Download as PDF, PPTX
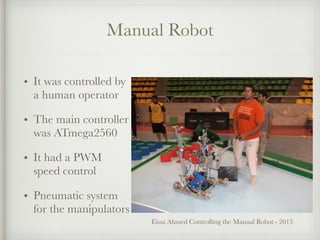

The document describes the team that participated in ABU ROBOCON 2013 from Alexandria University in Egypt. The 10-member team consisted mainly of third-year undergraduate students from electrical, electronics, mechanical, and mechanical engineering departments. They created two collaborating robots - a manual robot controlled by a human operator and an automated robot that used sensors and a PID controller - to complete the competition's theme of "The Green Planet". Their goal was to program the automated robot to navigate and complete tasks while the manual robot assisted with manipulators and tasks requiring more dexterity.













![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)

































