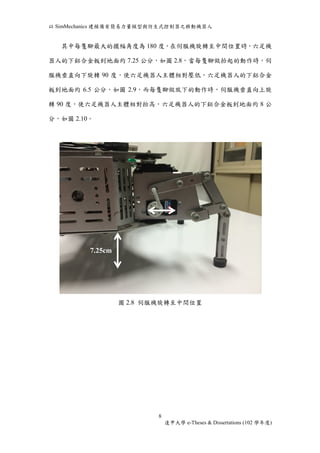
![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
Entry
地面下腳在地面上
地面上或地面下?
腳有接觸地面;
利用簡易力量模型計算腳與地面
之間的反作用力
正向力為負
正或負
正
計算水平力、最大靜摩擦力
Yes No
沒有發生打滑
水平力>最大靜摩擦力
Return
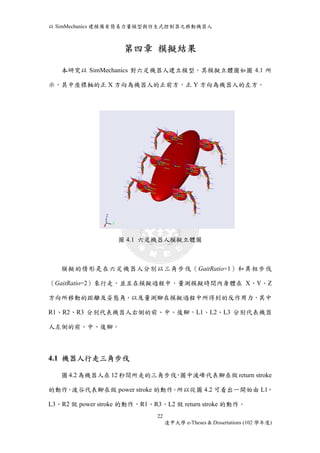
圖3.10 流程圖
17
腳沒有接觸地面;
腳與地面之間反作用力為0
逢甲大學e-Theses & Dissertations (102 學年度)
發生打滑;
修正X、Y方向的反作用力及接觸點P
3.3 控制器模型建立
機器人的行走速度控制,其控制理念主要依據於昆蟲的步伐行為,所以我們
透過昆蟲的步伐特性和步伐型態來建立控制器的模型。
在昆蟲行進的過程中,我們把腳抬起而向前擺至最前端位置然後把腳放下的
整個過程稱為return stroke,當結束return stroke 轉而進行腳向後揮擺至最後端位
置的過程稱為power stroke,其中最前端位置稱為anterior extreme position(AEP),
最後端位置稱為posterior extreme position(PEP)。而在行進過程中會得出幾點特
性:(1)同側腳在做return stroke 動作時,會呈現出由後腳往前腳的順序進行,
並且每隻腳的速度都一樣;(2)行走速度的快慢由power stroke 完成的速度來決
定;(3)不管什麼樣的步伐,左右兩側的步伐都保持180°的相位差;(4)AEP
都保持在固定位置。透過以上特性可得出一套步伐控制機制[11] ,在以這些特
性為前提下,這套完整的機制包含了三種不同作用的機制,來達到每隻腳之間互
相協調,達成自主性的控制。我們把這套機制方法用到六足機器人上,讓機器人](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-27-320.jpg)


































![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
參考文獻
[1] S. Kajita and K. Tani, “Experimental study of biped dynamic walking,” IEEE
Control Systems Magazine, Vol. 16, pp. 13-19, 1996.
[2] M. H. Raibert, M. Chepponis and H.B. Brown, “Running on four legs as though
they were one,” IEEE Journal of Robotics and Automation, Vol. RA-2, pp. 70-82,
1986.
[3] M. J. Boggess, R.T. Schroer, R. D. Quinn and R. E. Ritzmann,“ Mechanized
cockroach footpaths enable cockroach-like mobility,” IEEE International
Conference on Robotics and Automation, pp. 2871-2876, 2004.
[4] R. J. Full, T. Kubow, J. Schmitt, P. Holmes and D. Koditschek, “Quantifying
dynamic stability and maneuverability in legged locomotion,” Integ and Comp.
Biol., 42, pp. 149-157, 2002.
[5] H. Kitano, M. Asada, I. Noda and H. Matsubara,“ RoboCup: robot world cup,”
IEEE Robotics and Automation Magazine, pp. 30-36, 1998.
[6] K. S. Espenschied, R. D. Quinn, R. D. Beer and H. J. Chiel, “Biologically based
distributed control and local reflexes improve rough terrain locomotion in a
hexapod robot,” Robotics and Autonomous Systems, pp. 59-64, 1996.
[7] R. D. Beer and J. G. Gallagher, “Evolving dynamical neural networks for
adaptive behavior,” Adaptive Behavior 1, pp. 92-122, 1992.
[8] K. Akimto and S. Watanabe, M. Yano, “An insect robot controlled by the
emergence of gait patterns,” Artificial Life Robotics, pp. 102-105, 1999.
[9] H. J. Chiel, R.D. Beer, R.D. Quinn and K. S. Espenschied,“ Robustness of a
distributed neural network controller for locomotion in a hexapod robot,” IEEE
Transactions on Robotics and Automation, pp. 293-303, 1992.
