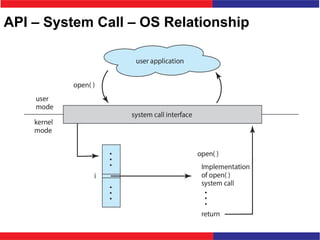
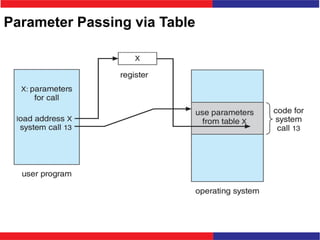
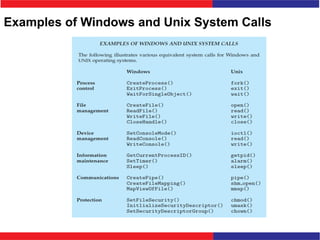
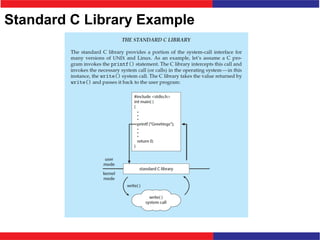
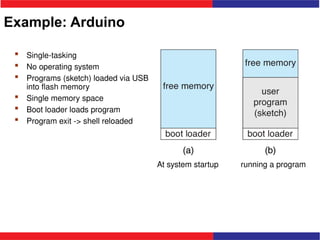
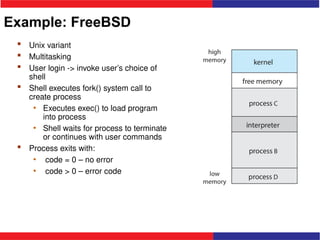
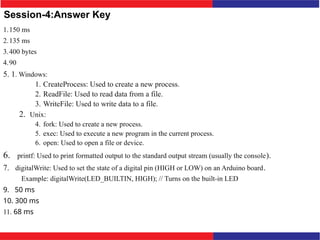
The document recaps key concepts related to system calls studied in previous sessions, covering operating system services, user interfaces, file-system manipulation, program execution, and types of system calls. It explains the relationship between APIs, system calls, and operating systems, detailing parameter passing methods and examples from both Windows and Unix systems. Additionally, it includes exercises and solutions for calculating time and memory associated with system calls and functions in programming.