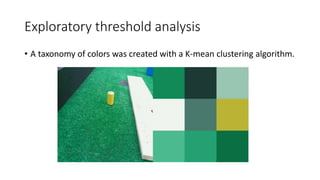
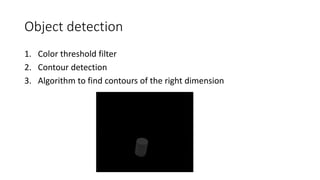
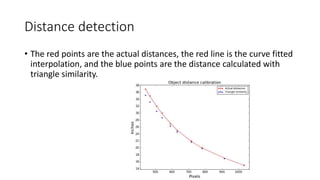
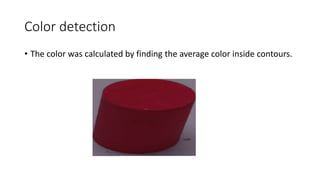
Rohan Kotwani developed an industrial image processing application using OpenCV and Python on a Raspberry Pi 2 camera to navigate a robot to detect and place colored blocks into corresponding bins for an IEEE robotics competition. The application used color thresholding, contour detection, and distance algorithms to identify colors, locate objects, and determine placement despite challenges with lighting, noise, and camera angles. Image data was sent via serial communication from the Raspberry Pi to an Arduino Mega controlling the robot.














































![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)