[10] J. M. Yang and J. H. Kim, “Fault-tolerant locomotion of the hexapod robot,”
IEEE Transactions on Systems, Man, and Cybernetics, pp. 109-116, 1998.
[11] K. S. Espenschied, R. D. Quinn, H. J. Chiel and R. D. Beer, “Leg coordination
mechanisms in the stick insect applied to hexapod robot locomotion,” Adaptive
Behavior, pp. 455-468, 1993.
[12] K. Eng, A.P. Robertson and D. R. Blackman, “Robbie the running robot: a
distributed learning system,” IEEE, pp. 100-105, 1997.
[13] R. D. Beer, R.D. Quinn, H. J. Chiel and R. E. Ritzmann, “Biologically inspired
55
逢甲大學e-Theses & Dissertations (102 學年度)](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-65-320.jpg)
![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
approaches to robotics,” Communications of the ACM, pp. 31-38, 1997.
[14] M. C. Birch, R. D. Quinn, G. Hahm, S. M. Philips, B. Drennan, R. D. Beer, X.
Yu, S. L. Garverick, S. Laksanacharoen, A. J. Pollack and R. E. Ritzmann, “A
miniature hybrid robot propelled by legs,” International Conference on
Intelligent Robots and Systems, pp. 845-851, 2001.
[15] G. M. Nelson, R. D. Quinn, R. J. Bachmann and W. C. Flannigan, “Design and
simulation of a cockroach-like hexapod robot,” International Conference on
Robotics and Automation, pp. 1106-1111, 1997.
[16] F. Delcomyn and M. E. Nelson, “Architectures for a biomimetic hexapod robot,”
Robotics and Autonomous Systems, pp. 5-15, 2000.
[17] J. E. Clark, J.G. Cham, S.A. Bailey, E.M. Froehlich, P.K.Nahata, R.J. Full and M.
R. Cutkosky, “Biomimetic design and fabrication of a hexapedal running robot,”
IEEE International Conference on Robotics and Automation, pp. 1-7, 2001.
[18] D. W. Marhefka and D. E. Orin, “A compliant contact model with nonlinear
damping for simulation of robotic systems,” IEEE Trans. Systems, Man and
Cybernetics, Vol.29, pp. 566–572, 1999.
[19] W.C. Flannigan, G.M. Nelson and R.D. Quinn, “Locomotion controller for a
crab-like robot,” IEEE International Conference on Robotics and Automation,
pp.152-156, 1998.
[20] T. Buschmann, S. Lohmeier, H. Ulbrich and F. Pfeiffer, “Dynamics simulation
for a biped robot: modeling and experimental verification,” IEEE International
Conference on Robotics and Automation, pp. 2673–2678, 2006.
[21] S. Kajita, K. Kaneko, K. Harada, F. Kanehiro, K. Fujiwara, and H. Hirukawa,
“Biped walking on a low friction floor,” IEEE International Conference on
Robotics and Automation, pp. 3546-3552, 2004.
[22] G. M. Nelson, Modeling and Simulation of an Insect-like Hexapod, M. S. Thesis,
Case Western Reserve University, 1995.
56
逢甲大學e-Theses & Dissertations (102 學年度)](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-66-320.jpg)
![以SimMechanics 建模備有簡易力量模型與仿生式控制器之移動機器人
附錄一
Entry
Intput Parameter
Get
PFootX VX
PFootY VY
PFootZ VZ
limbcond == 1 limbcond == 0
NO
y = [FFootX,FFootY FFootZ]
YES
完整程式流程圖
57
if PFootZ <= PZ
YES
PX = PFootX
PY = PFootY
limbcond = 1
FFootX = 0
FFootY = 0
FFootZ = 0
NO
Return
逢甲大學e-Theses & Dissertations (102 學年度)
FFootZ = NetForce
NetForce = KGround * (PZ - PFootZ) - CGround * VFootZ
FFootX = KGround * (PX - PFootX) - CGround * VFootX
FFootY = KGround * (PY - PFootY) - CGround * VFootY
FFootHor = sqrt(FFootX ^ 2 + FFootY ^ 2)
SFriction = MuS * FFootZ
KFriction = MuK * FFootZ
FFootX = 0
FFootY = 0
FFootZ = 0
NO
YES
limbcond == 0
or
limbcond == 1
if FFootHor > SFriction
XCOS = FFootX/FFootHorMag
YSIN = FFootY/FFootHorMag
FFootX = XCOS * KFriction
FFootY = YCOS * KFriction
PX = PFootX + XCOS * SFriction / KGround
PY = PFootY + YSIN * SFriction / KGround
if NetForce <= 0](https://image.slidesharecdn.com/fb141119205602-141120012309-conversion-gate01/85/SimMechanics-67-320.jpg)

































