DEPARTMENT OF ELECTRICALENGINEERING
A SEMINAR PRESENTATION
ON
ROBOTICS AND ITS APPLICATION.
PRESENTED BY
SHIPALKAR SANKET SOMNATH
GUIDED BY
Mr.A.V.Golande
VIDYA PRATISHTHAN’S KAMALNAYAN BAJAJ
INSTITUTE OF ENGINEERING AND
TECHNOLOGY, BARAMATI
Robotics is abranch of engineering and computer sciences that involves
the conception ,design ,manufacture and operation of robots .
Law of robotics.
First law : A robot may not injure human beings.
Second law : A robot must obey the orders given it by human beings
Third law: A robot must protect its own existence.
INTRODUCTION
4.
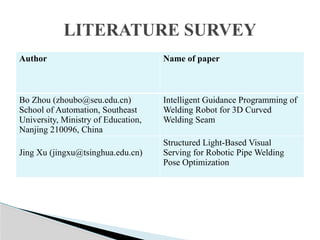
LITERATURE SURVEY
Author Nameof paper
Bo Zhou (zhoubo@seu.edu.cn)
School of Automation, Southeast
University, Ministry of Education,
Nanjing 210096, China
Intelligent Guidance Programming of
Welding Robot for 3D Curved
Welding Seam
Jing Xu (jingxu@tsinghua.edu.cn)
Structured Light-Based Visual
Serving for Robotic Pipe Welding
Pose Optimization
6.
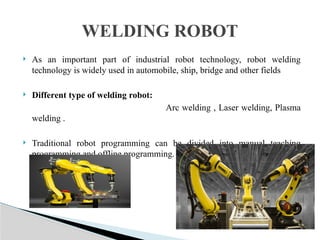
As animportant part of industrial robot technology, robot welding
technology is widely used in automobile, ship, bridge and other fields
Different type of welding robot:
Arc welding , Laser welding, Plasma
welding .
Traditional robot programming can be divided into manual teaching
programming and offline programming.
WELDING ROBOT
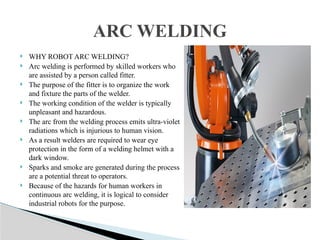
WHY ROBOTARC WELDING?
Arc welding is performed by skilled workers who
are assisted by a person called fitter.
The purpose of the fitter is to organize the work
and fixture the parts of the welder.
The working condition of the welder is typically
unpleasant and hazardous.
The arc from the welding process emits ultra-violet
radiations which is injurious to human vision.
As a result welders are required to wear eye
protection in the form of a welding helmet with a
dark window.
Sparks and smoke are generated during the process
are a potential threat to operators.
Because of the hazards for human workers in
continuous arc welding, it is logical to consider
industrial robots for the purpose.
ARC WELDING
9.
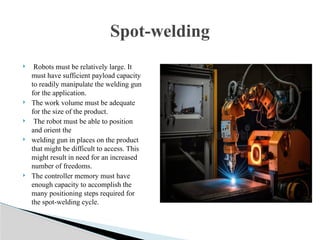
Robots mustbe relatively large. It
must have sufficient payload capacity
to readily manipulate the welding gun
for the application.
The work volume must be adequate
for the size of the product.
The robot must be able to position
and orient the
welding gun in places on the product
that might be difficult to access. This
might result in need for an increased
number of freedoms.
The controller memory must have
enough capacity to accomplish the
many positioning steps required for
the spot-welding cycle.
Spot-welding
10.
Robotic weldingis a manufacturing process that uses robotic systems to
automate the welding process.
Types
(There are two types of robotic welding: automatic and semi-automatic.)
Component
(Robotic welding systems typically include a mechanical unit, a controller, a wire feeder, and a torch.)
Programming
(The welding program can be reprogrammed for different projects)
METHODOLOGY
11.
Quality
(Robotic welding canproduce consistent, high-quality welds with less spattering.)
Efficiency
(Robotic welding can be faster and more productive than manual welding because the robot doesn't
need to take breaks)
Cost
(Robotic welding can reduce the cost per piece because the robot can produce more welded parts.)
12.
Speed: Roboticwelding can work 24/7 and can complete large runs of
thousands of assemblies quickly.
Safety: Robotic welding can help keep workers safe by removing them
from potentially dangerous processes.
Repeatability: Robotic welders can continuously perform the
same welding cycle.
ADVANTAGES
13.
Not idealfor small projects : Robotic welding is best for large or long-
term projects, as the programming time can be longer than the welding job
itself for smaller projects.
Initial cost : Robotic welding systems can be expensive to buy and install,
and may take a while to recoup the cost.
Maintenance costs : There are ongoing costs for maintaining robotic
welding machinery.
DISADVANTAGES
14.
Material handling
Pick and place
Mechanical Cutting, Grinding, and Polishing
Painting
Arc welding
Laser welding
Spot welding
APPLICATIONS
15.
Robotic weldingis a transformative technology that has revolutionized the
manufacturing industry. It offers numerous benefits such as increased
productivity, improved quality, and enhanced safety.
In order to solve the problem that the traditional welding robot
programming method is suitable for 3D curved welding seam, the design
of intelligent guidance program system for welding robot is proposed.
CONCLUSION
16.
Increased Automation:As industries seek to improve efficiency, the use
of robotic welding will expand, automating more complex and high-
volume tasks
AI and Machine Learning: Integrating AI will improve process
optimization, allowing robots to learn and adapt in real-time for better
precision and quality control.
Remote Monitoring and Maintenance: IOT integration will facilitate
real-time monitoring, predictive maintenance, and remote troubleshooting,
reducing downtime and improving operational efficiency.
FUTURE SCOPE
17.
M.Ferreira ,A.P.Moreira,and P.Neto, Alow-costlaser scanning solution for
exible robotic cells: Spray coating, Int. J. Adv. Manuf. Technol., vol. 58,
nos. 912, pp. 10311041. 2012.
P. Neto, J. N. Pires, and A. P. Moreira, CAD-based off-line robot pro
gramming , in Proc . IEEE Conf. Robot., Autom,Mechatronics, Singapore,
Jun. 2010, pp. 516521.
REFERENCES






























![AKHIL[1][1].pdf[1].pptx electrical engineering](https://cdn.slidesharecdn.com/ss_thumbnails/akhil11-250423082731-ca623661-thumbnail.jpg?width=640&height=640&fit=bounds)